Содержание 1 Вопрос 1 Конструкция сердечников трансформатора. 2
 Скачать 3.04 Mb. Скачать 3.04 Mb.
|

42. Схемы замещения асинхронной машины. Т-образные и Г-образные схемы замещенияПри практических расчетах вместо реального асинхронного двигателя, на схеме его заменяют эквивалентной схемой замещения, в которой электромагнитная связь заменена на электрическую. При этом параметры цепи ротора приводятся к параметрам цепи статора. По сути, схема замещения асинхронного двигателя аналогична схеме замещения трансформатора. Различие в том, что у асинхронного двигателя электрическая энергия преобразуется в механическую энергию (а не в электрическую, как это происходит в трансформаторе), поэтому на схеме замещения добавляют переменное активное сопротивление r2'(1-s)/s, которое зависит от скольжения. В трансформаторе, аналогом этого сопротивления является сопротивление нагрузки Zн. Величина скольжения определяет переменное сопротивление, например, при отсутствии нагрузки на валу, скольжение практически равно нулю s≈0, а значит переменное сопротивление равно бесконечности, что соответствует режиму холостого хода. И наоборот, при перегрузке двигателя, s=1, а значит сопротивление равно нулю, что соответствует режиму короткого замыкания. Как и у трансформатора, у асинхронного двигателя есть Т-образная схема замещения. 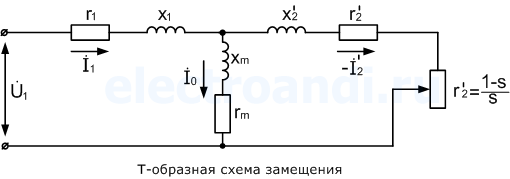 Более удобной при практических расчетах является Г-образная схемазамещения. 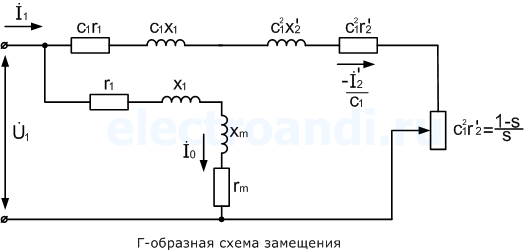 В Г-образной схеме, намагничивающая ветвь вынесена к входным зажимам. Таким образом, вместо трех ветвей получают две ветви, первая – намагничивающая, а вторая – рабочая. Но данное действие требует внесение дополнительного коэффициента c1, который представляет собой отношение напряжения подводимого к двигателю, к ЭДС статора.  Величина c1 приблизительно равна 1, поэтому для максимального упрощения, на практике принимают значение c1≈1. При этом следует учитывать, что значение коэффициента c1 уменьшается с увеличением мощности двигателя, поэтому более точное приближение будет соответствовать более мощному двигателю. Параметры схемы замещения рассматриваются подробнее в статье векторная диаграмма асинхронного двигателя 43. Приведение обмотки ротора к обмотке статора.Для построения векторной диаграммы осуществим приведение параметров обмотки ротора к параметрам обмотки статора. При этом обмотку ротора с числом фаз m2, обмоточным коэффициентом k2 и числом витков W2заменяют обмоткой с соответствующими параметрами статора m1, k1, W1, соблюдая при этом энергетический баланс в роторе. Методика приведения параметров асинхронного двигателя аналогична методике приведения вторичной обмотки трансформатора. При этом уравнение обмотки ротора (5.4) примет вид 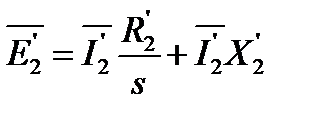 где     ; ; 44. Механический момент и механическая мощность АДКак уже говорилось, взаимодействие тока I2 в обмотке ротора с потоком асинхронной машины Ф создает механическую силу, приводящую ротор во вращение. При определении вращающего момента, создаваемого этой силой, необходимо исходить из известного физического соотношения, согласно которому мощность, затрачиваемая на приведение тела во вращение, определяется произведением приложенного к нему момента на скорость вращения данного тела. Как было указано в § 3, на ротор двигателя через вращающийся магнитный поток Ф передается некоторая электромагнитная мощность, рассчитываемая по формуле (33). Однако не вся мощность, переносимая на ротор магнитным потоком, расходуется на приведение его во вращение, поскольку часть ее тратится на нагревание проводников обмотки ротора. Механическая мощность двигателя, равная разности электромагнитной мощности и мощности потерь [см. формулу (34)], будет равна произведению вращающего момента на частоту вращения ротора: Рмех = Мп/9,55, (39) где М — момент, Н∙м; n — частота вращения, об/мин. Частота вращения ротора может быть связана с частотой вращения магнитного поля машины, если вспомнить формулу (9), из которой следует: n = n1(1— s). (40) Во многих случаях для понимания сущности явлений, происходящих в асинхронной машине, полезно иметь в виду еще одно выражение для вращающего момента. Выше мы уже упоминали, что механическая сила, действующая на проводники ротора, создается в результате взаимодействия тока в проводниках обмотки ротора с магнитным полем. Момент асинхронного двигателя можно рассчитать, зная значение приведенного тока в роторе и потока машины М = cмI2Фмакс cos ψ2 , (43) где ψ2 — угол сдвига между э. д. с. Е'2, наводимой в роторе и током ротора I'2; cм — постоянный коэффициент; Фмакс — магнитный поток, Вб; I'2 — ток ротора, А. В области малых скольжений асинхронной машины справедливой является приближенная формула М = cмI'2Фмакс , (44) поскольку cos ψ2 при малых скольжениях близок к единице |