лот. Пояснювальна записка Другий (магістерський) (рівень вищої освіти)
 Скачать 4.57 Mb. Скачать 4.57 Mb.
|

|
k-means та метод інтерактивної побудови мережі. РОЗДІЛ 1 ОГЛЯД ТА АНАЛІЗ СУЧАСНОГО СТАНУ ПРОБЛЕМИ СТРУКТУРНО-ТОПОЛОГІЧНОЇ ОПТИМІЗАЦІЇ КОМП’ЮТЕРНИХ МЕРЕЖ РОБОТИЗОВАНИХ СИСТЕМ В наш час комп’ютерні мережі стали головним атрибутом більшості сучасних підприємств. Успішно застосовувати передові інформаційні технології дозволяють сучасні програмні та технічні засоби. Для їх використання випадку важливо знати всю інформацію про сучасні мережеві технології та їх можливості. Важливо враховувати, що підвищення продуктивності при збереженні достатньої якості продукції є одним з основних критеріїв підтримки конкурентоспроможності. Для підвищення продуктивності підприємств зазвичай проводиться автоматизація та роботизація виробничого процесу. Додавання роботизованих елементів системи зазвичай викликають необхідність під’єднання у систему комп’ютеризованих об’єктів та комп’ютерів, які необхідно зв’язувати між собою у комп’ютерні мережі. Завдання ефективного проектування комп’ютерних мереж у складі роботизованих систем є актуальним, оскільки вдало обрана та спроектована топологія має більш суттєвий вплив на стабільність мережі, ніж функціонування технологій фізичного рівня. 1.1 Огляд роботизованих систем як об’єктів керування Сучасний рівень промислового виробництва характеризується інтенсивним впровадженням автоматизованої техніки, яка побудована на використанні електронних систем програмного керування. До такої техніки відносять промислові роботи. Їх комплексне використання дозволяє оперативно вирішувати задачу випуску продукції у великих кількостях, що є головною особливістю функціонування виробництва в ринкових умовах. Проте необхідно знати деяк особливості роботизованих систем, також існує чимало видів роботизованих систем та сфери їх використання різноманітні. Незважаючи на те, усі вони мають три основні подібності: всі роботи мають деякий вид механічної конструкції – рами, призначеної для досягнення певного завдання, також роботи мають електричні складники. Також необхідно знати, що всі роботи мають деякий рівень комп'ютерного програмування. Програма вирішує коли і як робот повинен виконувати свої завдання. Він може мати оптимальну механічну і електричну конструкцію, але якщо його програму погано розроблено – його продуктивність буде дуже низькою. Існує три види роботизованих програм: дистанційне керування, штучний інтелект та гібрид. Робот з дистанційним програмованим керуванням має раніше встановлений набір команд і буде їх виконувати. Роботи, що використовують штучний інтелект, взаємодіють з навколишнім середовищем без джерела керування, і можуть детерміновано реагувати на проблеми, з якими вони стикаються. Гібрид, є формою програмування що об’єднує обидві функції. Гнучкість роботизованих систем є важливим критерієм у процесі автоматизації та роботизації виробничих процесів. Під гнучкістю розуміють здатність без будь-яких суттєвих змін техніки, технології та організації виробництва забезпечувати освоєння нових виробів в найкоротший термін і з мінімальними затратами праці та матеріальних ресурсів незалежно від зміни конструктивних і технологічних характеристик виробів [1]. Виділяють декілька основних технологій гнучкого виробництва: жорстка технологія виробництва для виготовлення однієї категорії деталей; технології виробництва, яка може перебудовуватись, отже обладнання може використовуватись для виготовлення нового виробу; переналагоджувальні технологічні процеси та обладнанні, призначені для одночасного випуску групи деталей, де щоб перейти на виготовлення деталей конкретного типу, потрібна перебудова, регулювання окремих вузлів, а також заміна деяких пристроїв з наявного комплекту; гнучка технологія виробництва та обладнанні, пристосована до високого рівня автоматизації, у якій для переходу на випуск нового виробу переналагодження не потрібно. Промислові роботизовані системи – це гнучкі виробничі модулі, які дозволяють автоматизувати основні технологічні процеси. Роботизовані системи, або як їх ще називають, промислові роботи, набули найширшого застосування у виробничій сфері. На сьогоднішній день це найбільш ефективний засіб комплексної механізації і автоматизації технологічних процесів [2]. До основних переваг використання промислових роботів відносять: зростання продуктивності праці; підвищення якості продукції; зниження витрат на виробництво однієї одиниці товару; збільшення точності і повторюваності виконання операцій; зменшується вплив людського фактору. Спектр вирішуваних завдань В складально-монтажному виробництві роботів використовують для виконання наступних завдань: установка елементів; загвинчування гвинтів, шурупів, гайок; дозоване нанесення на заготовки різних матеріалів; гравірування написів, логотипів і заводських знаків на різних поверхнях; фрезерування перемичок на групових заготовках для поділу на окремі друковані плати. Додаткова установка різних робочих інструментів (шуруповерти, шпинделі, дозуючі головки тощо) дозволяє значно розширити функціонал промислових роботів. 1.2 Огляд комп’ютерних мереж у складі роботизованих систем Роботизовані системи застосовуються сьогодні практично у всіх областях виробництва, що збільшує необхідність у проектуванні комп’ютерних мереж для їх зв’язку та управління. 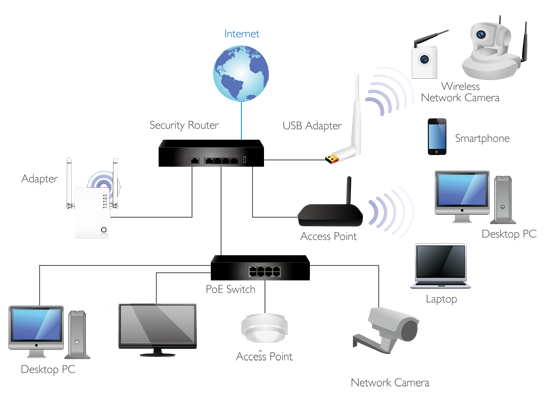 Рисунок 1.1 – Приклад структури комп’ютерної мережі Під комп’ютерною системою розуміють систему, що складається з необмеженої кількості комп’ютеризованих елементів, комп’ютерів, серверів, мережевих адаптерів (рисунок 1.1) та забезпечує обмін файлами між користувачами мережі та використання загальних ресурсів: великого простору дискової пам'яті, принтерів, централізованої бази даних, програмного забезпечення та інших. Особливість даного виду комунікації полягає в тому, що всі елементи мережі незалежно від розташування отримують доступ до внутрішньої інформації та баз даних, можуть її обробляти і передавати один одному. За масштабом роботизовані системи зазвичай об’єднують у локальні або глобальні комп’ютерні мережі. Локальна мережа покриває зазвичай відносно невелику територію або невелику групу будівель (цех, роботизована лінія, ділянка виробництва тощо). Користувачів локальної мережі прийнято називати робочими групами, а комп'ютери, за якими вони працюють – роботизованими робочими станціями [3]. У кожного комп’ютера в такій мережі є своє ім'я. Члени робочої групи можуть звертатися за цими іменами до ПК своїх колег і копіювати файли на свій комп'ютер або копіювати свої файли на інші комп'ютери. Іноді будують мережі з виділеним (головним) комп'ютером, який називають сервером. Як і в глобальних мережах, слово «сервер» позначає комп'ютер, що надає певні послуги користувачам мережі та це більш потужна машина, ніж робочі станції, з великим жорстким диском, додатковими зовнішніми пристроями. Всі робочі станції з’єднані з головною машиною, зазвичай використовується топологія зірка, тому обмін інформацією відбувається між сервером і кожної робочої станцією. Мережі даного типу є простими в проектуванні, дешевими, забезпечують максимальну швидкість обміну файлами і абсолютну безпеку інформації. Проте локальні мережі характеризуються високими вартостями підключення віддалених елементів мережі. Локальна мережа має ту чи іншу структуру об’єднання комп’ютерів в залежності від призначення і технічних рішень. Бувають ситуації, коли топологія не має регулярної структури. Але взагалі виділяють три базових топології проектування мереж [4]. При кільцевій топології мережі кожна робоча станція з’єднана лініями зв’язку тільки з двома іншими: від одного він тільки отримує інформацію, а іншому тільки передає (рисунок 1.2). На кожній лінії зв’язку, як і у випадку зірки, працює тільки один передавач і один приймач. Чітко виділеного центру в даному випадку немає, всі комп'ютери можуть бути однаковими. Підключення нових абонентів вимагає обов’язкової зупинки роботи всієї мережі на час підключення та кільцева топологія зазвичай є найстійкішою до перевантажень.  Рисунок 1.2 – Топологія кільце Але так до мінусів можна віднести те, що сигнал в кільці проходить через всі комп'ютери мережі, тому вихід з ладу хоча б одного з них або обрив та коротке замикання в будь-якому з кабелів порушує роботу всієї мережі в цілому. Дана топологія вразлива до пошкоджень кабелю, тому в цій топології зазвичай передбачають прокладку двох паралельних ліній зв'язку, що передають інформацію в протилежних напрямках.  Рисунок 1.3 – Топологія шина Другою базовою топологією є шина (рисунок 1.3). Дана топологія відноситься до найбільш простих, бо у ній використовується один кабель, іменований магістраллю або сегментом, уздовж якого підключені всі мережеві елементи. Комп’ютери адресують дані конкретного комп’ютера, передаючи їх по кабелю у вигляді електричних сигналів всім комп'ютерам мережі, проте інформацію приймає тільки той, адреса якого збігається з адресою одержувача, зашифрованого в параметрах сигналу. Так як дані в мережу передаються лише одним комп’ютером, тоді її продуктивність залежить від кількості комп'ютерів, підключених до шини. Однак вивести пряму залежність між пропускною спроможністю мережі і кількістю комп'ютерів в ній не можна, бо на швидкодію мережі впливає множина факторів, у тому числі: характеристики апаратного забезпечення комп'ютерів в мережі; частота, з якою комп'ютери передають дані; тип мережевого кабелю; відстань між комп'ютерами в мережі. Щоб запобігти відображення електричних сигналів, на кожному кінці кабелю встановлюють термінатори, які поглинають ці сигнали. Можлива також ситуація, коли на одному або декількох кінцях кабелю відсутні термінатори, що призводить до відбиття електричних сигналів в кабелі і припинення функціонування мережі. Зірка – це топологія локальної мережі, де кожна робоча станція приєднана до центрального пристрою (рисунок 1.4). Центральний пристрій управляє рухом пакетів в мережі, бо кожен комп'ютер через мережеву карту підключається до комутатора окремим кабелем. Топологія зірка на сьогоднішній день має ряд переваг: вихід з ладу однієї робочої станції або пошкодження її кабелю не відображається на роботі всієї мережі в цілому; відмінна масштабованість: для підключення нової робочої станції необхідно прокласти від комутатора окремий кабель; висока продуктивність; простота настройки і адміністрування. 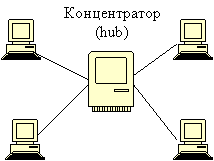 Рисунок 1.4 – Топологія зірка Однак вихід з ладу центрального комутатора обернеться непрацездатністю всієї мережі та число робочих станцій обмежене кількістю портів в центральному комутаторі. Також при виборі топології необхідно враховувати, що топологія зірка передбачає додаткові витрати на пристрій, до якого будуть підключені всі комп'ютери мережі (комутатор) та певну кількість кабелю, необхідну для підключення всіх елементів мережі. При виборі топології для побудови комп’ютерної мережі можна використовувати одну з перерахованих топологій. Вибір топології залежить від кількості елементів мережі, їх взаємного розташування та інших умов. Можна використовувати як одну, так і декілька топологій у комплексі для проектування мережі. Наприклад, поєднання топологій шини і зірка має деревоподібна топологія. Топологія дерево являє собою особливий тип структури, в якій елементи розташовані як гілки дерева та між будь-якими двома пов’язаними вузлами може бути тільки одне з’єднання. Деревоподібна топологія – це структура, в якій кожен рівень пов'язаний з наступним рівнем, і знаходиться він, як правило, вище поточного [5]. Таким чином, в ній можуть об’єднуватися кілька зіркоподібних структур, що дозволяє користувачам з’єднаються з великою кількістю серверів (рисунок 1.5). Така ієрархічна структура вважається найкращим варіантом для підключення великих мереж. Основні переваги деревоподібної топології: простота додавання нових вузлів, необхідно підключити комутатор; дозволяє користувачам легко управляти великою мережею; проста у масштабуванні, тому що кінцеві вузли можуть концентрувати в собі кілька підключень від нових вузлів; легко ідентифікувати конкретну систему, а також підключитися до більшої мережі; дозволяє користувачам підключатися до кількох серверів. Це фактично робить її простою у розширенні і здатною одночасно вмістити множину комп'ютерів. 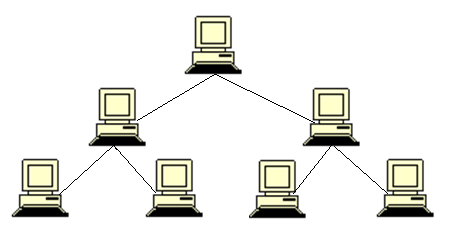 Рисунок 1.5 – Деревоподібна топологія Велика мережа з деревоподібною топологією має на увазі велику кількість підключень, структура підключення в реальному житті може бути досить заплутаною та потребуватиме постійного моніторингу та обслуговування також для підключення всіх елементів буде необхідна велика кількість довгих кабелів, а це досить затратно. Та якщо магістраль мережі виходить з ладу, то її окремі частини не зможуть взаємодіяти один з одним. Можна зробити висновок, що описана топологія є оптимальною для використання при проектуванні та структурно-топологічної оптимізації комп’ютерних мереж роботизованих систем. Зазвичай проектування структури комп’ютерної мережі необхідно починати із з’ясування всіх функціональних завдань мережевих елементів та з вибору необхідних для цього елементів: топології мережі, протоколів та середовища передачі даних. Після етапу проектування виконується монтаж мережевих елементів зв’язку та необхідного обладнання. У разі додаткового використання бездротових мереж, заснованих на технології Wi-Fi, виконується налаштування Wi-Fi мережі. Найчастіше для забезпечення інформаційного обміну підприємства в цілому використовують кабельні системи як необхідний технічний фундамент для побудови інформаційних і автоматизованих систем. Для підключення до сегмента мережі нестаціонарних роботизованих елементів, або коли неможливо створити дротову інфраструктуру, включають бездротові сегменти. Найчастіше використовують як передавальне середовище неекрановану або екрановану виту пару категорії 5E, 6 та 6A, а також одномодовий і багатомодовий волоконно-оптичний кабель. Виділяють такі стандарти, які на сьогодні надають найбільш повну інформацію про те, як правильно виконати монтаж комп’ютерної мережі: міжнародний ISO/IEC 11801:2002 Information Technology. Generic; Cabling for Customer Premises; європейський CENELEC ЕN 50173-3:2008 Information Technology; Generic Cabling Systems; ANSI/ЕІА/TIA-568-С Commercial Building Telecommunications Wiring Standard (February 2009). 1.3 Аналіз методів оптимізації мереж роботизованих систем З огляду на те, що автоматизація підприємств є необхідною мірою для збереження конкурентоспроможності, проблема структурно-топологічної оптимізації комп’ютерних мереж роботизованих частин підприємства є актуальною. У роботах Майкла Хаммера і Джеймса Чампі [6] дуже просто розповіли про складні процеси неминучих змін та саме вони вперше ввели поняття реінжинірингу в бізнес-лексикон на початку 90-х. У роботі добре описані принципи структурно-топологічної оптимізації бізнес-процесів компаній, але не представлені формальні моделі та методи для його проведення. Досліджуються існуючі підходи, методи і технології реінжинірингу інформаційних систем [7], де на підставі результатів досліджень і сформованої класифікації дається оцінка поточного стану в певній області. Була виділена модель «підкови» для вирішення завдання реінжинірингу комп’ютерних мереж.  Рисунок 1.6 – Модель «підкови» [7] Дана модель описується трьома основними процесами (рисунок 1.6). Перший процес передбачає відновлення архітектури існуючої системи за допомогою вилучення артефактів, які її характеризують. Отримана архітектура аналізується за вимогами до надійності, захищеності тощо. Другий процес полягає в трансформації архітектури до бажаної. Отримана в результаті трансформації нова архітектура оцінюється з урахуванням накладених на неї обмежень. Третій процес включає розробку системи, що відповідає новій архітектурі. Тут вирішуються питання декомпозиції елементів системи по пакетам, здійснюється вибір стратегій взаємодії елементів системи. З моделлю «підкова» співвідноситься три рівня, на кожному з яких може здійснюватися трансформація існуючої системи: подання на рівні структури коду, подання на рівні функціональності системи та подання на архітектурному рівні. Згідно з моделлю «підкова» трансформація системи може здійснюватися на кожному з рівнів, при цьому більш низький рівень підтримує трансформацію на більш високому рівні. Слід визнати, що модель «підкова» знаходить широке застосування в рамках діяльності, пов'язаної з структурно-топологічної оптимізації комп’ютерних мереж. У роботі [8] розглянуте формальне подання понять «система», «територіально розподілена система» та розроблена композиційна модель динамічної розподіленої задачі структурного синтезу територіально розосереджених систем, до числа яких відносяться і комп’ютерні мережі роботизованих систем. На основі аналізу взаємозв’язку завдань по вхідних і вихідних даних створена композиційна схема, подана у вигляді цільової діаграми. Удосконалено технологію розв'язання задач структурного синтезу об'єктів з використанням процедур моделювання системної динаміки. Композиційна схема дозволила більш наочно подати взаємозв’язок завдань єдиної проблеми структурного синтезу територіально розосереджених систем (рисунок 1.7). Розподілена динамічна задача структурного синтезу є багатовимірною, а процес її рішення – мультиітераційним. |