БПЛА. Программа для определения помеховой обстановки. 24 Написано на С. Приложение Программа для построения траектории полета бпла в 25 условиях различных навигационных помех разного вида. Написано на С
 Скачать 0.63 Mb. Скачать 0.63 Mb.
|

|
Федеральное государственное бюджетное образовательное учреждение высшего образования «Московский государственный технический университет гражданской авиации» Факультет прикладной математики и вычислительной техники Кафедра вычислительных машин, комплексов, систем и сетей Построение наилучшей траектории полёта беспилотного летательного аппарата с учётом помех различного происхождения Направление «Обеспечение безопасности при осуществлении полётов воздушных судов» Ребров Егор Денисович, студент 3 курса 1 группы направления подготовки 09.03.01 очной формы обучения Гилко Виктор Сергеевич, студент 3 курса 1 группы направления подготовки 09.03.01 очной формы обучения Научный руководитель: Затучный Д.А., доктор технических наук, доцент Москва, 2021 Содержание 1.Введение 3 Основная часть 3 2.1. Анализ литературы и документов по теме исследования 3 2.2. Построение алгоритмов классификации беспилотных летательных 7 аппаратов Классификация помех навигационным системам беспилотных 13 летательных аппаратов Построение траектории полёта беспилотного летательного аппарата 15 с учётом помеховой обстановки Построение траектории БПЛА при посадке на движущийся объект 16 2.6. Методы борьбы с навигационными помехами, вызванными 17 воздействиями различного характера на БПЛА 2.7. Метод построения траектории БПЛА с учётом всех имеющихся 20 факторов Заключение 22 Список использованных источников 23 Приложение 1. Программа для определения помеховой обстановки. 24 Написано на С++. Приложение 2. Программа для построения траектории полета БПЛА в 25 условиях различных навигационных помех разного вида. Написано на С++ Приложение 3. Алгоритм построения посадки БПЛА на движущийся 26 объект. Написано на С++ Приложение 4. Программа выбора наилучшей траектории полёта 28 беспилотного летательного аппарата. Написано на C++ Введение (Автор – Гилко В.С.) Одним из следствий роста технического прогресса является усложнение необходимых для решения задач, в том числе и в гражданской авиации (ГА). При этом резко увеличивается физическая и психоэмоциональная нагрузка на конкретного человека (пилота воздушного судна или диспетчера), на которого в настоящее время возложена ответственность за принятие решения, от которого зависит безопасность перевозимых людей и ценных грузов. Одним из направлений решения этой проблемы должен стать переход к автоматизации (хотя бы частичной) процесса обеспечения полёта воздушного судна (ВС). Использование беспилотных летательных аппаратов (БПЛА) призвано помочь в решении некоторых задач по обеспечению рационального использования воздушного пространства (ВП), а также проведения соответствующего наблюдения для обеспечения экипажа ВС и наземных служб управления воздушным движением (УВД) достоверной информацией. Тем не менее, массовое использование БПЛА приводит к необходимости решения задач, связанных с их классификацией для последующей сертификации и чёткого разграничения областей и регионов применения различных БПЛА. В противном случае, могут возникнуть ситуации, когда использование этих летательных аппаратов (ЛА) уже будет приносить не пользу, а вред или вообще приводить к опасным авиационным происшествиям или даже авиакатастрофам. В этой работе была решена задача построения алгоритмов выбора траектории полёта БПЛА с учётом интенсивности помех в воздушном пространстве (ВП). При этом следовало рассматривать как автономный полёт БПЛА, так и частную задачу его посадки на движущийся объект, которая, тем не менее, является достаточно актуальной в настоящее время. Вопросы экономии времени и эффективности использования имеющегося ресурса имеют большое значение для транспортной отрасли. Также были разработаны методы борьбы с навигационными помехами, вызванными воздействиями различного характера на БПЛА и метод построения наилучшей траектории БПЛА с учётом всех имеющихся факторов. Основная часть 2.1. Анализ литературы и документов по теме исследования (Автор– Гилко В.С.) Согласно Правилам использования воздушного пространства Российской федерации [1], БПЛА определяется как «летательный аппарат, выполняющий полёт без пилота (экипажа) на борту и управляемый в полёте автоматически, оператором с пункта управления или сочетанием указанных способов». Похожее определение существует и в США, где любой ЛА или ВС, не имеющие пилота в виде человека, автоматически считаются БПЛА. При этом имеется некая особенность в понимании, что такое есть БПЛА с точки зрения Международной организации гражданской авиации (ИКАО). В данной ситуации в основу определения БПЛА ставится то обстоятельство, какими правилами использования воздушного пространства регулируется полёт летательного аппарата, а также, какой является цель их использования. Радиоуправляемые модели в отличие от БПЛА предназначены в первую очередь для различных развлекающих программ и должны регулироваться местными правилами использования воздушного пространства. В п. 49 [1] чётко оговариваются правила полётов БПЛА в Российской Федерации (РФ). При этом можно обойтись без разрешения на полёты аппаратов с максимальной взлётной массой менее 0,25 кг. Для полётов остальных ЛА, отнесённых к классу БПЛА, в обязательном порядке требуется разрешение местных органов самоуправления. В п. 52 [1] сформулировано, что полёт БПЛА должен происходить по имеющемуся плану его полёта, который должен составляться с учётом временного и местного режимов, а также кратковременных ограничений в интересах пользователей воздушного пространства, организующих полеты беспилотных воздушных судов. При этом делается исключение для полётов БПЛА с максимальной взлетной массой до 30 кг. Кроме того, эти полёты должны происходить при определённых условиях: днём или в светлое время суток; на сверхмалых высотах (менее 150 м от земной или водной поверхности); в пределах прямой видимости; вне диспетчерских зон аэродромов гражданской авиации. Анализ этих пунктов Положения [1] даёт возможность сделать вывод, что показателями для классификации БПЛА являются: максимальная взлётная масса; высота полёта; цель использования аппарата. Следует заметить, что для надёжного и длительного функционирования БПЛА необходимо наличие следующих объектов [2]: пункта управления его полётом, осуществляющего передачу радиокоманд аппарату, приём и анализ информации, поступающей от него; независимые точные системы наблюдения за полётом БПЛА. В настоящее время рекомендуется использовать для этой цели спутниковые радионавигационные системы (СРНС) ГЛОНАСС отечественного производства или GPS производства США; некоторое дополнительное оборудование, которое может потребоваться для обслуживания БПЛА. Необходимо отметить и некоторые характеристики БПЛА, которые можно использовать для классификации их по типу управления: 1) автоматический способ управления по заданной заранее программе; 2) управление радиокомандами с пункта управления; 3) гибридная схема управления. Ниже в таблице 1 приведены некоторые виды классификации БПЛА по лётным характеристикам [3]. Таблица 1 Классификация БПЛА по лётным характеристикам
В ГА беспилотные летательные аппараты используются в основном в следующих направлениях: как дополнительный источник навигационной, геодезической, метеорологической или любой иной необходимой информации (например, поиск потерпевшего аварию ВС); как перевозчик небольших и необходимых грузов, таких как почта, продовольствие и т.д. в труднодоступных и отдаленных районах; 3) как транспортное средство, например, в виде воздушного такси; 4) в качестве составной части сельскохозяйственной авиации. Первые проекты внедрения воздушного беспилотного такси возникли в Саудовской Аравии. Во время проведения международного саммита в Дубаи присутствующие имели возможность видеть первую модель такого транспортного средства. Внутри кабины такси из элементов управления присутствует только сенсорный экран. Для совершения поездки пассажиру требуется лишь задать пункт прибытия. Тем не менее, несмотря на все преимущества использования БПЛА, их каналы связи достаточно уязвимы для внешнего вмешательства. Cигналы СРНС достаточно легко глушить или имитировать с целью создания ложного сообщения. В [4] отмечено, что для выполнения задач наблюдения или поиска и определения координат исследуемых объектов БПЛА должен иметь следующие составляющие: устройства, способные собирать, обрабатывать и ретранслировать требуемую информацию; навигационную аппаратуру потребителей, способную принимать сигналы от СРНС; устройства радиосвязи, дающие возможность осуществлять надёжную передачу и приём достоверной информации, а также получение команд из службы управления воздушным движением; 4) бортовую вычислительную систему; 5) устройства хранения информации. В [5] подробно описано использование БПЛА в космических целях, в сельском хозяйстве, а также экспериментальные БПЛА. Управление «роем» БПЛА имеет большое значение для обеспечения безопасности полётов. В практике применения информационных систем с использованием БПЛА возникает ряд задач, при которых необходимо координированное управление несколькими одновременно действующими летательными аппаратами. Примером таких применений являются [5]: операции по картографированию местности с малых высот полета, например, при низкой облачности; поисковые операции, проводимые на больших пространствах (на море, в тайге, степях и пустынях) и в условиях жесткого ограничения во времени проведения операций; операции в сельскохозяйственном производстве по борьбе с вредителями (саранчой, грызунами и т.д.) на больших территориях; Система для управления роем БПЛА должна обеспечить решение следующих функциональных задач [5]: контроль положения каждого БПЛА роя и передачу этих данных в центр управления в реальном масштабе времени; передачу команд из центра управления на все БПЛА роя; система должна обеспечить управление роем БПЛА в зоне размером 50х50 км; число управляемых аппаратов до 10-15. Кроме того, для управления роем БПЛА к системе могут предъявляться дополнительные требования, такие как обеспечение помехозащищенной навигации аппаратов и взаимодействие с центром управления по защищенным каналам связи. Структурная схема системы управления роем БПЛА приведена на рис.1.  Рис. 1. Структурная схема управления группировкой БПЛА 2.2. Построение алгоритмов классификации беспилотных летательных аппаратов (Автор – Гилко В.С.) Для построения алгоритма классификации беспилотного летательного аппарата используются показатели, приведённые в предыдущем разделе: Высота полёта БПЛА; Продолжительность полёта БПЛА; Максимальная взлётная масса БПЛА; 4) Способ управления БПЛА; 5) Цель использования БПЛА. Представляется естественным поставить максимальную взлётную массу БПЛА на первое место, так как согласно [1] – это главный показатель для получения разрешения на полёты. Цель использования БПЛА можно считать наименее значимым показателем, так как один и тот же летательный аппарат иногда можно использовать для различных целей. В некоторых случаях при классификации БПЛА вместо цели использования может быть указана рекомендация для использования. Блок-схема классификации БПЛА с точки зрения цели использования приведена на рис. 2. К приведённой на рис. 2 схеме необходимо сделать следующие дополнения: Продолжительность полёта может учитываться в зависимости от ситуации не в километрах, а в часах автономного полёта. В частности, это имеет значение при использовании метеорологических радиозондов. При использовании БПЛА в конкретной области авиации следует учитывать следующие показатели: a) для сельскохозяйственной авиации лучше использовать маловысотные аппараты с небольшой продолжительностью полёта. Максимальная взлётная масса, в этом случае, может изменяться в зависимости от ситуации. При этом вполне достаточно системы управления по заданной заранее программе. б) для беспилотного аппарата, который может использоваться как ретранслятор сигнала (в том числе и спутникового), высота и продолжительность полёта не имеют принципиального значения, за исключением использования в условиях горной местности или наличия высотных зданий. Тем не менее, в данном случае имеет значение максимальная взлётная масса БПЛА. Чем мощнее передатчик сигнала, тем больше его масса. Для того, чтобы передать сообщение на расстоянии 100 м достаточно будет передатчика массой 3-5 кг, на расстоянии несколько км его вес уже должен составлять 6-8 кг. При этом лучше использовать систему управления на основе команд с наземного пункта или с гибридной системой управления, так как при выполнении этой задачи возможны нештатные ситуации. в) в случае использования БПЛА в качестве метеорологического радиозонда следует использовать средневысотные или высотные аппараты с большой продолжительностью полёта. г) в целях наблюдения за земной поверхностью, а также поиска потерпевших аварию ВС или других объектов следует использовать маловысотные БПЛА с средней продолжительностью полёта, если место аварии приблизительно известно. Управление таким БПЛА должно осуществляться командами с земли, а максимальная взлётная масса зависит от типа специальной аппаратуры, находящейся у него на борту.  Рис. 2. Блок-схема классификации БПЛА Рассмотрим примеры классификации некоторых БПЛА по предложенному алгоритму. 1) Skaylark II («Жаворонок – II»): его максимальная взлётная масса составляет 65 кг, из них 9 кг – полезная нагрузка; максимальная высота полёта составляет 5000 м; продолжительность полёта составляет по дальности 60 км, а по времени непрерывного полёта 240 мин. гибридная система управления. Используя предложенный алгоритм, можно сделать вывод, что этот БПЛА является средневысотным летательным аппаратом с малой продолжительностью полёта. Таким образом, он может использоваться как ретранслятор спутникового сигнала на расстоянии в несколько километров. 2) БПЛА «Орлан». Этот БПЛА имеет следующие характеристики: его максимальная взлётная масса составляет 14 кг, из них 5 кг – полезная нагрузка; продолжительность полёта в автономном режиме до 600 км и до 16 часов; максимальная высота полёта составляет 5000 м; - гибридная система управления. Этот БПЛА относится к средневысотным с большой продолжительностью полёта и может использоваться для получения метеорологической информации. Если при классификации БПЛА для ГА не учитывать цель (область) использования, а рассматривать только технические характеристики, то алгоритм классификации может стать более простым. Его блок-схема приведена на рис. 3. Исходя из приведённого алгоритма можно провести классификацию и остальных типов БПЛА: автономные средневысотные с малой продолжительностью полёта; автономные маловысотные со средней продолжительностью полёта; автономные маловысотные с большой продолжительностью полёта; автономные средневысотные с cредней продолжительностью полёта; автономные средневысотные с большой продолжительностью полёта; автономные высотные с малой продолжительностью полёта; автономные высотные с cредней продолжительностью полёта; автономные высотные с большой продолжительностью полёта; радиокомандные маловысотные с малой продолжительностью полёта; радиокомандные маловысотные со средней продолжительностью полёта; радиокомандные маловысотные с большой продолжительностью полёта; радиокомандные средневысотные с малой продолжительностью полёта; радиокомандные средневысотные с cредней продолжительностью полёта; радиокомандные средневысотные с большой продолжительностью полёта; радиокомандные высотные с малой продолжительностью полёта; радиокомандные высотные с cредней продолжительностью полёта; радиокомандные высотные с большой продолжительностью полёта; гибридные маловысотные с малой продолжительностью полёта; гибридные маловысотные со средней продолжительностью полёта; гибридные маловысотные с большой продолжительностью полёта; гибридные средневысотные с малой продолжительностью полёта; гибридные средневысотные с cредней продолжительностью полёта; гибридные средневысотные с большой продолжительностью полёта; гибридные высотные с малой продолжительностью полёта; гибридные высотные с cредней продолжительностью полёта.  Рис. 3. Классификация БПЛА по техническим характеристикам По максимальной взлётной массе можно провести естественную классификацию БПЛА как больших, средних и малых. Уже на этапе проектирования БПЛА необходимо ответить на вопрос, насколько стоимость, затраченная на его проектирование и создание, будет соответствовать выгоде от его эксплуатации. Введём обозначения: сi - средняя cтоимость изготовления БПЛА в зависимости от его высоты полёта, i=1,…,3; сj - средняя cтоимость изготовления БПЛА в зависимости от его продолжительности полёта, i=1,…,3; сl - средняя cтоимость изготовления БПЛА в зависимости от его взлётной массы, i=1,…,3; сk - средняя cтоимость изготовления БПЛА в зависимости от схемы управления им, i=1,…,3. Можно сделать предположение, что общая стоимость БПЛА можно, в зависимости от типа его классификации, найти по следующей формуле: С=сi +cj +cl +ck . (1) Представляется естественным сравнить этот показатель с неким интегрированным значением, которое обозначим . Это значение может изменяться в зависимости от региона использования БПЛА и условий его эксплуатации, а также от круга решаемых БПЛА задач. Оно может включать средний ресурс использования данного типа БПЛА в конкретных условиях и любые другие факторы как глобального, так и локального характера, влияющие на выгоду от использования БПЛА. Предложим следующее правило: Если С , то данный тип БПЛА рекомендуется к использованию в данном регионе для решения заявленных задач. Если С , то данный тип БПЛА не рекомендуется использовать в данном регионе для решения заявленных задач. 2.3. Классификация помех навигационным системам беспилотных летательных аппаратов (Автор – Ребров Е.Д.) Все помехи, воздействующие на навигационные системы БПЛА и могущие привести к погрешностям и даже к серьёзным ошибкам при моделировании его траектории, стоит разделить на два основных вида: естественные (не зависящие от деятельности человека) и искусственные (зависящие от деятельности человека) [6]. К естественным помехам следует отнести следующие: Ионосферные помехи. Их причиной является прохождение волн короткого диапазона через ионосферу. Влияние этих помех наиболее проявляется в зоне Крайнего Севера. Тропосферные помехи. Эти помехи являются следствием прохождения волн через тропосферу. Помехи, связанные с многократным отражением волны, несущей навигационную информацию, от высотных зданий и горных образований. Влияние этих помех наиболее сказывается в районах, где находятся большие населённые пункты или со сложным рельефом. Например, в районе Кавказских гор. Искусственные помехи работе навигационных систем БПЛА, в свою очередь, можно разделить на два вида [7]: Являющиеся следствием деятельности человека, но не имеющие предумышленного характера; Несанкционированные помехи. Их причиной является умышленное воздействие некоторого лица или группы лиц на навигационные системы БПЛА. Помехи первого типа имеют радиоэлектронный характер. Их причиной является деятельность различных предприятий. Как следствие, их проявление в меньшей степени возможно в сельской местности, но достаточно вероятно в промышленных регионах. Сегодняшняя инженерная и элементная база даёт возможность ставить несанкционированные помехи навигационным системам БПЛА. При этом постановка этих помех уже не является дорогим или трудоёмким делом. Для выполнения этой задачи иногда бывает достаточно использование недорогой и простой аппаратуры. Помехи такого рода могут быть поставлены в любом месте, но можно заметить, что зоны, имеющие большие города и местность со сложным рельефом, наиболее вероятны с точки зрения проведения подобных атак. Это объясняется тем, что городские районы и горы являются наилучшим убежищем для преступных группировок и возможности осуществлять подобные воздействия [8]. Далее в таблице 2 приведена классификация помех на навигационные системы БПЛА. Таблица 2 Классификация помех на навигационные системы БПЛА
Следует учитывать, что при анализе помеховой обстановки в районе, где проходит полёт БПЛА, необходимо учитывать не только вероятность возникновения той или иной помехи, но и возможные потери от её возникновения [6, 8]. При этом, если ионосферные и тропосферные погрешности ещё можно прогнозировать, то предвидеть несанкционированные воздействия на навигационные системы БПЛА крайне сложно. На рисунке 4 приведен алгоритм определения помеховой обстановки, программная реализация этого алгоритма предложена в Приложении 1. Введем обозначения: N – число различных помех. Наличие помех: 1, 2, 3, …, N. Вероятность возникновения помехи: 𝛼1, … , 𝛼𝑁. Вес помехи или степень ее угрозы: 𝑚1, … , 𝑚𝑁. Показатель приоритетности i-й помехи: 𝑝𝑖 = 𝛼𝑖𝑚𝑖 Показатель помеховой обстановки в данной точке БПЛА: 𝑃 Предложим некоторый ограничитель для помех β  Рис. 4. Алгоритм определения помеховой обстановки 2.4. Построение траектории полёта беспилотного летательного аппарата с учётом помеховой обстановки (Автор- Ребров Е.Д.) В предыдущем разделе был введён показатель, характеризующий помеховую обстановку в конкретном регионе. При построении траектории полёта БПЛА необходимо учесть следующее: Для БПЛА главное – это выполнить свою задачу за минимальное время; Так как наличие помех – это один из основных факторов, влияющих на точность и надёжность выполнения задачи, то при построении (или корректировке) траектории БПЛА необходимо учитывать и показатели оценки помеховой обстановки, предложенные в предыдущем разделе. На рисунке 5 приведен алгоритм построения траектории полета БПЛА в условиях различных навигационных помех разного вида, программная реализация этого алгоритма предложена в Приложении 2. Введем новые обозначение, которые не использовались в первом алгоритме (рис. 4): Минимальное время выполнения задания 𝑡 Предложим критерии выбора траектории: 𝑡 → 𝑚𝑖𝑛 при следующих ограничениях: 𝑃 ≤ 𝛾 и max 𝑝𝑖 ≤ 𝜆 В некоторых случаях 𝛾 может превышать β. 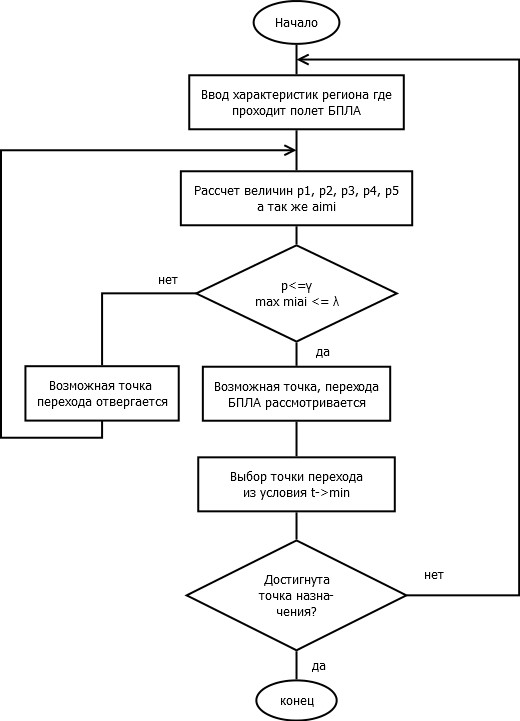 Рис. 5. Алгоритм построения траектории полета БПЛА в условиях различных навигационных помех разного вида. 2.5. Построение траектории БПЛА при посадке на движущийся объект (Автор – Гилко В.С.) Задача точной и надёжной посадки БПЛА на движущийся объект (железнодорожную платформу, палубу морского судна и т.д.) имеет большое значение, в том числе и в гражданской отрасли. Это связано в первую очередь с постоянно усложняющимися логистическими требования в транспортной отрасли. Использование передовых технологий, в частности БПЛА, поэтому крайне важно [9]. Задача построения траектории БПЛА при использовании его для посадки на движущийся объект усложняется за счёт того, что в этом случае, помимо характеристик самого летательного аппарата и помеховой обстановки в регионе, где происходит полёт, необходимо знать и характеристики объекта, на который осуществляется посадка (скорость и направление движения, размер, масса, прочность материала, из которого он изготовлен, и т.д.). При разработке алгоритма выбора траектории БПЛА для такой посадки на первый план выходит вопрос максимальной точности выполнения такого манёвра, но не стоит забывать и о том, что имеющейся временной ресурс не должен быть превышен. На рисунке 6 приведен алгоритм построения посадки БПЛА на движущийся объект, программная реализация этого алгоритма предложена в Приложении 3. Введем новые обозначения, в данном алгоритме используется критерий ограничивающий по времени выполнения задачи и точности посадки СКО. Требуемая точность должна стремиться к минимуму 𝛿 → 𝑚𝑖𝑛. Время выполнения же должно быть меньше некоторого ограничителя 𝑡 ≤ 𝑇.  Рис. 6. Алгоритм построения посадки БПЛА на движущийся объект 2.6. Методы борьбы с навигационными помехами, вызванными воздействиями различного характера на БПЛА (Автор – Ребров Е.Д.) На рис. 7 приведён общий вид управления полётом нескольких БПЛА.  Рис. 7. Общий вид управления полётом нескольких БПЛА Анализируя схему, можно прийти к следующему заключению: Полёт БПЛА осуществляется при использовании трёх составляющих: орбитальная группировка космических аппаратов (КА GNSS), навигационные системы БПЛА, наземные системы управления полётом «роя» БПЛА (КП-управления). Спутниковые навигационные системы отвечают за предоставление точной навигационной информации, но при этом являются достаточно чувствительными к различным помехам, в силу малой длины волны сигнала, а также его малой мощности. При этом на качество навигационной информации, полученной с навигационного космического аппарата (НКА), влияет и то обстоятельство, что в этом случае навигационный сигнал проходит через ионосферу и тропосферу, т.е. подвержен влиянию ионосферных и тропосферных погрешностей. Наземный пункт управления выполняет функции контроля за полётом БПЛА и достоверности навигационной информации. Можно предложить два метода борьбы с навигационными помехами, воздействующими на БПЛА: Резервирование и модернизация навигационного оборудования, находящегося на борту БПЛА и в наземном контрольном пункте управления с точки зрения повышения его помехоустойчивости; Сличение навигационной информации, полученной в БПЛА и в наземном пункте управления при пролёте БПЛА различных контрольных точек на маршруте [10]. К основным недостаткам первого метода необходимо отнести следующее: Необходимость усовершенствования и резервирования всего оборудования на борту всех БПЛА и в наземном комплексе управления является достаточно дорогостоящей процедурой; В некоторых случаях эта процедура не совсем легко осуществима, так как довольно часто БПЛА представляет собой небольшой по размеру объект. Суть предложенного метода борьбы с навигационными помехами, воздействующими на БПЛА, заключается в следующем: По информации от спутниковых радионавигационных систем (СРНС) на борту БПЛА и в наземном комплексе управления формируются два вектора навигационных параметров X и Y. Введём их обозначения: X = (x1,x2,...,xn); = (y1,y2,...,yn), где n – количество навигационных параметров. Для каждого навигационного параметра вводится вектор предельных значений (допусков). Обозначим его следующим образом: = (z1,z2,...,zn). Если для любого i: 1in xi −yi zi , то принимается решение о возможности использовать эту навигационную информацию. Если хотя бы для одного номера i: 1in xi −yi zi , то принимается решение о немедленной коррекции данных этого БПЛА или прекращение выполнения его задачи. Следует отметить, что в случае БПЛА невозможно полагаться на выучку и интуицию пилота, как в случае с обычным воздушным судном (ВС). Поэтому решение о наличии внешних воздействий на его навигационные системы должно быть принято с высокой степенью достоверности. В противном случае, при наличии ошибки 1 рода, т.е. «БПЛА признан подвергшимся внешним воздействиям, хотя это не соответствует действительности», можно подвергнуть риску выполнение важной поставленной задачи по доставке груза в труднодоступный регион. При наличии ошибки 2 рода, т.е. «БПЛА признан исправным, хотя его навигационное обеспечение не удовлетворяет имеющимся требованиям» есть риск создания опасного инцидента или даже авиакатастрофы с участием БПЛА. На рис. 8 показано наглядное представление предложенного метода. 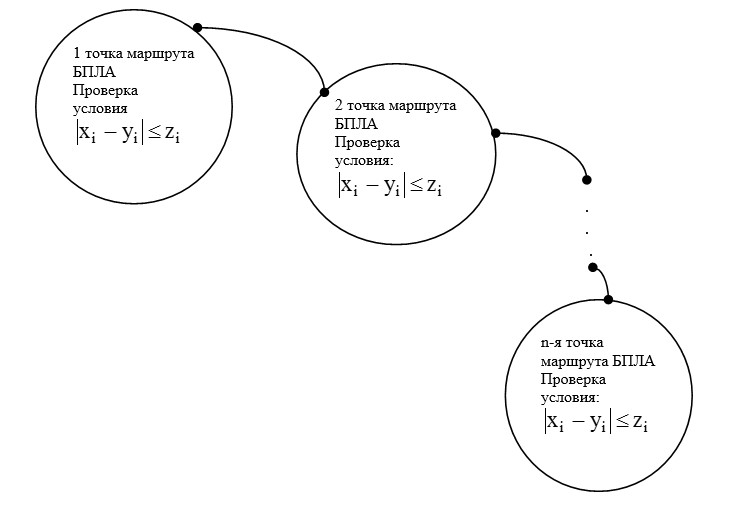 Рис. 8. Выявление внешних воздействий на навигационные системы БПЛА методом сличения навигационной информации Как видно из рисунка, сличение навигационной информации должно происходить в разных точках маршрута (траектории) БПЛА. Это могут быть или реперные точки на маршруте или отсечки через определённые промежутки времени. Количество этих точек на траектории полёта определяется требованиями по обеспечению безопасности полётов [11]. 2.7. Метод построения траектории БПЛА с учётом всех имеющихся факторов (Автор – Ребров Е.Д.) В предыдущих разделах работы были предложены алгоритмы построения траектории БПЛА, в том числе и на движущийся объект, например, железнодорожную платформу или морское судно. При этом факторы, связанные с внешними воздействиями, учитывались только в ограничительном виде, т.е. как некие предельные значения, при достижении которых БПЛА обязательно должен менять свою траекторию [12, 13]. В этом разделе будет предложен метод выбора траектории БПЛА, основанный на учёте численных характеристик различных факторов. Предположим, что имеется k факторов, которые в той или иной мере влияют на потери от совершения ошибки при изменении или не изменении траектории БПЛА в j-ю точку. Тогда показатель ошибки будет определяться следующим образом: Lj =max{L1 ,…,Lk}, где Lz – показатель потерь отноcительно z-го фактора (z=1,…,k), определяемого следующим образом: Lz =1, если z >Z Lz= z , если z Z Z Z – это максимально допустимое значение для БПЛА относительно zго фактора, а z – потери относительно z-го фактора . Представляется возможным сформулировать следующий критерий выбора маршрута БПЛА: min{Lj}, t T , где T – ограничение по времени. Для каждой точки маршрута это значение может меняться. Если этим условиям удовлетворяет переход в k-ю точку, то наилучшим манёвром является переход БПЛА в k-ю точку. Этот метод основан на методе динамического программирования [14]. Показатели помеховой обстановки могут быть известны заранее, учитывая специфику региона (тропосферные и ионосферные помехи, рельеф местности, интенсивность застройки) или при получении метеорологической информации. Тем не менее, могут возникнуть и непредсказуемые помехи, например, в случае несанкционированных воздействий. В этом случае может быть сделана рекомендация изменить значение T. Исходными данными должны являться координаты БПЛА и места его посадки, его скорость, данные по помеховой обстановке и метеорологическая информация. В случае посадки БПЛА на движущийся объект также необходимо задать его скорость и направление движения. Блок-схема алгоритма приведена на рис. 8.  Рис.8. Блок-схема алгоритма выбора траектории БПЛА Программная реализация этого алгоритма приведена в Приложении 4. 3. Заключение (Автор – Гилко В.С.) В ходе работы были получены следующие результаты: 1) Предложен алгоритм с созданием ПО для классификации БПЛА по техническим характеристикам; Предложен алгоритм с созданием ПО по классификации БПЛА с учётом цели его использования; Предложен алгоритм с созданием ПО по определению возможности использования конкретного типа БПЛА в определённых регионах и при определённых условиях с учётом затраченной стоимости и возможной выгоды; Проведена классификация естественных и искусственных помех навигационным системам беспилотного летательного аппарата с учётом вероятности их возможного возникновения в конкретном регионе; 5) Введён показатель, характеризующий уровень навигационных помех; Предложен критерий выбора траектории полёта беспилотного летательного аппарата с учётом возможной помеховой обстановки; Построен алгоритм c cозданием ПО по выбору траектории полёта на основе этого критерия; Предложен критерий выбора траектории полёта беспилотного летательного аппарата при посадке его на движущийся объект; Построен алгоритм с созданием ПО выбора траектории полёта на основе этого критерия; Предложен метод выявления внешних воздействий на навигационные системы БПЛА; Предложен метод и сделана его ПО по построению наилучшей траектории БПЛА с учётом всех влияющих факторов. Список использованных источников Постановление Правительства РФ от 11.03.2010 N 138 (ред. от 12.07.2016) «Об утверждении Федеральных правил использования воздушного пространства Российской Федерации». Слюсар В. Радиолинии связи с БПЛА: примеры реализации. – Электроника: наука, технология, бизнес. – 2010. - № 5. C. 56 - 60. Заблотский А., Ларинцев Р.. БПЛА: первое знакомство. – Авиация и время, 2008, №2 (98). Современные информационные технологии в задачах навигации и наведения беспилотных маневренных летательных аппаратов. Под ред.: М.Н. Красильщикова, Г.Г. Серебрякова. – М., ФИЗМАТЛИТ, 2009. Авиационно-исторический журнал. Авиация и время 2008’2. Шаваев А.В. Разработка рекомендации по совершенствованию обслуживания беспилотных авиационных систем. - В сборнике: Наука и молодёжь: проблемы, поиски, решения, Труды Всероссийской научной конференции студентов, аспирантов и молодых ученых, Сибирский государственный индустриальный университет; под общественной редакцией М.В. Темлянцева, 2019, c. 314-322. Затучный Д.А. Анализ зависимости погрешностей при навигационном обеспечении воздушного судна, связанных с отражением от земной поверхности и параметрами полёта. - Журнал “Информатизация и связь”, №2, 2017, стр. 14-17. Затучный Д.А. Анализ воздействия различных помех на навигационные системы воздушных судов гражданской авиации. - Журнал “Информатизация и связь”, №2, 2018, стр. 7-11. Затучный Д.А., Богатюк А.С., Витушкин В.В. Моделирование траектории полёта воздушного судна с учётом возможных отказов навигационного и связного оборудования. - Вестник Санкт-Петербургского государственного университета гражданской авиации, №1 (18), 2018, стр. 102-110. Кинкулькин И.Е., Cурков Д.М., Рубцов В.Д. Контроль целостности интегрированной системы СРНС – ИНС. Новости навигации, №2, 2003. 11. Приложение 10 к Конвенции о международной гражданской авиации: Авиационная электросвязь (Том 1). - Международная организация гражданской авиации, 2006. Завалишин О.И., Затучный Д.А. Методы повышения помехоустойчивости навигационных систем воздушных судов гражданской авиации. - Информационно-аналитический журнал «Радиоэлектронные технологии», №2/ 2019 (21), cтр. 70-74. Затучный Д.А. Выбор траектории полёта воздушного судна гражданской авиации в условиях интенсивных помех. - Сборник докладов XVI Всероссийской научно-технической конференции «Научные чтения по авиации, посвящённые памяти Н.Е. Жуковского», стр. 307-311. Вентцель Е.С. Элементы динамического программирования. – Москва, Наука, 1964. Приложения Приложение 1. Программа для определения помеховой обстановки. Написано на С++. #include float a[5]; float m[5]; float p; const float b = 3; int main() { cout << "Введите характеристики региона:\n"; cout << "\tВысота гор"; cin >> height; cout << "\tПогода"; cin >> weather; cout << "Введите вероятности возникновения каждой из помех:\n"; for (int i = 0; i < 5; i++) { cin >> a[i]; } cout << "Введите вес каждой помехи:\n"; for (int i = 0; i < 5; i++) { cin >> m[i]; } for (int i = 0; i < 5; i++) { p += a[i] * m[i]; } if (p < b) { cout << "Помеховая обстановка удовлетворяет условиям полета."; } else { cout << "Помеховая обстановка не удовлетворяет условиям полета."; } } Приложение 2. Программа для построения траектории полета БПЛА в условиях различных навигационных помех разного вида. Написано на С++ #include float a[5]; float m[5]; float max = 0; float p; const float y = 3; const float l = 3; float t; int main() { cout << "Введите характеристики региона:\n"; cout << "\tВысота гор"; cin >> height; cout << "\tПогода"; cin >> weather; while (true) { cout << "Введите вероятности возникновения каждой из помех:\n"; for (int i = 0; i < 5; i++) { cin >> a[i]; } cout << "Введите вес каждой помехи:\n"; for (int i = 0; i < 5; i++) { cin >> m[i]; } for (int i = 0; i < 5; i++) { p += a[i] * m[i]; if (a[i] * m[i] > max) max = a[i] * m[i]; } if (p < y && max < l) { cout << "Возможная точка перехода рассматривается"; cin >> t; bool end = false; cin >> end; if (end) { cout << "Достигнута точка назначения"; return 0; } } else { cout << "Возможная точка перехода не рассматривается"; } } } Приложение 3. Алгоритм построения посадки БПЛА на движущийся объект. Написано на С++ #include float speedBPLA, weightBPLA; float a[5]; float m[5]; float max = 0; float p; const float y = 3; const float l = 3; float t; const float T = 3; int main() { while (true) { cout << "Введите характеристики объекта:\n"; cout << "\tСкорость: "; cin >> speed; cout << "Введите характеристики БПЛА:\n"; cout << "\tСкорость: "; cin >> speedBPLA; cout << "\tВес: "; cin >> weightBPLA; while (true) { cout << "Введите характеристики региона:\n"; cout << "\tВысота гор"; cin >> height; cout << "\tПогода"; cin >> weather; cout << "Введите вероятности возникновения каждой из помех:\n"; for (int i = 0; i < 5; i++) { cin >> a[i]; } cout << "Введите вес каждой помехи:\n"; for (int i = 0; i < 5; i++) { cin >> m[i]; } for (int i = 0; i < 5; i++) { p += a[i] * m[i]; if (a[i] * m[i] > max) max = a[i] * m[i]; } if (p < y && max < l) { cout << "Возможная точка перехода рассматривается"; cin >> t; if (t <= T) { break; } } else { cout << "Возможная точка перехода не рассматривается"; } } bool end = false; cin >> end; if (end) { cout << "Достигнута точка назначения"; return 0; } } } Приложение 4. Программа выбора наилучшей траектории полёта беспилотного летательного аппарата. Написано на C++ #include #include #include int x, y, z; coord(int x = 0, int y = 0, int z = 0) { this->x = x; this->y = y; this->z = z; } coord& operator=(const coord& right) { this->x = right.x; this->y = right.y; this->z = right.z; return *this; } coord operator+ (const coord& right) { return coord(this->x + right.x, this->y + right.y, this->z + right.z); }; }; coord _move[5]{ coord(0, 1, 0), coord(0, -1, 0), coord(1, 0, 0), coord(-1, 0, 0), coord(0, 0, 1) }; const char* napr[5] = { "вверх: ", "вниз: " , "вправо: " , "влево: " , "вперед: " }; int main() { float z, Z, n, min = FLT_MAX; int min_napr = 0; coord *xyz; SetConsoleCP(1251); SetConsoleOutputCP(1251); cout << "Введите количество шагов траектории: \nn: "; cin >> n; xyz = new coord[n + 1]; cout << "Введите координаты БПЛА: \nx: "; cin >> xyz[0].x; cout << "y: "; cin >> xyz[0].y; cout << "z: "; cin >> xyz[0].z; for (int i = 0; i < n; i++) { system("cls"); min = FLT_MAX; cout << "Координаты траектории (x, y, z): \n"; for (int j = 0; j < i + 1; j++) cout << xyz[j].x << " " << xyz[j].y << " " << xyz[j].z << endl; cout << "Введите потери относительно z-го фактора (z[i]) и максимально допустимое значение для ВС относительно z-го фактора(Z[i]): \n"; for (int j = 0; j < 5; j++) { cout << napr[j] << "\nz[" << j << "]: "; cin >> z; cout << "Z[" << j << "]: "; cin >> Z; float L = z / Z; if (min > L) { min = L; min_napr = j; } } xyz[i + 1] = xyz[i] + _move[min_napr]; } system("cls"); cout << "Координаты траектории (x, y, z): \n"; for (int i = 0; i < n + 1; i++) cout << xyz[i].x << " " << xyz[i].y << " " << xyz[i].z << endl; } |