порты ввода вывода микроконтроллера. 80С51-К1810ВМ89-ввода-вывода. Общие сведения и технические характеристики специализированного процессора вводавывода К1810ВМ89
 Скачать 4 Mb. Скачать 4 Mb.
|

 AD15-AD0 - входы \ выходы для формирования адресов и передачи данных. Функции этих линий задаются сигналами состояния до S2, SI, SO. Линии находятся в высокоомном состоянии после общего сброса, и тогда, когда шина не используется. Линии AD15—AD8 формируют стабильные (не мультиплексированные) сигналы при пересылках на 8-битовую физическую шину данных и мультиплексируются с данными при пересылках на 16-битовую физическую шину данных (таб 1). A19/S6, A18/S5, A17/S4, A16/S3 - выходы для формирования четырех старших разрядов адресов и сигналов состояний. Сигналы адресов формируются в течение первой части цикла шины (Т1), в остальной части цикла активны сигналы состояний, которые кодируются так: S6=S5=1 - означает ПДП-пересылку; S4=0, что означает ПДП-пересылку; S4=l— цикл шины без ПДП; S3=0—работает канал 1; S3=l—работает канал 2. После такого сброса при отсутствии обращений к шине эти линии находятся в высокоомном состоянии. ВНЕ - выходной сигнал разрешения старшего байта шины данных. Сигнал низкого (активного) уровня формируется процессором, когда байт должен передаваться по старшим линиям D15 — D8. После общего сброса и. при отсутствии обращений к шине этот выход находится в высокоомном состоянии. Сигнал ВНЕ (в отличие от аналогичного сигнала процессоров ВМ86 и ВМ87) может не фиксироваться в фиксаторе адреса, так как он не мультиплексирован с другим сигналом. S2-S0 - выходы для кодирования стояния ВМ89, определяющие действия процессора в каждом цикле работы с шиной. Они кодируются следующим образом: S2S1S0=000—выборка команды из адресного пространства ввода — вывода; 001-чтение данных из адресного пространства ввода—вывода; 010—запись данных в адресное пространство ввода-вывода; 100-выборка команды из системного пространства адресов; 101-чтение данных из системного пространства адресов; 101 — чтение данных из системного пространства адресов; 110-зщапись данных в системное пространство адресов; 111 — пассивное состояние. Код 01l—не используется. С помощью этих сигналов контроллер шины и арбитр шины формируют команды управления памятью и устройствами ввода-вывода. Сигналы формируются в такте Т4 предыдущего цикла, определяя начало нового цикла. По окончании цикла шины в такте Т3 или ТW сигналы возвращаются в пассивное состояние. После общего сброса и при отсутствии обращений к шине выходы S2, SI, SO находятся в высокоомном состоянии. READY — входной сигнал готовности, поступающий от адресуемого устройства, которое оповещает СПВБ о том, что оно готово к пересылке данных. Сигнал синхронизируется в тактовом генераторе К1810ГФ84. LOCK — выходной сигнал монополизации (блокировки) системной шины. Используется в многопроцессорных системах и подается на одноименный вход арбитра шины К1810ВБ89, запрещая доступ к системной шине другим процессорам. Сигнал формируется установкой соответствующего разряда регистра управления канала либо командой TSL. После общего сброса и при отсутствии обращений к шине выход LOCK находится в высокоомном состоянии. RESET — входной сигнал общего сброса (начальной установки) останавливает любые действия СПВБ и переводит его в пассивное состояние до получения сигнала запроса готовности канала. CLK — вход для подачи импульсов синхронизации от генератора тактовых К1810ГФ84. СА — входной сигнал запроса готовности канала. Используется центральным процессором для инициализации СПВВ и определения задания каналам. По срезу сигнала СА опрашивается состояние входа SEL. SEL – входной сигнал, который по первому (после общего сброса) сигналу СА определяет статус (ведущий/ведомый) СПВБ и запускает последовательность инициализации. При поступлении последующих сигналов СА сигнал SEL определяет номер канала (1 или 2), которому предназначено сообщение от ЦП. DRQ1, DRQ2 – входы запросов прямого доступа к памяти от внешних устройств. Сигналы на этих входах сигнализируют СПВВ, что внешнее устройство готово к обмену данными с использованием канала 1 или 2 соответственно. RQ/GT — входной/выходной сигнал запроса/предоставления шины, по которому осуществляется диалог, необходимый для арбитража шины между СПВВ и ЦП в местной конфигурации или между двумя СПВВ в удалённой конфигурации. SINTR1, SINTR2 – выходные сигналы запросов прерываний от каналов 1 и 2 соответственно. Обычно они передаются на вход ЦП через контроллер прерываний К1810ВН59А. Используются для сигнализации о том, что произошли задаваемые пользователем (программистом) события. ЕХТ1, ЕХТ2 — входы сигналов внешнего окончания прямого доступа для каналов 1 и 2 соответственно. Они вызывают окончание текущей ПДП- пересылки в канале, который запрограммирован для анализа окончания ПДП по внешнему сигналу. Структура СПВБ Внутренняя структура СПВВ подчинена его основному назначению - выполнять пересылки данных без непосредственного вмешательства ЦП, который связывается с СПВБ только для инициализации и выдачи задания на обработку. В обоих случаях ЦП предварительно готовит необходимое сообщение в памяти и затем с помощью сигнала запроса готовности канала активизирует СПВБ ВМ89 на выполнение действий, определенных в сообщении. С этого момента СПВВ работает независимо от ЦП. В процессе выполнения задания или по его завершении СПВБ может связаться с ЦП с помощью сигнала запроса прерывания. Процессор может обращаться к памяти и устройствам ввода — вывода (УВВ), размещенным в системном пространстве адресов емкостью 1 Мбайт или в пространство ввода – вывода ёмкостью 64 Кбайт (рис 4.2). Хотя СПВВ располагает только одной физической шиной данных, удобно полагать, что в системное пространство он обращается по системной шине (СШ) данных, а в пространстве ввода — вывода по шине ввода—вывода (ШВВ) данных. Различие между этими двумя шинами состоит в том, что СШ управляет сигналами чтения и записи в память, а ШВВ — сигналами чтения (ввода) и записи (вывода) в УВВ. Таким образом, устройство ввода –вывода, размещенные в системном пространстве, оказываются отображенными на память (реагируют на 20– битовые адреса, закреплённые за ними по командам чтения и записи в память), а память, размещенная в пространстве ввода — вывода, — отображённой на УВВ (адресуемой 16 - битовыми адресами и реагирующий на команды чтения и записи в УВВ).  Рис. 2 Два пространства адресов процессоров ввода-вывода. Указанные шины функционируют по -разному, в зависимости от конфигурации, в которой используется СПВВ. В местной конфигурации (рис. 3 ) СПВВ использует СШ и ШВВ совместно с центральным процессором. Арбитраж по предоставлению шины конкретному процессору осуществляется сигналом запроса/предоставления RQ/GT. В удаленной конфигурации, простейший вариант которой изображен на рис. 3,б, СПВ В безраздельно использует ШВВ, она является её локальной шиной. Доступ к СШ обеспечивается конкретному процессору путем арбитража с привлечением арбитра шин К1810ВБ89 . 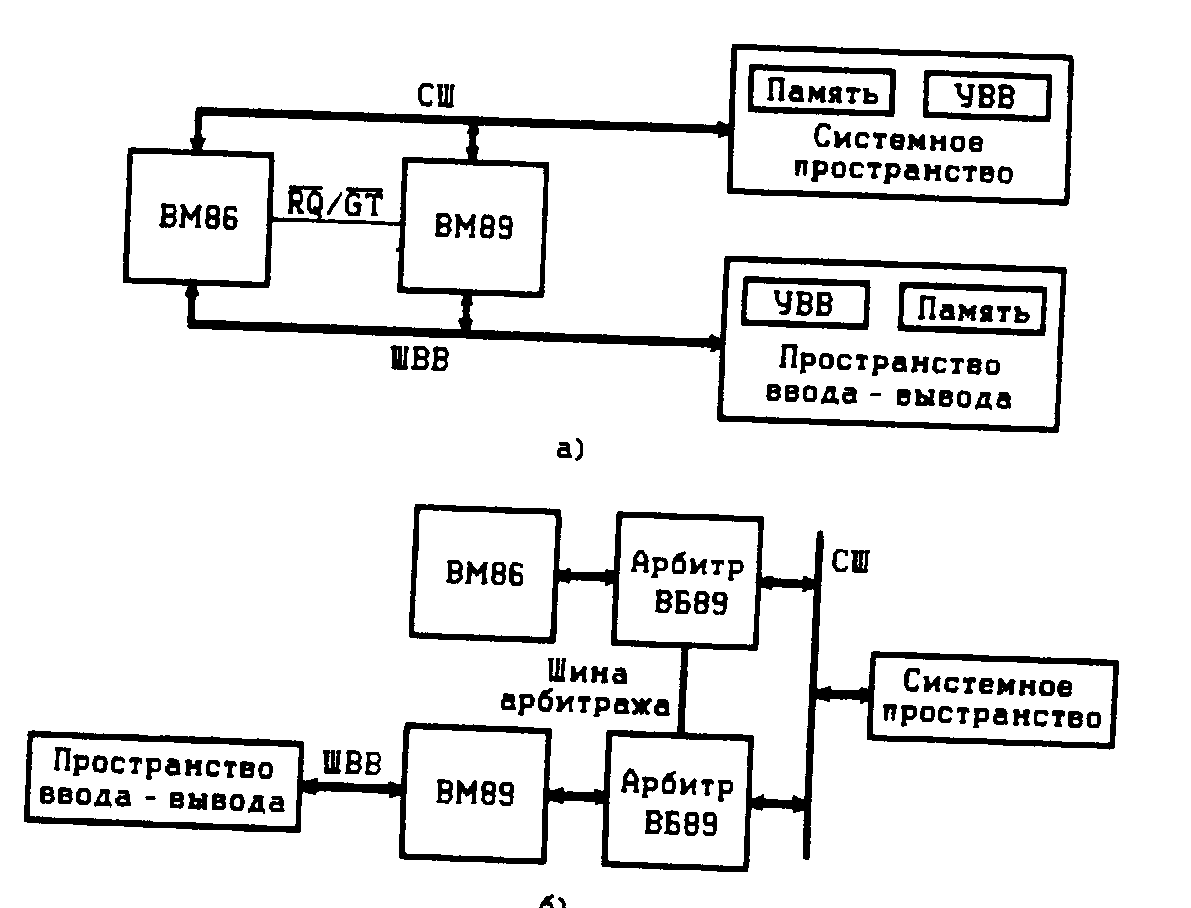 Рис 3. Использование СШ и ШВВ в местной (а) и удалённой (б) конфигурации Структура процессора ввода — вывода (рис 4) включает несколько функциональных узлов, соединённых 20-битовой внутренней шиной для получения максимальной скорости внутренних пересылок. (В отличие от 16-битовой внешней шины по внутренней шине осуществляются пересылки как 16-, так и 20- битовых значений адресов и данных.) Общее устройство управления (УУ) координирует работу функциональных узлов процессора. Все операции (выполнение команд, циклы пересылки с ПДП, ответы на запрос готовности канала и др.), выполняемые СПВВ, распадаются на последовательности элементарных действий, которые называются внутренними циклами. Цикл шины, например, составляет один внутренний цикл; выполнение команды может потребовать нескольких внутренних циклов. Всего насчитывается 23 различных типа внутренних циклов, каждый из которых занимает от двух до восьми тактов CLK (без учета возможных состояний ожидания и времени на арбитраж шин). Общее УУ указывает для каждой операции, какой функциональный узел будет выполнять очередной внутренний цикл. Например, когда оба канала активны, общее УУ определяет, какой канал имеет более высокий приоритет, либо, если их приоритеты равны, осуществляет управление попеременной работой каналов. Кроме того, общее УУ осуществляет начальную инициализацию процессора, для чего используется программно недоступный регистр ССР — указатель блока параметров. 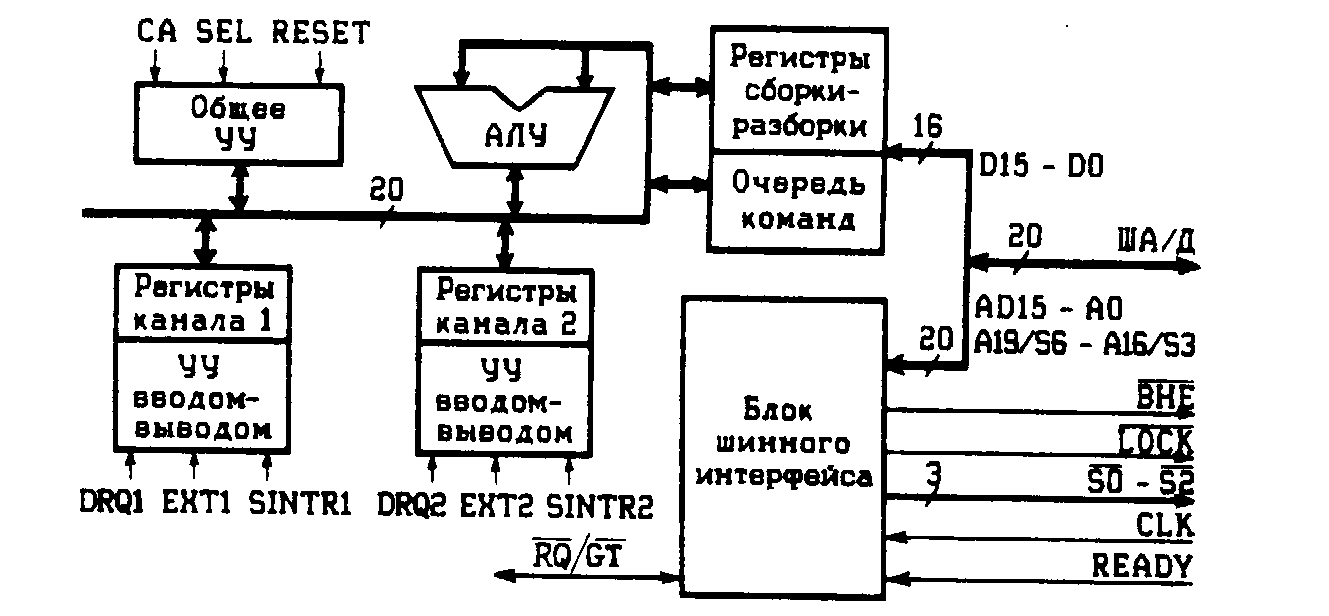 Рис 4. Укрупненная структурная схема СПВБ ВН69 Арифметическое логическое устройство (АЛУ) может выполнять беззнаковые арифметические операции над 8- и 16-битовыми двоичными числами, включающими сложение, инкремент и декремент. Результатом арифметических операций может быть 20 - битовое число. Логические операции, включая И, ИЛИ, НЕ, могут выполняться над 8- и 16-битовыми операндами. Регистры сборки — разборки участвует при передаче всех данных, поступающих в процессор. Когда разрядность источника и приемника данных различаются, процессор использует эти регистры для обеспечения максимальной скорости передачи. Например, при пересылке с ПДП из 8- битового УВВ в 16-битовую память процессор затрачивает два цикла шины на прием двух последовательных байтов, «собирает» их в одно 16-битовое слово и передает его в память за один цикл шины. При передаче 16- битовых данных 8- битовому приемнику осуществляется его предварительная «разборка» на байты. Таким образом, наличие регистров сборки/разборки экономит циклы шины. Очередь команд используется для повышения производительности процессора при выборке их из памяти. Во время выполнения программы каналом команды выбираются из памяти словами, размещёнными по чётному адресу  Рис. 5. Выборка команд с использованием очереди младшего байта. На одну такую выборку затрачивается один цикл шины. Этот процесс показан на рис. 5. Если последний байт текущей команды Х приходится на чётный адрес, то следующий байт за ним байт из нечётного адреса (он является первым байтом команды Y) извлечённого слова в очереди. Когда канал начинает выполнять команду Y, этот байт из очереди извлекается значительно быстрее, чем из памяти. Таким образом, очередь команд размерностью всего один байт позволяет процессору при выборке команд всегда читать слова, что снижает загрузку шины, увеличивая ее пропускную способность и производительность СПВБ. В двух исключительных случаях при извлечении команд процессор читает из памяти байты, а не слова. Во-первых, когда команда передачи управления (например, JMP, JNZ, CALL) указывает на нечётный адрес, по которому размещена команда, требующая исполнения. В этом случае первый байт команды извлекается отдельно. Во-вторых, когда встречается 6-байтовая команда LPDI, которая извлекается в следующем порядке: байт — слово — байт — байт — байт, и очередь не используется. Когда используется 8-битовая шина для передачи команд процессору, читаются только байты, а очередь не используется и каждая выборка требует одного цикла шины. Блок шинного интерфейса (ВШИ) осуществляет управление и определяет циклы шины, связанные с выборкой команд и передачей данных между СПВВ и памятью или УВВ. Каждое обращение к шине связано с битом регистра этикеток (регистр TAG находится в каждом канале), который указывает, к какому пространству адресов (системному или ввода — вывода) относится обращение. БШИ выставляет тип цикла шины (выборка команды из пространства адресов ввода — вывода, запись данных в память системного пространства и т.д.) в виде кода состояния на выходах S2 — S0 (табл. 2). Системный контроллер К1810ВГ88 декодирует этот код, выбирая нужную шину (СШ/ ШВВ) и формируя соответствующую команду (чтение, запись и т.д.). Затем БШИ определяет соотношение между логической и физической шириной СШ и LLIBB. Физическая ширина каждой шины фиксирована в системе и сообщается процессору или его инициализации.
Таблица 2. В системной конфигурации обе шины (СШ и ШВВ) должны иметь одинаковую ширину: 8 или 16 бит, что определяется типом ЦП (ВМ86/ВМ88). В удаленной конфигурации СШ процессора ввода — вывода должна иметь ту же физическую ширину, что и СШ центрального процессора системы. Ширина ШВВ процессора ввода — вывода может быть выбрана независимо. Если в пространстве ввода — вывода используются какие-либо 16-битовые УВВ, должна использоваться 16- битовая ШВВ. Если в пространстве ввода — вывода все УВВ 8-битовые, то может быть выбрана 8- либо 16-битовая ШВВ. Преимущественно имеет 16- битовая ШВВ, поскольку она позволяет подключать к системе дополнительные 16-битовые УВВ, а также обеспечивает более эффективную выборку команд программы, размещенной в пространстве ввода — вывода. Для ПДП-пересылки в программе канала задается логическая ширина СШ и ШВВ независимо для каждого канала. Логическая ширина 8-битовой физической шины может быть только 8- битовой, а для 16- битовой физической шины логическая ширина может быть задана 8- либо 16-битовой. Это позволяет обслуживать 8- и 16-битовые УВВ с помощью одной 16-битовой физической шины. В табл. 3 перечислены все возможные отношения между логической и физической шириной СШ и ШВВ в местной и удаленной конфигурации. Таблица 3
Логическая ширина шины учитывается только при ПДП - пересылках. Извлечение команд, а также запись и чтение операндов осуществляются словами или байтами только в зависимости от физической ширины шины. Наряду с управлением пересылками команд и данных блок шинного интерфейса осуществляет арбитраж локальных шин. В местной конфигурации БШИ использует линию RQ/GT для запроса шины у ЦП и ее возвращения после использования, в удаленной конфигурации — для координации совместного использования локальной ШВВ с другими процессорами ВМ89 или локальным ЦП ВМ86, если они имеются. Арбитраж СШ в удаленной конфигурации осуществляется арбитром К1810ВБ89. В тех случаях, когда необходимо монополизировать СШ, блок шинного интерфейса формирует нулевой активный сигнал LOCK. Это бывает в двух случаях: 1) когда канал выполняет команду TSL (Test and Set Lock — проверка с монополизацией); 2) когда в программе канала есть указание активизировать LOCK на время ПДП- пересылки. Структура каналов процессора ввода — вывода. Процессор ВМ 87 (см. рис. 4) включает два идентичных канала. Каждый канал может осуществлять ПДП- пересылку, выполнять программу, отвечать на запросы готовности или простаивать. Эти действия каналы могут выполнять независимо друг от друга, что позволяет рассматривать СПВВ ВМ89 как два устройства: канал 1 и канал 2. Каждый канал состоит из двух основных частей: устройства управления вводом — выводом и группы регистров, часть которых используется в программах, а часть из них является программно- недоступными. Устройство управления вводом — выводом управляет действиями канала во время ПДП- пересылки. При выполнении синхронной пересылки оно ожидает поступления сигнала синхронизации на входе DRQ, прежде чем выполнить очередной цикл чтения — записи. Когда ПДП- пересылка должна заканчиваться по внешнему сигналу, устройство следит за его появлением на входе EXT. Между циклами чтения и записи (пока данные находятся в СПВБ) канал может производить подсчёт числа переданных данных, перекодировать их и сравнить с заданным кодом. Основываясь на результатах этих действий, УУ вводом — выводом может прекратить ПДП- пересылку. В процессе выполнения программы по команде SINTR устройство генерирует запрос прерывания в ЦП. Часто запрос используется для того, чтобы сообщить ЦП о завершении программы канала. Регистры канала используются СПВБ как при ПДП- пересылках, так и при выполнении программы. Все регистры канала (рис. 6), за исключением TAG, непосредственно принимают участие в указанных процессах. Использование каждого регистра описано в табл. 4. Таблица 4
Регистр общего назначения GA служит в большинстве команд в качестве операнда. В качестве базового он используется для указания адреса операнда, находящегося в памяти. Перед началом ПДП- пересылок программа канала загружает в GA адрес источника или приемника данных. Регистр общего назначения GB функционально взаимозаменяем с регистром GA. Если GA загружен адресом источника ПДП- пересылки, то GB должен быть загружен адресом приёмника, и наоборот. Регистр общего назначения GC используется программой канала как операнд или базовый регистр. Используется при выполнении ПДП - пересылок, когда осуществляется перекодировка данных. В этом случае, перед началом пересылки, программа канала загружает в GC начальный адрес таблицы перекодировки. В процессе пересылки его содержимое не изменяется. Указатель команд ТР загружается начальным адресом программы в процессе инициализации канала общим УУ на выполнение задания. Во время выполнения программы (задания от ЦП) ТР играет роль счетчика команд. Так как ВМ89 не содержит указателя стека и не может выполнять стековых операций, возврат из программы осуществляется путём загрузки в TP адреса возврата, который запоминается в памяти по команде CALL. Указатель задания является полностью программно-доступным (в отличие от регистра IP в ВМ86) и может использоваться программой как регистр общего назначения или базовый.  Рис 6. Регистры канала Рис. 7 Использование процессора в\в регистра МС для мас- кированного сравнения Однако делать это не рекомендуется, так как программа становится трудной для понимания. Указатель блока параметров РР загружается общим УУ начальным адресом блока параметров в процессе инициализации канала на выполнение задания. В подготовленном сообщении расположение блока параметров в памяти определяет центральный процессор (см. табл. 4). Программа канала не может изменить содержимое регистра PP. Его удобно использовать как базовый для пересылки данных в блок параметров. Для ПДП- пересылок регистр РР не используется. Индексный регистр IX используется программой канала как регистр общего назначения. Он может также использоваться в качестве индексного регистра для адресации операндов, находящихся в памяти. В качестве разновидности индексной адресации, с помощью IX можно задать индексную адресацию с автоинкрементном, которая очень удобна при обработке массивов данных. Для ПДП - пересылок регистр IX не используется. Счетчик байтов ВС в программе канала служит регистром общего назначения. При ПДП- пересылке подсчитывает число пересланных байтов путём декрементирования значения, загруженного перед ее началом. Если пересылка должна заканчиваться по заданному числу пересланных байтов, то УУ вводом — выводом закончит её, когда содержимое ВС станет равным нулю. Регистр маскированного сравнения МС в программе канала может использоваться как регистр общего назначения или для маскированного сравнения. При ПДП- пересылке используется для маскированного сравнения. Маскированное сравнение позволяет сравнить выделенные разряды байта (операнда команды или пересылаемого байта) с заданным заранее значением. Для этого в старший байт МС загружается маска, выделяющая интересующие разряды, а в младший—сравниваемое значение (рис. 7). В программе, при выполнении команды условного перехода по маскированному сравнению (либо при ПДП- пересылке), определенный в ней операнд (либо пересылаемый байт) сравнивается с замаскированным значением. Регистр управления каналом СС используется в основном при ПДП- пересылках. Он служит для определения условий пересылки и указывает способ её окончания. Структура и обозначение управляющих полей СС представлены на рис. 8. Пять старших полей определяют условие ПДП- пересылки: F (пересылка) определяет, откуда и куда пересылаются данные; TR (перекодировка) — следует ли пересылаемые данные перекодировать; SYN (синхронизация) — способ синхронизации пересылки; S (источник) — в каком регистре (GA или GB) находится адрес источника; L (монополизация) — следует ли активизировать сигнал во время пересылки. Четыре младших поля задают способ окончания пересылки: TS указывает, что пересылка состоит в передаче только одного данного; ТХ—что пересылка должна заканчиваться по внешнему сигналу (ЕХТ); ТВС — по нулю в счетчике байтов (ВС); TMC — по результатам маскированного сравнения.  Рис 8. Регистр управления каналом Поле С не используется для ПДП-пересылок, а служит удобным средством управления приоритетом программы канала. Таблица 5
Кодирование полей ТХ, ТВС и ТМС позволяет выбрать смещение 0, 4 или 8 по окончанию ПДП-пересылки. Выбранное значение добавляется к содержимому счетчика команд ТР и определяет три различных точки программы, в которые передается управление после окончания пересылки (рис.9). Окончание по одиночной пересылке TS == 1 всегда приводит к нулевому смещению. 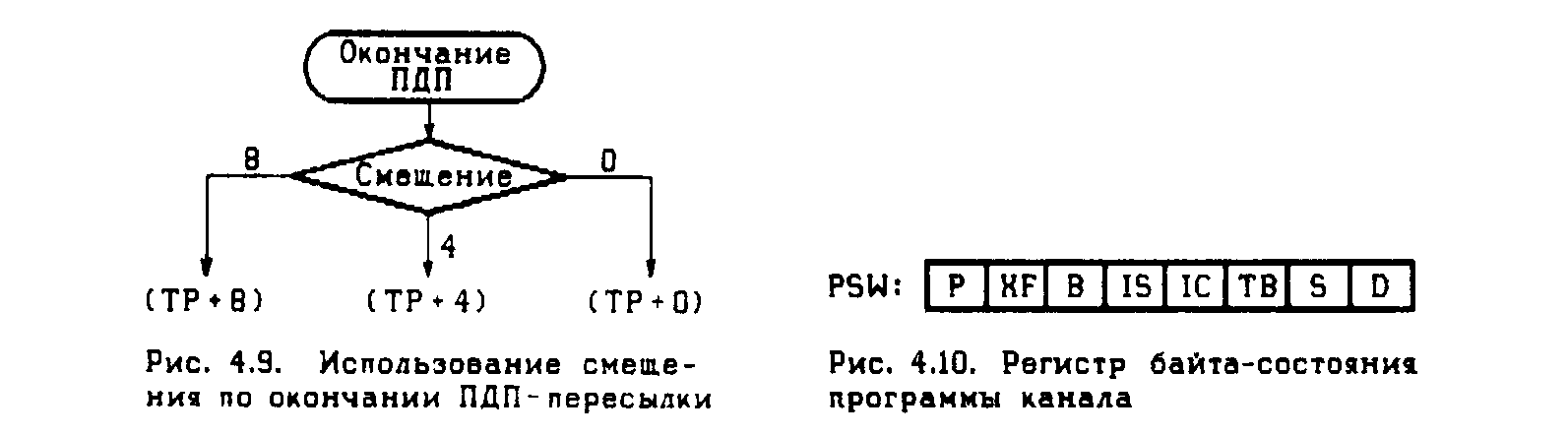 Рис. 9 Использование смещения Рис. 10 Регистр байта- по окончании ПДП-пересылки. состояния программы. В регистре ТАG каждый бит соответствует одному из 4-х регистров: GA, GB, GC и ТР (см. рис. 6). Когда они используются в качестве базовых или указателей (см. табл. 5), то бит TAG определяет, к какому пространству адресов (системному или в\в) относится адрес, размещенный в соответствующем регистре. Значение бита TAG=0 показывает, что адрес относится к системному пространству (20-битовый адрес); TAG=1 указывает на пространство в\в (16-битовый адрес); Общее УУ устанавливает или сбрасывает бит регистра TAG, соответствующий ТР, в зависимости от того, в каком адресном пространстве размещена программа канала. Когда GA, GB и GC используются в качестве регистров общего назначения, соответствующий бит регистра TAG устанавливается по-разному при выполнении различных групп команд (см. табл. 5). Восьмибитовый регистр PSW, имеющийся в каждом канале, хранит слово-сочетание программы В регистре РSW заносится информация о текущем состоянии канала (рис. 10). Логическая ширина шины приемника равна 8 бит при D = 0 и 16 бит при D= 1. Логическая ширина шины источника равна 8 бит устанавливается в единицу. При управлении выдачей запроса прерывания 1С устанавливается в нуль, когда прерывание запрещено, и в единицу, когда оно разрешено. Если канал выдал запрос прерывания, то IS=1, если не выдал -IS=0. Бит В=1 задает режим предельной загрузки шины. Бит XF=1, когда канал выполняет ПДП-пересылку. Бит Р задает приоритет канала. Эта информация позволяет в любой момент приостановить работу канала, записав значение PSW и ТР в память, а затем возобновить его работу, считав PSW и ТР. Генератор тактовых импульсов К1810 ГФ84 Генератор тактовых импульсов (ГТИ) КР1810ГФ84 предназначен для управления ЦП КР 1810ВМ86 и периферийными устройствами, а также для синхронизации сигналов READY с тактовыми сигналами ЦП и сигналов интерфейсной шины Multibus. Генератор тактовых импульсов (рис. 11, 12) включает схемы формирование тактовых импульсов (OSR, CLK, CLK) , сигнала сброса (RESET) и сигнала готовности (READY); Cхема формирования тактовых импульсов вырабатывает сигналы: CLK,-тактовой частоты для управления периферийными БИС, OSC — тактовой частоты задающего генератора, необходимые для управления устройствами, входящими в систему, и для синхронизации. Сигналы синхронны, их частоты связаны соотношением: Eefi = 3FCLK= 6Fpclk режиме внутреннего генератора. 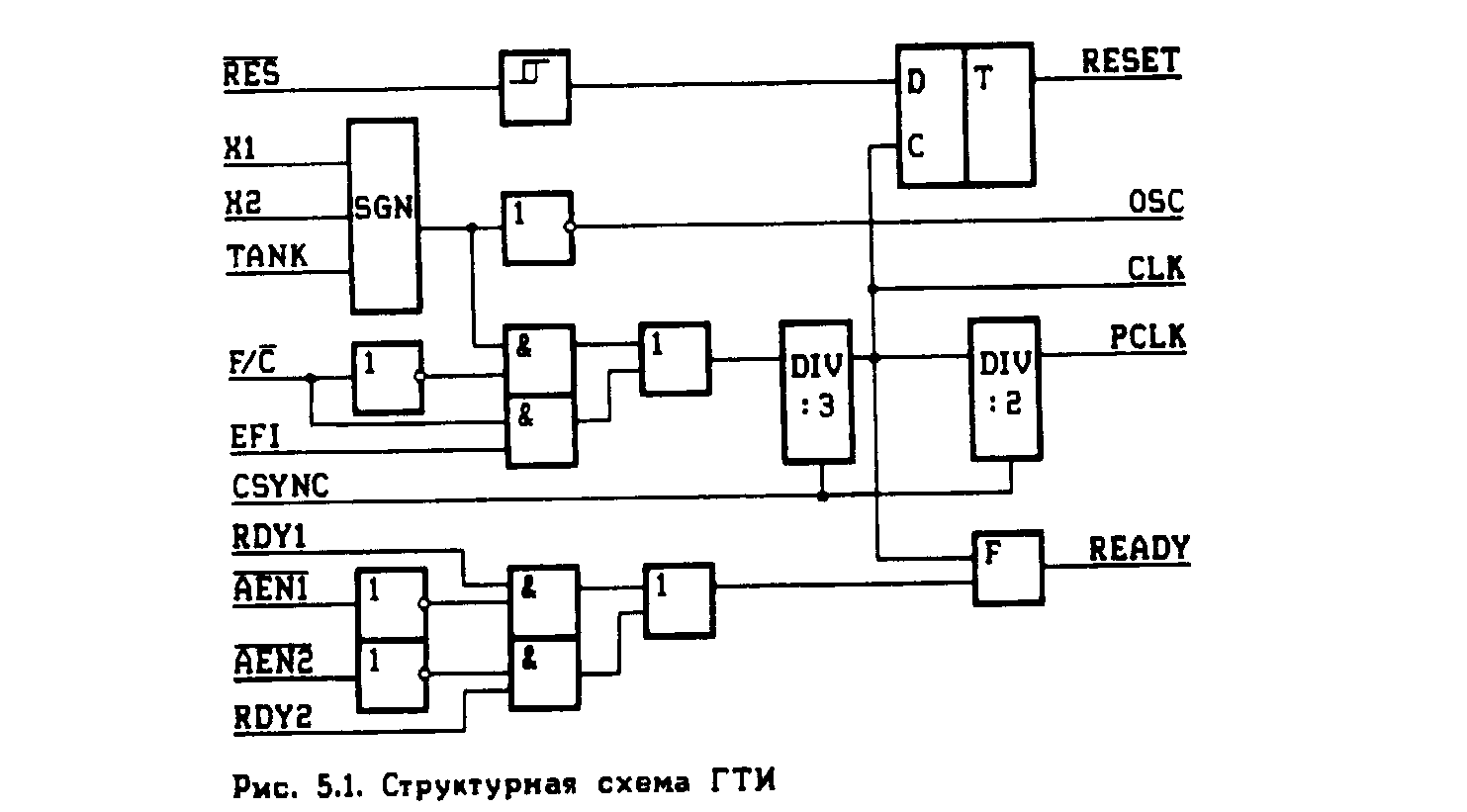 Рис 11 Структура ГТИ. Сигналы могут формироваться из колебаний основной частоты кварцевого резонатора, подключаемого к входам XI, Х2, или третьей гармоники кварцевого резонатора, выделяемой ДС-фильтром или от внешнего генератора, подключаемого ко входу EFI. Выбор режима функционирования определяется потенциалом на входе F/C. Если этот вход подключен к «земле», то ГТИ работает в режиме формирования сигналов от внутреннего генератора (SGN),если на F/C подается высокий потенциал - то в режиме формирования сигналов от внешнего генератора. Схема формирования сигнала сброса RESET имеет на входе триггер Шмидта, а на выходе — триггер, формирующий фронт сигнала RESET по срезу CLK. Обычно ко входу RES подключается RC-цепь, обеспечивающая автоматическое формирование сигнала при включении источника питания (рис. 13).  Рис.12 Условное графическое обозначение ГТИ. Рис. 13 Схема подключения к ГТИ кварцевого резонатора Схема формирования тактовых импульсов имеет специальный вход синхронизации (CSYNC), с помощью которого возможно синхронизировать работу нескольких ГТИ, входящих в систему. Такая синхронизация осуществляется с помощью двух D-триггеров по входам СSYNC и EFI (рис. 14). Следует отметить, что если ГТИ работает в режиме внешнего генератора, то внутренний генератор может работать независимо (вход OSC независим от CLK и PCLK и асинхронен им).  Рис. 14. Схема формирования сигнала CSYNC. Схема формирования сигнала готовности (READY). Входной сигнал READY ЦП КР1810ВМ86 используется для подтверждения готовности к обмену. Высокий уровень напряжения на входе указывает на наличие данных в ШД. Схема формирования этого сигнала в ГТИ построена так, чтобы упростить включение системы в интерфейсную шину стандарта Multibus, и имеет две пары идентичных сигналов RDY1, AEN1, и RDY2, AEN2, объединенных схемой ИЛИ. Сигналы RDY формируются элементами, входящими в систему, и свидетельствуют об их готовности к обмену. Сигналы AEN разрешают формирование сигнала READY по сигналам RDY, подтверждая адресацию к адресуемому элементу. Выходной элемент (F) схемы формирует фронт сигнала READY по срезу СLK, чем осуществляется привязка сигала READY и тактами ЦП. Временная диаграмма работы ГТИ представлена на рис. 14.  Рис. 14 Временная диаграмма ГТИ Контроллер накопителя на гибком магнитном диске К580ВГ72 Контроллер накопителя на гибком магнитном диске (КНГМД) КР 580ВГ72 реализует функцию управления 4 накопителями на гибких магнитных дисках, обеспечивая работу в формате с одинарной FM и с двойной MFM плотностью, включая двустороннюю запись на дискету. Он имеет схему сопряжения с процессором, ориентированную на системную шину микропроцессоров серий К580, К1810, К1821; обеспечивает многосекторную и многоканальную передачу объемов данных, задаваемых программно как в обычном режиме, так и в режиме ПДП; имеет встроенный генератор и схему, упрощающую построение контура фазовой автоподстройки. Назначение выводов. RESET — сброс. Выходной сигнал, устанавливающий контроллер в исходное состояние. RD- чтение. Сигнал RD=0 определяет операцию чтения данных из контроллера. WR-запись. Сигнал WR=0 определяет операцию записи данных в контроллер. CS-выбор кристалла. Разрешение обращения к контроллеру. Сигнал CS=0 разрешает действие сигналов RD и WR. А0-выходной сигнал, разрешающий обращение либо к регистру состояний (А0=0), либо к регистру данных (А0=1). DB7 — DBO — двунаправленная шина данных. DRQ – запрос на ПДП. Сигнал DRQ=1 определяет запрос на ПДП ЦП. DACK — подтверждение ПДП. Сигнал от ЦП, сообщающий контроллеру о том, что шины ЦП находятся в z-состоянии. ТС — окончание ПДП. Сигнал ТС= 1 сообщает контроллеру об окончании циклов ПДП. IDX — индекс, признак обнаружения начала дорожки. INT --- сигнал запроса прерывания ЦП от контроллера. CLK — вход, подключаемый к генератору (4 или 8 МГц). WR CLK — синхроимпульсы записи. Вход, подключаемый к генератору частотой F=500 КГц при одинарной плотности и F=l МГц при двойной, с длительностью положительного полупериода 250 нс в обоих случаях. Сигналы должны быть инициированы для режимов как записи, так и чтения. DW ---- информационное окно, вырабатывается схемой фазовой автоподстройки и используется для выбора данных с дисковода. RD DATA --- линия приема входных данных с дисковода в последовательном коде. VCO — синхронизация, выходной сигнал контроллера, участвующий в формировании «окна» в схеме фазовой автоподстройки. WE — разрешение записи, сигнал записи данных на дискету. MFM --- выбор режима плотности записи. Сигнал MFM=1 определяет двойную плотность, MFM=0—одинарную. HD SEL—выбор головки. Сигнал HD SEL=1 определяет работу с головкой 1; HD SEL = 0 — работу с головкой 0. DSI, DSO— выбор устройства, выходные сигналы, обеспечивающие адресацию к одному из четырех дисководов. WR DATA — линия вывода данных в последовательном коде. PSI, PSO—предкомпенсация, выходные линии, передающие код предварительного сдвига в режиме MFM FLT/TRKO — отказ/дорожка 0, указывает на сбой при операциях обмена или выбора дорожки 0 в режиме поиска. WP/TS — защита записи/двусторонний, входной сигнал, определяющий режим записи при операциях обмена или режим поиска информации с двух сторон дискеты. RDY — сигнал готовности дисковода. HDL — загрузка головки, выходной сигнал начальной установки головки дисковода. FD/STP - сброс отказа/шаг, осуществляет сброс ошибки в режиме обмена и обеспечивает переход головки на следующий цилиндр. LCT/DIR – малый ток / направление, определяет направление движения головки. RW/SEEK – запись/чтение/поиск, определяет направление движения головки в режиме поиска, единичный сигнал означает увеличение, нулевой — уменьшение. Ucc - шина питания. GND — общий. Структурная схема контроллера (рис 15,16) включает три функциональных блока: буфер шины данных, обеспечивающий связь контроллера с ЦП и вырабатывающий запросы на прерывание и ПДП; блок управления накопителями на НГМД, принимающий и вырабатывающий сигналы для управления накопителями, и блок управления контроллером.  Рис 15. Структурная схема контроллера НГМД ВГ72 Блок управления контроллером включает несколько регистров специального назначения. Регистр входных/выходных данных RIO адресуется при А0=1 и доступен для чтения и записи со стороны ЦП. С помощью этого регистра осуществляется обмен данными между контроллером и ЦП, а также служебной информацией — загрузкой команды и чтением из регистров состояний и указателей. Запись и чтение служебной информации осуществляется в определенной последовательности, в соответствии со структурой команд. Основной регистр состояния RS доступен только для операций чтения и содержит разряды, определяющие состояние контроллера по взаимодействию с НГМД и ЦП. Формат слова состояния RS показан на рис. 17. Содержимое его можно прочитать в любое время по команде ввода с адресом, формирующим сигнал А0=0. Разряды D3 — DO указывают на выполнение команды поиска; D4 — на выполнение контроллером операции чтения/записи; D5 используется для режима прерывания и указывает на завершение операции обмена данными между контроллером и ЦП, D6 определяет направление передачи данных (от ЦП или к ЦП); D7 устанавливается при готовности регистра данных RIO принять или передать данные. Входной регистр RI и выходной регистр RO – регистры приема/передачи данных в последовательном коде. Программно они недоступны. При приеме данных от накопителя данные отделяются от импульсов синхронизации с помощью «окна данных» DW, которое формируется с помощью внешней схемы фазовой автоподстройки и сигнала синхронизации VCO. При выдаче данных используются сигнал разрешения записи WE и линия управления током записи. Кроме того, для синхронизации работы выходных регистров с работой дисковода используется внешний генератор, формирующий импульсы записи WR CLK. Скорость приема/передачи байта составляет 32 мкс (по 4 мкс на бит). Рис. 16. Условное графическое обозначение КНГМД 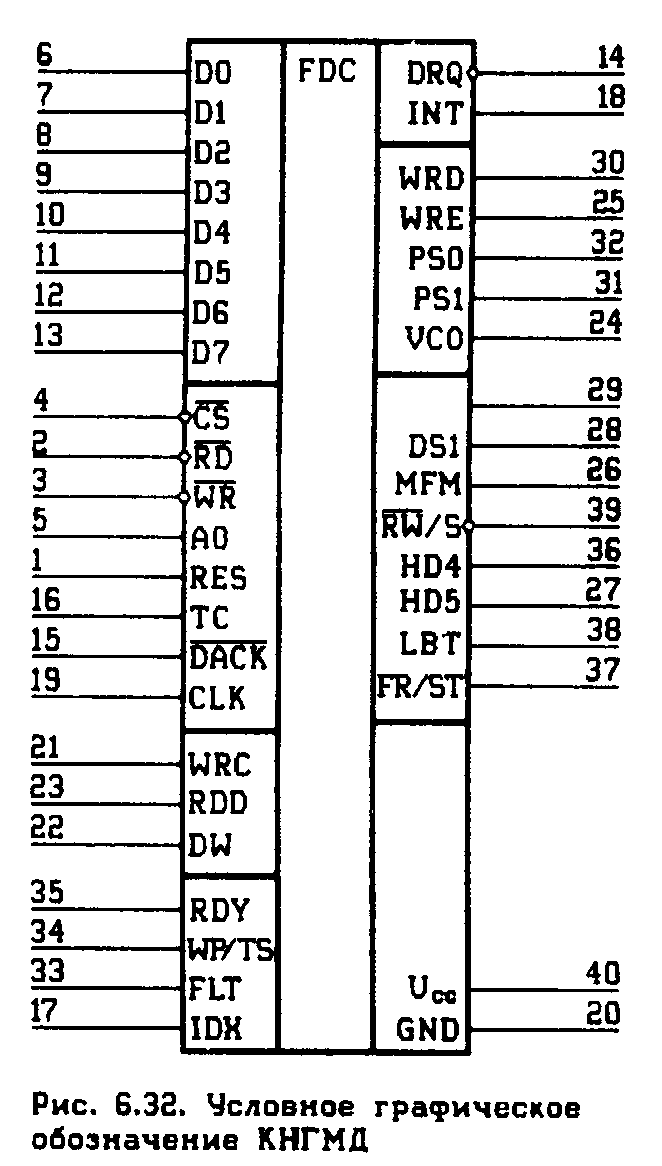 Прием/передача данных может осуществляться контроллером в двух режимах: ПДП и прерывания. В режиме ПДП необходимо дополнительно использовать контроллер ПДП К1810ВГ37, вырабатывающий сигнал запроса на ПДП DRQ и принимающий сигналы подтверждения DACK и конца ПДП (ТС). В режиме прерывания контроллер формирует сигналы запроса на прерывание INT при пересылке каждого байта между контроллером и ЦП, предоставляя возможность управления обменом подпрограмме ЦП.  Рис 17. Формат слова - состояния. Кроме перечисленных регистров контроллер имеет блок регистров BRC для хранения кода команды и служебной информации (атрибутов), необходимой для выполнения команд. В блоке BRC можно выделить четыре регистра (ST3 — STO), несущие информацию о состоянии контроллера и дисковода при выполнении команд. Кроме того, контроллер имеет схему обнаружения адресного маркера, что упрощает реализацию контура фазовой автоподстройки. Модемы 1.Введение В последнее время модемы становятся неотъемлемой частью компьютера. Установив модем на свой компьютер, вы фактически открываете для себя новый мир. Ваш компьютер превращается из обособленного компьютера в звено глобальной сети. Модем позволит вам, не выходя из дома, получить доступ к базам данных, которые могут быть удалены от вас на многие тысячи километров, разместить сообщение на BBS (электронной доске объявлений), доступной другим пользователям, скопировать с той же BBS интересующие вас файлы, интегрировать домашний компьютер в сеть вашего офиса, при этом (не считая низкой скорости обмена данными) создается полное ощущение работы в сети офиса. Кроме того, воспользовавшись глобальными сетями (RelCom, FidoNet) можно принимать и посылать электронные письма не только внутри города, но фактически в любой конец земного шара. Глобальные сети дают возможность не только обмениваться почтой, но и участвовать во всевозможных конференциях, получать новости практически по любой интересующей вас тематике. Существует три основных способа соединения компьютеров для обмена информацией: непосредственная связь, через асинхронный порт; связь с использованием модема; связь через локальные сети. В реферате рассматривается первые два типа соединений - непосредственное и соединение через модем. 2.Последовательный асинхронный адаптер Практически каждый компьютер оборудован хотя бы одним последовательным асинхронным адаптером. Обычно он представляет собой отдельную плату или же расположен прямо на материнской плате компьютера. Его полное название - RS-232-C. Каждый асинхронный адаптер обычно содержит несколько портов, через которые к компьютеру можно подключать внешние устройства. Каждому такому порту соответствует несколько регистров, через которые программа получает к нему доступ, и определенная линия IRQ (линия запроса прерывания) для сигнализации компьютеру об изменении состояния порта. Каждому порту присваивается логическое имя (COM1,COM2,и т.д.). Интерфейс RS-232-C разработан ассоциацией электронной промышленности ( EIA ) как стандарт для соединения компьютеров и различных последовательных периферийных устройств. Компьютер IBM PC поддерживает интерфейс RS-232-C не в полной мере; скорее разъем, обозначенный на корпусе компьютера как порт последовательной передачи данных, содержит некоторые из сигналов, входящих в интерфейс RS-232-C и имеющих соответствующие этому стандарту уровни напряжения. В настоящее время порт последовательной передачи данных используется очень широко. Вот далеко не полный список применений: подключение мыши; подключение графопостроителей, сканеров, принтеров, дигитайзеров; связь двух компьютеров через порты последовательной передачи данных с использованием специального кабеля и таких программ, как FastWire II или Norton Commander; подключение модемов для передачи данных по телефонным линиям; подключение к сети персональных компьютеров; Последовательная передача данных означает, что данные передаются по единственной линии. При этом биты байта данных передаются по очереди с использованием одного провода. Для синхронизации группе битов данных обычно предшествует специальный стартовый бит, после группы битов следуют бит проверки на четность и один или два стоповых бита. Иногда бит проверки на четность может отсутствовать. Использование бита четности, стартовых и стоповых битов определяют формат передачи данных. Очевидно, что передатчик и приемник должны использовать один и тот же формат данных, иначе обмен не возможен. Другая важная характеристика - скорость передачи данных. Она также должна быть одинаковой для передатчика и приемника. Скорость передачи данных обычно измеряется в бодах ( по фамилии французского изобретателя телеграфного аппарата Emile Baudot - Э.Бодо). Боды определяют количество передаваемых битов в секунду. При этом учитываются и старт/стопные биты, а также бит четности. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||