Востриков насосные. Курсовая работа по дисциплине Электрические машины и электропривод Расчет энергетических показателей электроприводов типовых технологических процессов
 Скачать 3.82 Mb. Скачать 3.82 Mb.
|

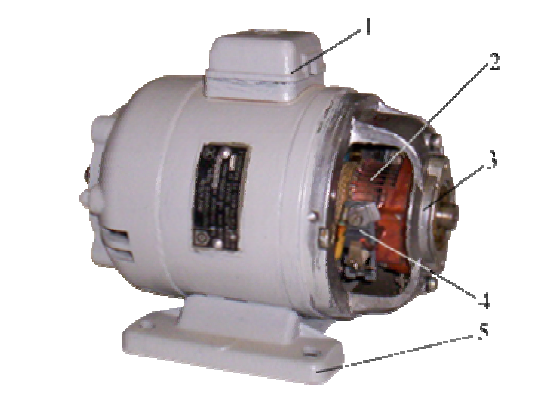 На рисунке 12 показана машина постоянного тока серии ПЛ-061У4 мощностью 60 Вт частотой вращения 1500 об/мин. На рисунке 12 показана машина постоянного тока серии ПЛ-061У4 мощностью 60 Вт частотой вращения 1500 об/мин.Рисунок 12. Двигатель постоянного тока 1 – клеммная коробка; 2 – коллектор; 3 – подшипниковый щит; 4 – щетки. 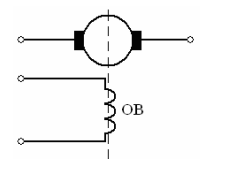 Условное обозначение машины постоянного тока в схемах электрических цепей показано на рисунке 13. Условное обозначение машины постоянного тока в схемах электрических цепей показано на рисунке 13.Рисунок 13. Условное обозначение машины постоянного тока в схемах электрических цепей. Принцип действия двигателя постоянного тока Схема включения двигателя постоянного тока показана на рисунке 14. Здесь РМ – рабочий механизм, приводимый в движение электрическим двигателем. Обмотка возбуждения двигателя постоянного тока подключена к источнику постоянного напряжения Uв. Постоянный ток обмотки возбуждения Iв создает постоянное магнитной поле с магнитным потоком Фв. Магнитный поток замыкается в магнитной цепи машины по путям, обозначенным на рисунке 8 пунктирными линиями. Магнитный поток возбуждения пронизывает обмотку якоря двигателя постоянного тока. 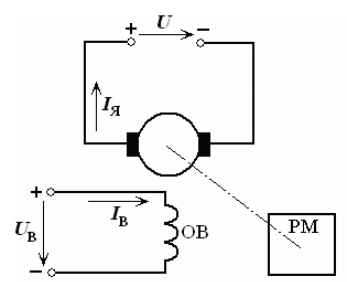 Рисунок 14. Схема включения двигателя постоянного тока. Обмотка якоря также подключена к источнику постоянного напряжения U, под действием которого в ней возникает ток якоря IЯ. Через скользящий щеточный контакт ток якоря подается в его обмотку таким образом, что его направление в проводниках, расположенных в зоне одного полюса, оказывается всегда постоянным (под северным полюсом – одного направления, под южным – другого). В соответствии с явлением силового действия магнитного поля на проводники обмотки якоря с током, находящиеся в магнитном поле возбуждения, действует электромагнитная сила. Направление действия силы определяется правилом левой руки. На рисунке 15 схематично показана верхняя часть якоря, находящаяся в магнитном поле возбуждения под северным полюсом. Обмотка якоря упрощенно представлена несколькими проводниками круглого сечения. 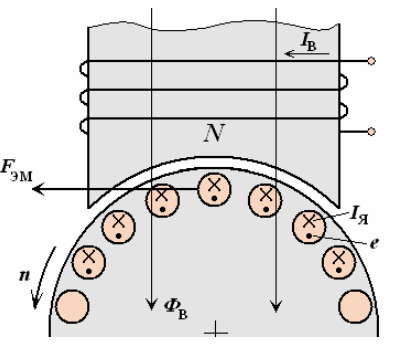 Рисунок 15. Принцип действия двигателя постоянного тока. Направление тока в проводниках обмотки якоря определяется полярностью подключения ее к источнику постоянного напряжения. На рисунке 15 ток обмотки якоря обозначен крестиком, что соответствует направлению за плоскость рисунка. Направление магнитного потока определяется направлением тока в обмотке возбуждения (полярностью подключения обмотки возбуждения). При указанных на рисунке 15 направлениях магнитного потока возбуждения и тока якоря на проводники обмотки якоря действует электромагнитная сила, направленная влево. Силы, действующие на каждый проводник обмотки якоря, складываются и создают электромагнитный вращающий момент МЭМ, приводящий якорь во вращение с частотой вращения n. При этом якорь, вращая рабочий механизм, совершает механическую работу. Таким образом, энергия электрического тока, подведенная к двигателю, преобразуется в механическую энергию. Для изменения направления вращения двигателя достаточно изменит полярность подключения обмотки якоря или обмотки возбуждения. При вращении якоря ДПТ проводники обмотки якоря движутся в магнитном поле возбуждения. При этом в обмотке якоря индуцируется ЭДС, направление которой определяется правилом правой руки. В двигателе эта ЭДС направлена противоположно току и напряжению якоря (рисунок 15) и компенсирует приложенное напряжение. Принцип действия генератора постоянного тока. Схема включения двигателя постоянного тока показана на рисунке 16. Здесь Д – приводной двигатель, вращающий вал генератора. 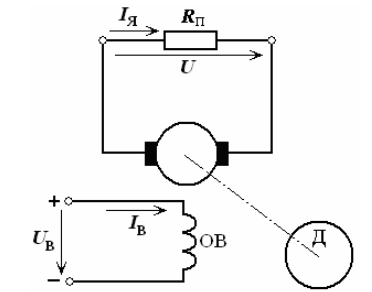 Рисунок 16. Схема включения генератора постоянного тока. Обмотка возбуждения генератора постоянного тока подключена к источнику постоянного напряжения Uв также, как в ДПТ. Постоянный ток обмотки возбуждения создает постоянное магнитной поле с магнитным потоком Фв. Магнитный поток замыкается в магнитной цепи машины по путям, обозначенным на рисунке 8 пунктирными линиями. Магнитный поток возбуждения пронизывает обмотку якоря генератора постоянного тока. Якорь генератора вращается приводным двигателем Д (турбина, двига- 14 тель внутреннего сгорания и т.п.) с частотой вращения n. Проводники обмотки якоря, вращаясь вместе с ним движутся в магнитном поле возбуждения. При этом проявляется индукционное действие магнитного поля. Согласно закону электромагнитной индукции в таких проводниках индуцируется ЭДС, направление которой определяется правилом правой руки. На рисунке 17 при указанных направлениях магнитного потока и вращения якоря ЭДС e в проводниках обмотки якоря направлена вдоль проводника за плоскость рисунка. Это направление обозначено крестиком. 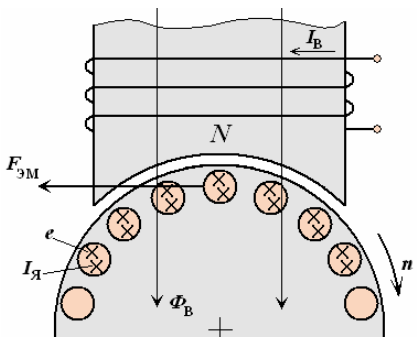 Рисунок 17. Принцип действия генератора постоянного тока. Конструкция обмотки якоря такова, что все ее проводники соединены последовательно. При этом ЭДС всех проводников складываются и создают разность электрических потенциалов, которая через пластины коллектора и щетки подается к зажимам генератора. На зажимах обмотки якоря генератора создается напряжение U. Если к зажимам обмотки якоря генератора присоединить приемник электрической энергии с сопротивлением Rп , то образуется электрическая цепь, в которой под действием напряжения U возникает ток IЯ , который замыкается в приемнике. Таким образом, генератор постоянного тока, потребляя от приводного двигателя механическую энергию, отдает электрическую энергию электроприемникам во внешнюю электрическую цепь, т.е. преобразует 15 механическую энергию в электрическую. Ток IЯ замыкается во всех проводниках обмотки якоря. При этом согласно явлению силового действия магнитного поля на каждый проводник с током, находящийся в магнитном поле возбуждения, действует электромагнитная сила FЭМ. Направление действия силы определяется правилом левой руки. Как видно на рисунке 17, электромагнитные силы, действующие на проводники обмотки якоря, создают тормозной электромагнитный момент, направленный навстречу вращению якоря. Этот электромагнитный момент уравновешивает механический момент приводного двигателя. Способы возбуждения машин постоянного тока Важным классификационным признаком машин постоянного тока является способ возбуждения главного магнитного поля, от которого зависят все основные характеристики как двигателей, так и генераторов. Существуют четыре способа возбуждения машин постоянного тока: независимое, параллельное, последовательное и смешанное возбуждение. На рисунке 18 показаны схемы включения обмотки якоря и обмотки возбуждения при разных способах возбуждения. Указанные на схемах направления токов соответствуют работе машины в режиме генератора. При независимом возбуждении (рисунок 18, а) обмотка возбуждения питается от независимого источника с напряжением Uв. Ток приемника электроэнергии, подключенного к генератору, равен току якоря IЯ. В генераторе с параллельным возбуждением (рисунок 18, б) обмотка возбуждения подключена к зажимам якоря. Ток возбуждения определяется напряжением на зажимах генератора и равен  где Rв – сопротивление обмотки возбуждения; U – напряжение на зажимах генератора.  Рисунок 18. Способы возбуждения машин постоянного тока. При этом соотношение между токами возбуждения, якоря и приемника определяется первым законом Кирхгофа:  Обмотка возбуждения в такой МПТ выполняется из тонкого провода с большим числом витков и обладает большим электрическим сопротивлением. В генераторе с последовательным возбуждением (рисунок 18, в) обмотка возбуждения включается последовательно с обмоткой якоря. При этом токи якоря, 17 возбуждения и приемника равны между собой:  Последовательная обмотка возбуждения выполняется из провода большого сечения с малым числом витков и обладает небольшим электрическим сопротивлением. Малое сопротивление последовательной обмотки возбуждения незначительно сказывается на соотношении тока и напряжения в цепи якоря. Генератор со смешанным возбуждением (рисунок 18, г) имеет две обмотки возбуждения: параллельную и последовательную. Генераторы с параллельным, последовательным и смешанным возбуждением получили название генераторов с самовозбуждением, поскольку их обмотки возбуждения питаются от зажимов собственного якоря. 1.2.1 Магнитная цепь МПТ При проектировании МПТ необходимо определить зависимость основного магнитного потока Ф от тока возбуждения. Эту задачу решают расчетом магнитной цепи машины при холостом ходе, когда ток якоря Ia = 0. Магнитной цепью принято считать совокупность устройств с ферромагнитными телами, образующих замкнутую цепь, в которой при наличии магнитодвижущей силы образуется магнитный поток, и вдоль которых замыкаются линии магнитной индукции. Типовой эскиз МЦ приведен на рисунке 19. Размеры отдельных элементов магнитной цепи и их параметры определяют тип характеристик, т. е., в конечном итоге, эксплуатационные свойства МПТ (двигателя) и надежность работы машины. Вследствие симметрии устройства машины и равенства потоков всех полюсов достаточно рассмотреть магнитную цепь одной пары полюсов.  Рисунок 19. Магнитная цепь МПТ: 1-станина (ярмо), 2-сердечник полюса, 3-якорь, 4-зубцы якоря, 5-витки обмотки возбуждения, 6-полюсной наконечник. 1.2.2 Расчёт магнитной цепи МПТ в ПО «Ротор». Расчет магнитной цепи и магнитной характеристики МПТ выполнялся с использованием программы «Ротор v1.3», которая была выдана преподавателем. Программа выполнена на языке DELPHI 0.7. В окне пользовательского интерфейса (рисунок 20) представлены исходные данные и результаты расчета магнитной цепи машины постоянного тока. Окно снабжено «Инструкцией», необходимыми комментариями и «ключами». «Ключи» не позволяют механически использовать программу, а заставляют обращаться к методическим указаниям и вникать в расчет. Для расчета в поле «Исходные данные» были введены данные согласно варианту. Запуск программы осуществлялся нажатием кнопки «Начать». Необходимые справочные данные вызывались соответствующими кнопками (магнитная индукция, напряженность и т. п.). После заполнения поля результатами вычисления нажали кнопку «График» для построения магнитной характеристики Ф =f(Ff) (рисунок 21). Для проверки расчета МЦ и магнитной характеристики МПТ выполняется с использованием программы «Ротор v2.0» программа выполнена на языке DELPHI 0.7. 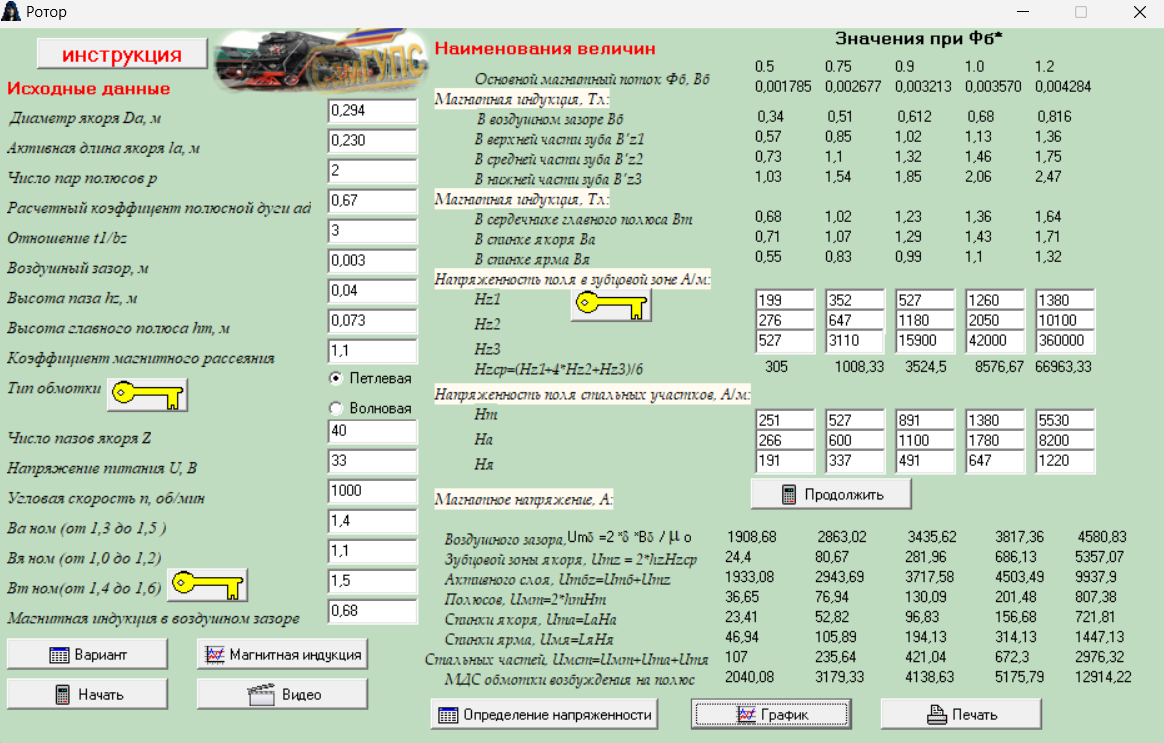 Рис. 20. Интерфейс пользователя программы «Ротор v2.0» с результатами расчётов. 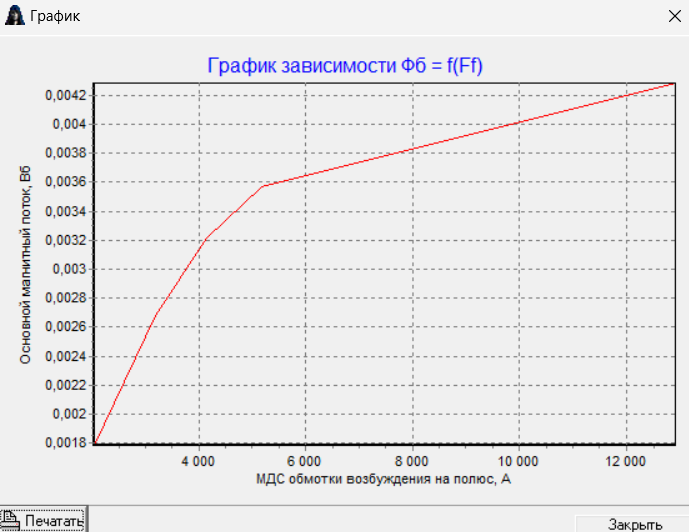 Рис. 21. График магнитной характеристики  1.2.3 Расчет коэффициента насыщения. Kн = Ff / Uм при Ф* = 1,0. Kн = Ff / Uм = 4138,63/3435,62=1,21 1.3 Заключение Для машин постоянного тока коэффициент насыщения располагается в диапазоне от 1,2 до 1,7, в котором происходит преобразование одного вида энергии в другой. Принимаем полученный результат. 2. Электропривод. 2.1 Краткие теоретические сведения по основам электропривода Электропривод – электромеханическая система (рисунок 22), состоящая из управляющего 1, преобразовательного 2, электродвигательного (ЭДУ) 3 и передаточного 4 устройств, предназначенная для преобразования электрической энергии в механическую и управления ею. Электропривод получает питание от системы электроснабжения (СЭС), имеет в своем составе средства обратной связи (COС) и приводит в целенаправленное механическое движение рабочую машину (исполнительный рабочий механизм – РМ), которая нагружает его моментом Мс. Электрическая энергия напряжением U и частотой ƒ в двигательном и ряде тормозных режимов привода поступает от СЭС в его систему, необратимо преобразуется в тепло и механическую энергию вращения или поступательного движения РМ, а реактивная энергия индуктивного характера, определяющая обратимый процесс преобразования, возвращается в СЭС. При генераторном тормозном режиме привода и работе РМ в двигательном режиме привод становится источником активной энергии и отдает ее в СЭС.  Рисунок 22. схема электропривода С помощью управляющего устройства 1 механическая энергия РМ может целенаправленно регулироваться. В качестве такого устройства используются от простейшего выключателя напряжения до сложного микропроцессора или ЭВМ, а преобразовательным служит устройство 2, которое согласует электрический сигнал управления с параметрами и величинами электрической энергии питания ЭДУ и имеет вид одного из электрических преобразователей: магнитного усилителя, тиристорного преобразователя, двигатель-генератора, дросселя насыщения, вентильного и электромашинного преобразователя. ЭДУ может состоять из одного или нескольких различных или одинаковых двигателей, которые могут иметь разные электрические и механические связи. Передаточные устройства приводов 4 могут быть представлены простейшими передаточными муфтами, редукторами или мультипликаторами, а также устройствами с гидро-, пневмо- или электромагнитными механизмами. Средствами обратной связи СОС в электроприводе выступают различные технические средства электрических измерений и преобразования неэлектрических величин в электрические, которые служат для целенаправленного и более эффективного управления. Электропривод (ЭП) в промышленности используется для приведения во вращательное движение рабочих органов механизмов и управления этим движением в ряде различных машин: механизмов подъема и передвижения, тормозных механизмов, противоугонных устройств; механизмов непрерывного транспорта – ленточных, скребковых транспортеров и винтовых конвейеров – шнеков; автопогрузчиков и электрического инструмента. Он также применяется в запорных и регулирующих устройствах гидро-, пневмо- и иных транспортных коммуникаций технологических процессов и в качестве индивидуальных приводов насосных, компрессорных и других агрегатов подачи воды, воздуха, цемента, химдобавок, инертных наполнителей и т. п. ЭП можно классифицировать по следующим характеристикам: – индивидуальный, групповой, взаимосвязанный и др. 2.2 Примеры отраслевых систем электроприводов Крановые установки (КМУ) — это особый класс оборудования, без которого невозможно реализовать строительный проект любой сложности. Данная техника монтируется на подвижные платформы, и полученные таким способом подвижные манипуляторы активно задействуются для выполнения широкого спектра задач. Крановые установки получили большое распространение с момента их изобретения. В наши же дни они являются неотъемлемой составляющей парка любого предприятия, задействованного в строительной или смежной сфере. Данное оборудование отличается высокой производительностью благодаря тому, что оснащается гидравлическим приводом. Такая особенность конструкции позволяет поднимать и перемещать довольно тяжелые грузы за относительно короткий промежуток времени.  Рис. 24. Крановая установка Стрелочный электропривод — электромеханический переводной механизм, применяемый на железнодорожном транспорте при электрической, диспетчерской и горочной централизациях. Он предназначен для перемещения остряков стрелочного перевода из одного положения в другое, запирания остряков в крайнем положении, получения непрерывного контроля фактического положения стрелки. Установка электропривода производится на специальную гарнитуру, которая крепиться к рельсам с правой или левой стороны стрелочного перевода.  Рисунок 25. Стрелочный перевод Электрокары широко применяются на предприятиях для перевозки грузов внутри цехов (благодаря отсутствию вредных выхлопов), на аэродромах и железнодорожных вокзалах. Большая часть электрокаров отличается компактными габаритами при достаточно высокой грузоподъёмности (от 0,25 до 5 т и более) и часто — колёсами с литыми резиновыми шинами (грузолентами). По конструкции к электрокарам близки электропогрузчики и коммунальные электромобили. В качестве тяговых аккумуляторов используются как кислотные, так и щелочные (никель-кадмиевые).[1] На электрокарах и электропогрузчиках производства XX века (и их аналогах современного выпуска) установлен коллекторный тяговый двигатель, пуск — реостатный, причём на некоторых типах машин регулирование идёт не только за счёт введения реостата, но и за счёт пересоединения секций батареи — при параллельном соединении половин батареи напряжение вдвое ниже, при последовательном соединении напряжение и с ней скорость электрокара возрастают вдвое.[1] В последнее время большое значение приобрели электротягачи (самоходные электротележки) — тягачи, предназначенные для перевозки грузов в пределах предприятия, для средних дистанций перемещения, с частой сменой прицепных устройств (тележки). Важнейшими характеристиками для электротягача являются величина тягового усилия (до 25 т) и габаритные размеры самой электротележки. Имеются электротележки с управлением рычагом вместо руля и контроллером (3 скорости), масса с батареей 1500 кг, разрешённая нагрузка 1500 кг. Электротягачи предназначены для буксировки тяжёлых грузов, крупных габаритов и большой длины. Также электротягачи используются для буксировки техники, которая не имеет самостоятельного хода. Электротягачи управляются оператором стоя или сидя, в зависимости от типа работы внутри или снаружи помещения. Большое распространение электротягачи приобрели в автомобильной промышленности. Расстояния, на которые перемещаются грузы, могут быть разными в зависимости от площади склада, схем размещения складских зон и маршрутов транспортировки. На коротких трассах целесообразно использовать самоходные электротележки, сопровождаемые пешим оператором. При средних расстояниях перевозки и большей интенсивности работ применяют транспортировщики поддонов с платформой или площадкой для оператора. Для перемещения штучных грузов или грузов в прицепных контейнерах применяются электроприводные тягачи и платформенные тележки. Также большое распространение получили электротележки с неподвижной платформой — предназначенные для перевозки грузов в стеснённых условиях по дорогам с твёрдым покрытием на промышленных предприятиях, складах, базах, портах, железнодорожных станциях и т. п. Среди них есть платформенные электротележки, предназначенные для механизации транспортных работ внутри цехов предприятий и складских помещений, перемещения в межстаночном пространстве, для подвоза грузов непосредственно к рабочим местам, габариты таких электротележек позволяют перемещать их в грузовых лифтах. Во время работы водитель-оператор стоит на подпружиненной платформе, при этом можно регулировать высоту, что позволяет работать операторам с различным ростом. Удобная боковая рукоятка гарантирует безопасность работы. Платформа оператора является автоматическим выключателем тягача, при покидании — выходе оператора происходит автоматическое торможение. При этом энергия не расходуется зря, а дополнительно заряжает тяговую батарею посредством рекуперации. Обычно электротягачи широко используются на предприятиях, где необходима горизонтальная комплектация грузов (промышленность, аэропорт, железная дорога, почта). |