Тема 2.1. Использование и настройка БПЛА. Использование и настройка бпла обозначения и сокращения
 Скачать 6.8 Mb. Скачать 6.8 Mb.
|

Настройки полетного контроллера (Flight controller settings)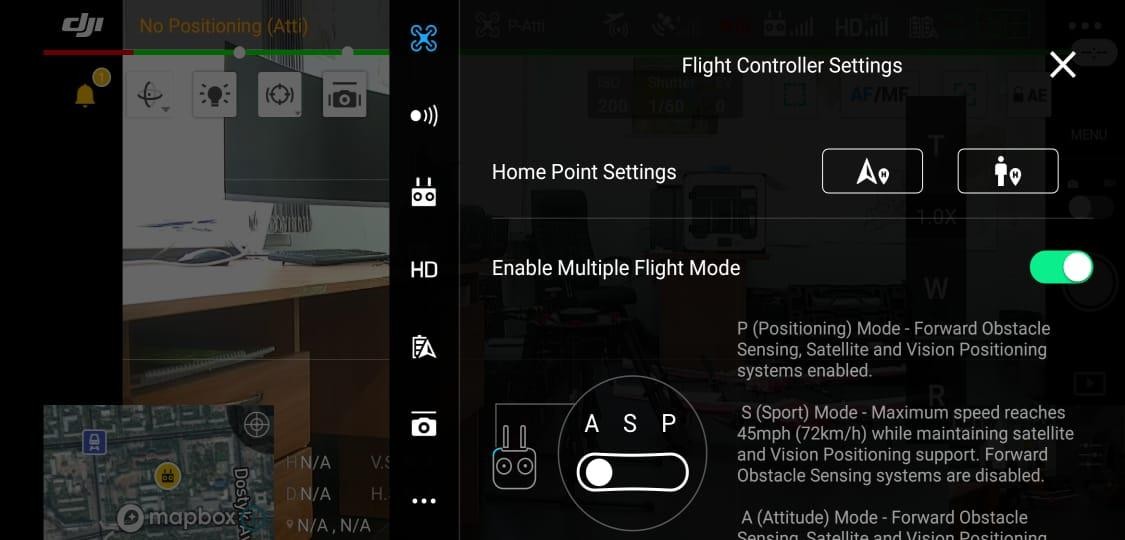 Настройка точки возврата домой (Home Point Settings) - здесь вы можете настроить точку возврата дрона домой. Это может быть либо место, с которого дрон поднимался, либо место, с которого пилот запускал дрон. 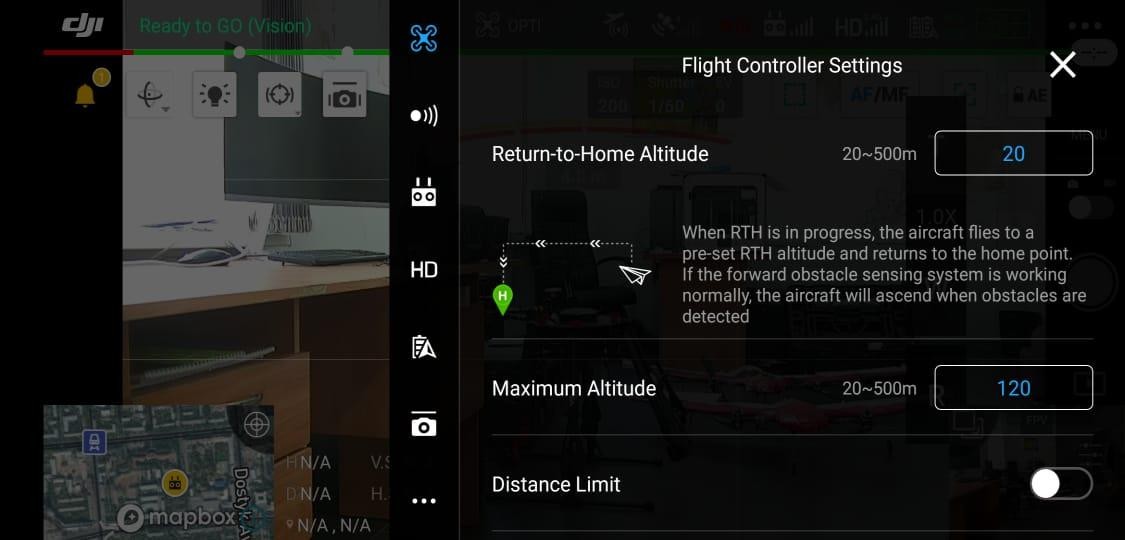 Return to home altitude - здесь устанавливается высота, на которой дрон будет возвращаться домой. Maximum Altitude – ограничение по высоте полета. Distance limit – ограничение по дальности полета. 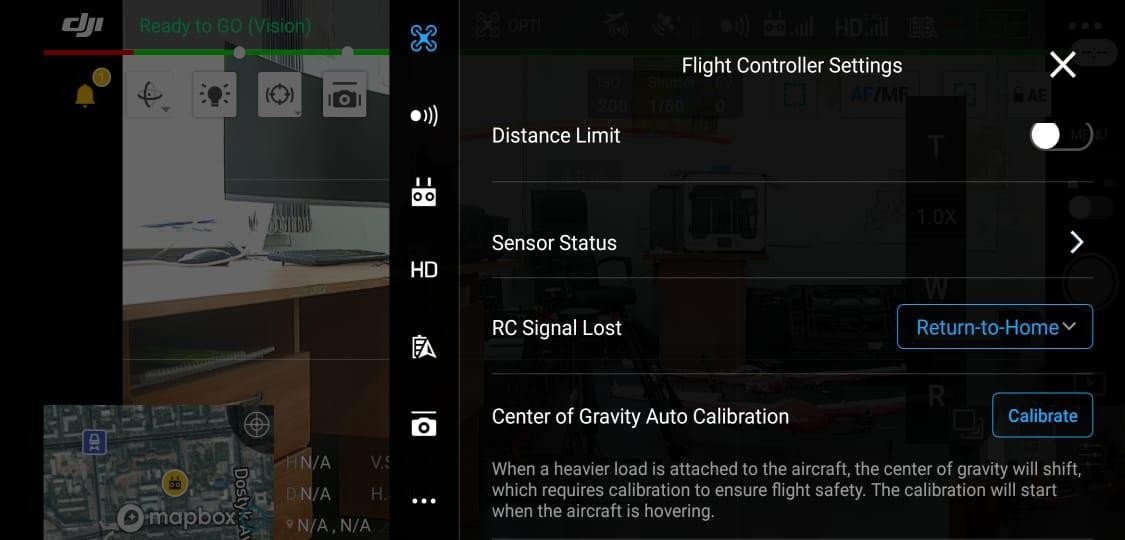 Sensor status – здесь мы можем увидеть состояние IMU и компаса а также при необходимости их откалибровать. RS signal lost – что сделает дрон в случае потери сигнала от дистанционного пульта управления. Программа предлагает несколько вариантов: Return to home – возврат на точку взлета; Hover – зависнит на месте где произойдет потеря сигнала; Land – посадка в месте потери сигнала. Advanced Controller Settings - режим управления на продвинутом уровне эта функция позволяет настроить чувствительность стиков управления. Чем выше чувствительность, тем быстрее дрон реагирует на изменения положения стиков. Экспоненциальная кривая EXP (Exponential Curve) -экспоненциальная кривая (EXP) отражает взаимодействие между стиками и дроном. Ось Х показывает уровень нажатия на стик, а Ось Y показывает уровень отклика дрона на это нажатие, основанный на настроенной EXP кривой. Чувствительность стиков (Sensitivity)- в этом разделе приложения вы можете настроить чувствительность стиков управления: Реакция дрона (Attitude): здесь можно настроить как быстро дрон будет реагировать на ваши действия. Тормоз (Brake): это управление тормозной системой. Можно настроить как быстро дрон затормозит в режиме подключения к GPS. Чем выше значение, тем более резким будет торможение. Цель (Gain) - в этих настройках отображается как быстро дрон сможет реагировать на внешние погодные изменения, например, ветер. Рекомендуется не менять эти настройки, если вы не профессиональный пилот. Эти настройки влияют на поведение дрона в небе. Если настроить их неправильно, то дрон будет вести себя непредсказуемо во время полета. Система обнаружения препятствий (Visual Navigation Settings)Здесь вы можете управлять сенсорами. Рекомендуется, чтобы все сенсоры всегда были включены. Включение функции “обнаружение препятствий” Enable Obstacle 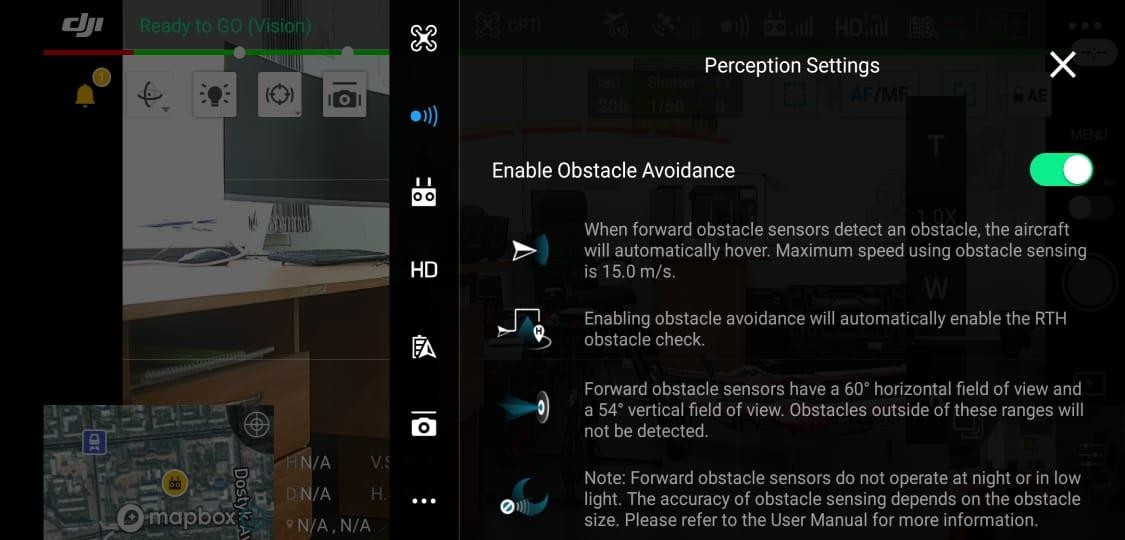 Avoidance: при этой настройке ваш дрон будет обнаруживать препятствие, находящееся впереди. При обнаружении препятствия, дрон самостоятельно снизит скорость до 10 м/с и начнет тормозить. Эта функция может плохо работать при очень ярком освещении, а также сложно различимы тонкие провода. Продвинутые настройки сенсоров Advanced Sensor Settings Отображение диаграммы Display Radar Chart: при включении этой функции, слева внизу на экране полета будет отображаться маленькая диаграмма, показывающая расположение дрона во время полета. Включение позиционирования обзора Enabled Vision Positioning: эта функция включает нижние сенсоры, что позволяет сохранять дрон в фиксированном положении при зависании. Если эта функция отключена, то при плохом сигнале GPS дрон зависнет и будет медленно двигаться. Защита при посадке Landing Protection: эта функция позволяет дрону проверить местность на возможность посадки.  Точность посадки Precision Landing: эта функция дает возможность дрону приземлиться на то же самое место, с которого он стартовал (при условии включенной функции RTH “возврат домой”). Проверка наличия препятствий при “возврате домой” RTH Obstacle Check: дрон автоматически начнет снижение, при обнаружении любого препятствия при “возврате домой”. Что касается модели DJI Spark, то если дальность возврата на точку “домой” 100 м, то дрон не сможет обойти препятствие, так как скорость полета будет слишком высокой. 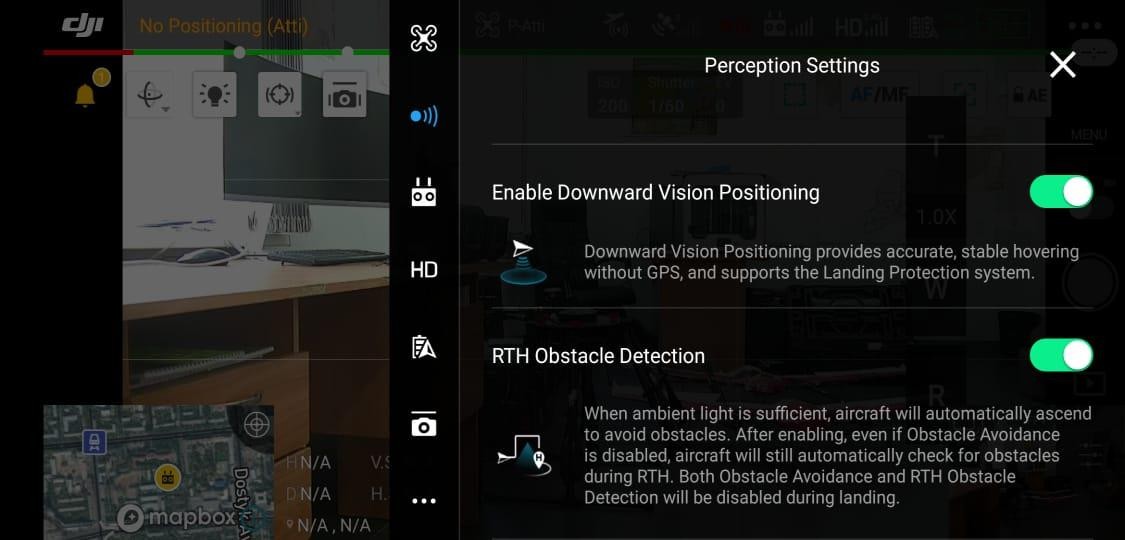 |