Электропривод. Синтез системы управления двигателем постоянного тока с регуляторами класса входвыход в программной среде Mexbios
 Скачать 1.19 Mb. Скачать 1.19 Mb.
|

|
17. Следующим этапом будет сборка контура тока. Первым делом необходимо добавить в формулу ссылки на нужные теги. В формулу Current_loop из формулы GUI необходимо добавить ссылку на тег CS_MODE, a из формулы DCM_MODEL ссылку на тег ia. Следующим этапом будет добавление блоков и их соединение согласно рисунку 21.
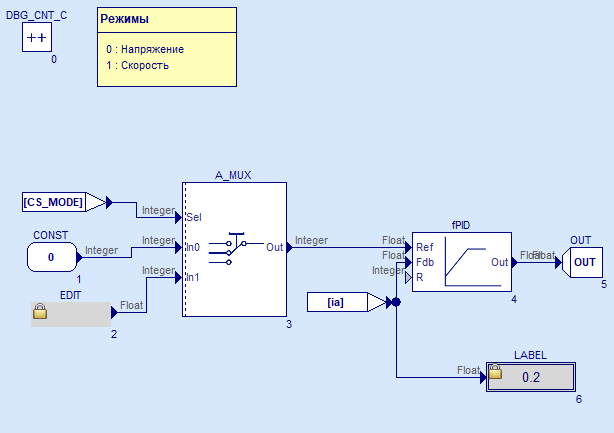 Рисунок 21 – Содержимое формулы Current_loop 18. Следующий этап – это переход к настройке контура скорости. Первым делом необходимо добавить в формулу ссылки на нужные теги. В формулу Speed_loop из формулы GUI необходимо добавить ссылку на тег CS_MODE, a из формулы DCM_MODEL ссылку на тег wr. Следующим этапом будет добавление блоков и их соединение согласно рисунку 22.
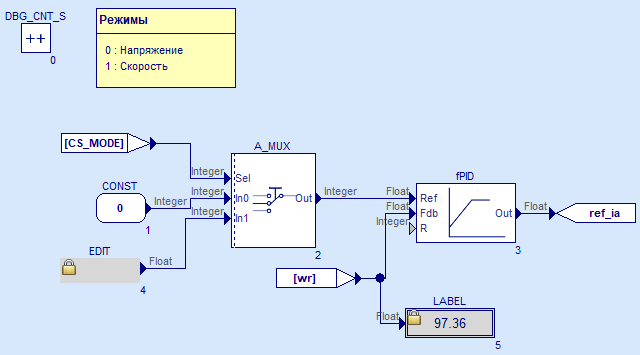 Рисунок 22 – Содержимое формулы Speed_loop После соединения всех блоков нужно создать ссылку на тег ref_ia, вырезать ее и вставить в формулу Current_loop (рисунок 23). 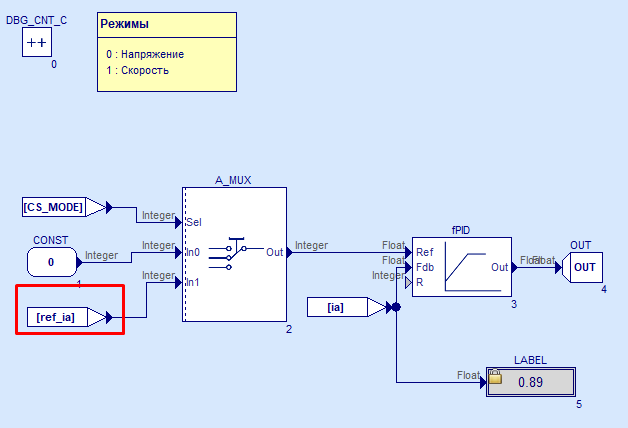 Рисунок 23 – Содержимое формулы Current_loop (замена EDIT на ссылку тега ref_ia) Далее необходимо проверить правильность работы контура скорости, для этого необходимо перейти в формулу GUI и в блоке RADIO_IN значение Value задать равным 1. После этого вернуться в формулу Speed_loop и запустить моделирование (время задать равным inf). Во время моделирования в блоке EDIT необходимо задать значение (например, 100). Если значение, отображаемое в блоке LABEL, будет совпадать (или будет близко) к заданному значению – значит коэффициенты ПИ-регулятора рассчитаны правильно и контур регулирования тока настроен правильно (рисунок 24). Если значения не совпадают, то настоятельно рекомендуем провести расчеты заново и поискать ошибку в настройках блоков или их соединении. В случае, если ошибок в настройках блоков и расчетах нет, но в системе присутствуют колебания необходимо попробовать самостоятельно подобрать коэффициенты регулятора. 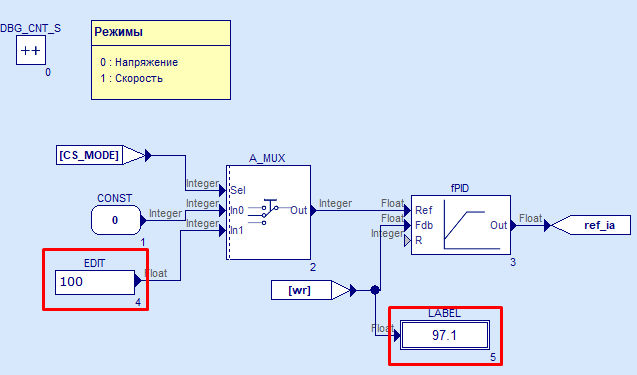 Рисунок 24 – Проверка настройки контура регулирования скорости 19. Если оба контура настроены и работают правильно, необходимо организовать управление скоростью с помощью виртуального пульта. Для этого необходимо перейти в формулу GUI и создать ссылку на тег ref_speed. После чего вырезать эту ссылку, вставить в формулу Speed_loop и подключить как на рисунке 25. 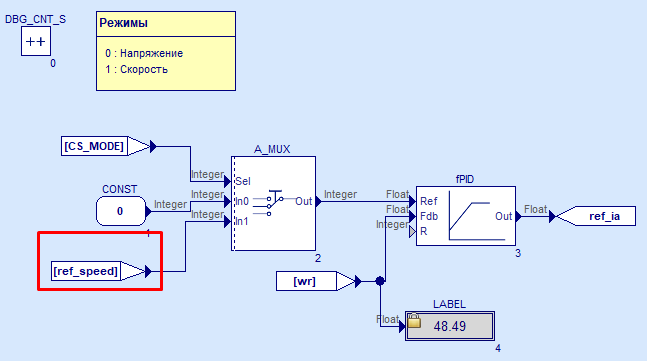 Рисунок 25 – Содержимое формулы Speed_loop (замена EDIT на ссылку тега ref_speed) Далее необходимо вернуться в формулу GUI (для наглядности можно отключить показ блоков и линий, нажав на кнопку «Показать/скрыть блоки и линии» (рисунок 26) и запустить моделирование. 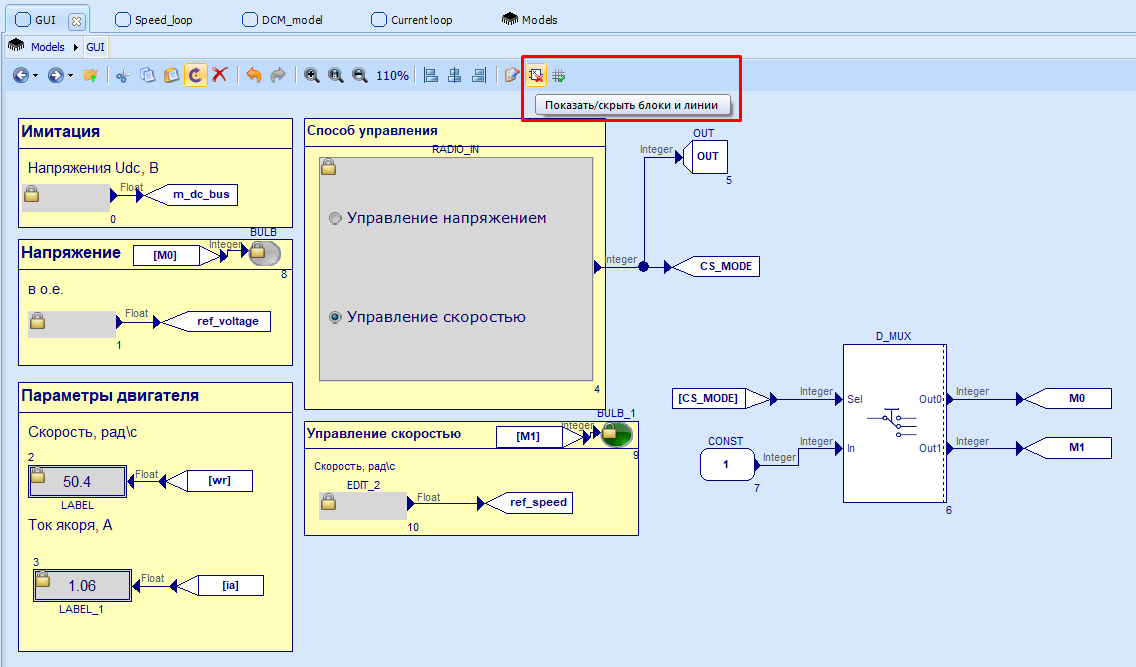 Рисунок 26 – Отключение показа блоков и линий 20. Далее необходимо запустить моделирование (время моделирования задать равным inf) и проверить работоспособность системы управления. Если система управления работает правильно, то можно перейти к проведению опытов. Опыт 1: Управление напряжением без нагрузки. Перед началом опыта необходимо убедиться, что в формуле GUI включен показ блоков и линий. Далее во вкладке «Встроенные» необходимо выбрать блок SCOPE. Если дважды кликнуть левой кнопкой мыши по блоку, то он откроется. В открытом блоке SCOPE на верхней панели открыть вкладку «параметры SCOPE» (изображен молоток). Задать параметры как на рисунке 27. 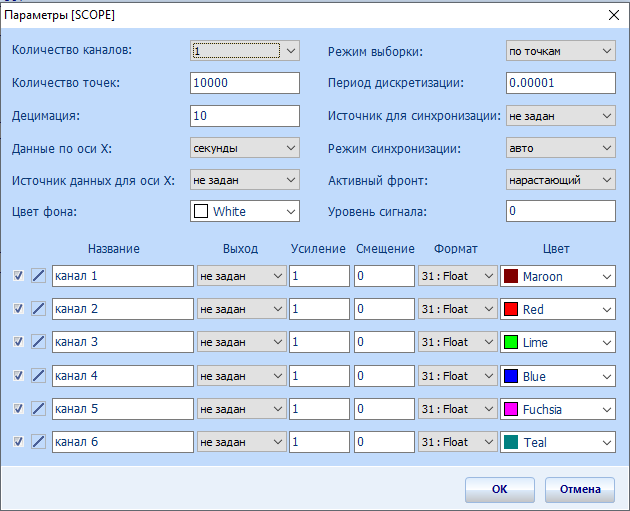 Рисунок 27 – Параметры блока SCOPE Создать второй блок SCOPE с такими же параметрами и подключить их как на рисунке 28. 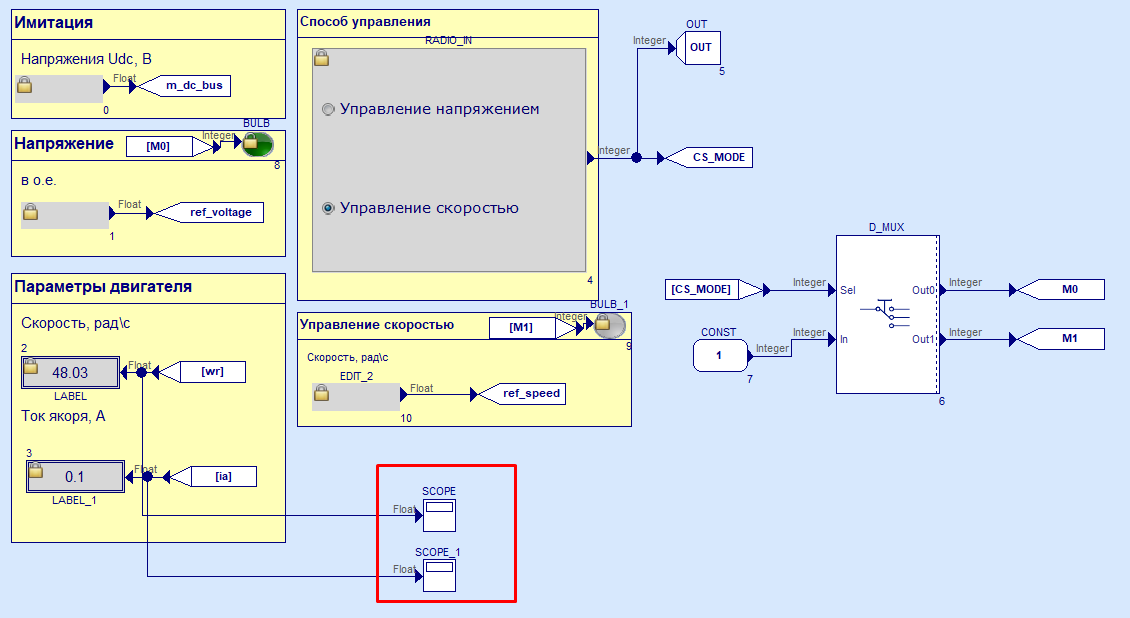 Рисунок 28 – Подключение блоков SCOPE Соответственно, один из блоков будет показывать скорость, а другой ток. Далее необходимо выбрать блок RADIO_IN, и задать значение параметра Value = 0. После этого перейти к блоку задания напряжения на виртуальном пульте и задать значение 0,5. Следующим этапом будет запуск моделирования (время моделирования задать равным 0,1). Полученные графики необходимо сохранить, сделав скриншот или нажав на кнопку сохранения в блоке SCOPE, также полученные графики необходимо добавить в отчет по лабораторной работе. Пример результата: 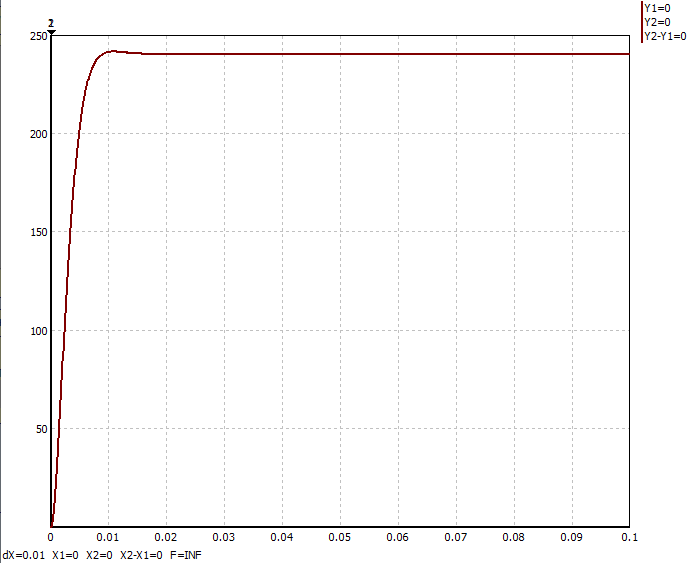 (а) 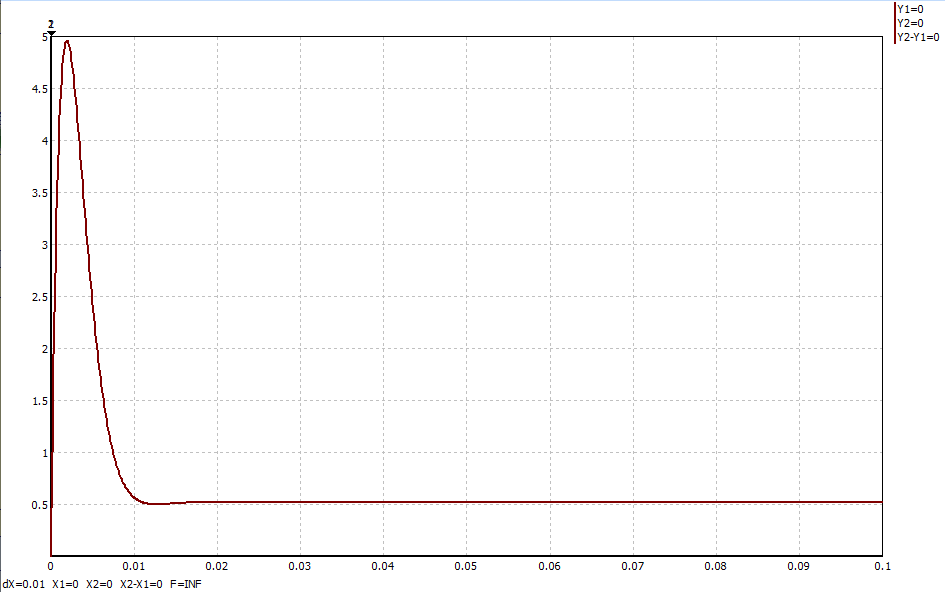 (б) Рисунок 29 – Пример результата Опыта 1 (а – переходный процесс по скорости, б – переходный процесс по току) Опыт 2: Управление скоростью без нагрузки. Необходимо выбрать блок RADIO_IN, и задать значение параметра Value = 1. После этого перейти к блоку задания скорости на виртуальном пульте и задать значение 100. Следующим этапом будет запуск моделирования (время моделирования задать равным 0,1). Полученные графики необходимо сохранить, сделав скриншот или нажав на кнопку сохранения в блоке SCOPE, также полученные графики необходимо добавить в отчет по лабораторной работе. Пример результата:  (а)  (б) Рисунок 30 – Пример результата Опыта 2 (а – переходный процесс по скорости, б – переходный процесс по току) Опыт 3: Управление скоростью с постоянной нагрузкой. Необходимо выбрать блок RADIO_IN, и задать значение параметра Value = 1. После этого перейти к блоку задания скорости на виртуальном пульте и задать значение 100. Далее необходимо перейти в формулу DCM_MODEL, добавить константу с параметрами: Формат = Float, Value = 0,5 ⋅ MC = 0,5 ⋅ C ⋅ Iн и подключить как показано на рисунке 31. 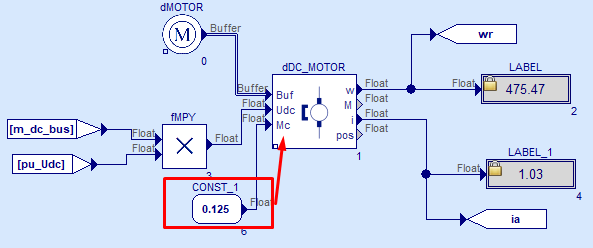 Рисунок 31 – Добавление постоянной нагрузки к двигателю Следующим этапом будет запуск моделирования (время моделирования задать равным 0,1). Полученные графики необходимо сохранить, сделав скриншот или нажав на кнопку сохранения в блоке SCOPE, также полученные графики необходимо добавить в отчет по лабораторной работе. Пример результата: 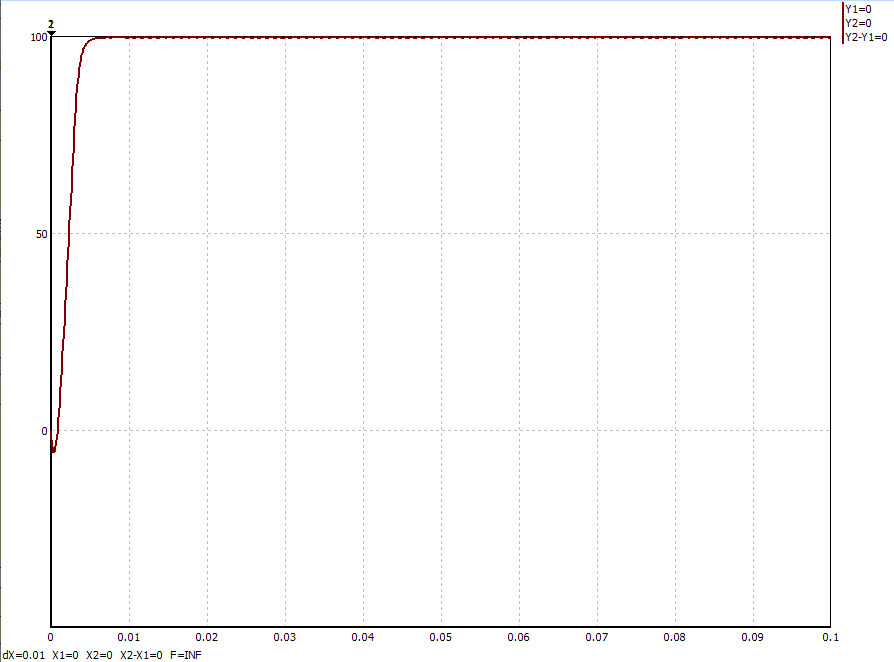 (а) 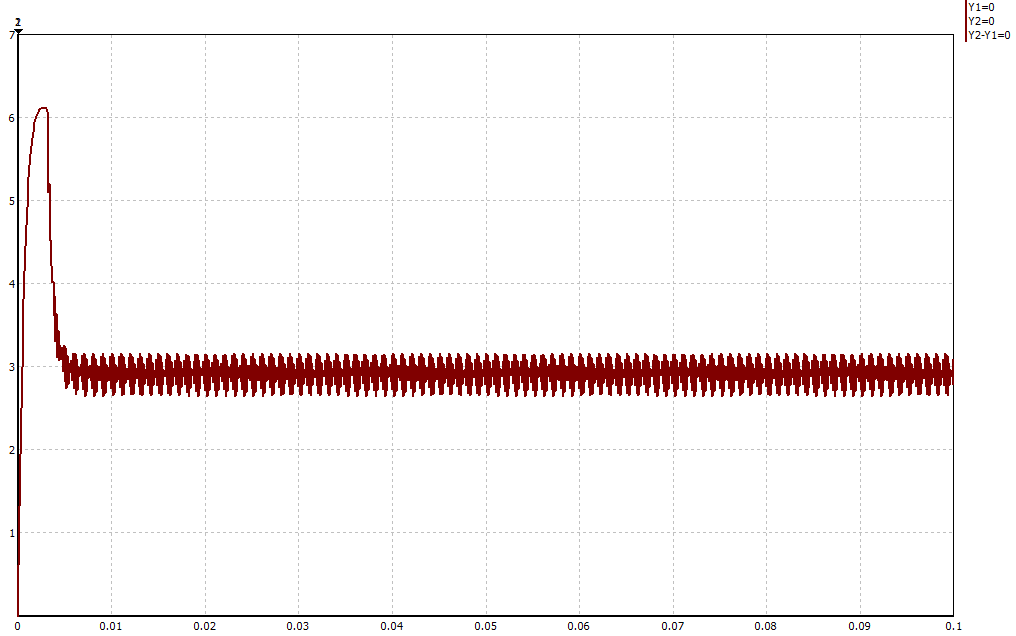 (б) Рисунок 32 – Пример результата Опыта 3 (а – переходный процесс по скорости, б – переходный процесс по току) Содержание отчета: Титульный лист, отвечающий требованиям к оформлению лабораторных работ. Цели работы. Строка параметров ДПТ в соответствие с заданием (таблица 1). Результаты расчета параметров ДПТ, синтеза ПИ-регуляторов контура тока и скорости. Результаты анализа системы управления ДПТ в виде рисунков-графиков с указанием начальных условий в каждом из 3-х опытов. Выводы по результатам исследования. Контрольные вопросы: Как проводить проверку знаков обратных связей? Как производить корректировку коэффициентов ПИ-регулятора? Какие методики настройки применяются для каждого контура? Объясните схемы контура тока. Объясните схему контура скорости. Почему контура регулирования рассчитываются на разных частотах? Как это проверить? Как добиться максимального быстродействия для контура регулирования? В чем различие методики настройки на МО и СО? Как ограничивать момент в системе подчиненного регулирования? |