Учебнометодическое пособие по проведению практических занятий по дисциплине Инженерная геодезия
 Скачать 1.24 Mb. Скачать 1.24 Mb.
|

Обработка результатов теодолитной съемкиПоследовательность обработки данных измерений следующая Вычисляется сумма измеренных углов по всему ходу Σβизм.= β1 + β2 + β3, где β1,β2,β3 – измеренные углы. Σβизм.= β1=74˚02'13''+75˚50'40''+30˚07'10''=180˚00'03'' Вычисляется сумма теоретических сумма углов для замкнутого теодолитного хода Σ βтеор.=180∙(n-2), где n – число вершин замкнутого теодолитного хода. Σ βтеор.=180∙(3-2)= 180˚00'00'' Вычисляется практическая угловая невязка теодолитного хода (fβ) fβ= Σβизм.- Σ βтеор. fβ=180˚00'03''-180˚00'00''=+00˚00'03'' Вычисляется максимально допустимая угловая невязка (fβдоп.) β  f доп.=±2∙t· f доп.=±2∙t· где t – точность теодолита. β f доп.=±2∙20''∙  =±69''=±00˚01'09'' =±69''=±00˚01'09''β Если практическая угловая невязка fβне превышает f доп., то она распределяется равномерно по измеренным углам с противоположным знаком путем введения поправки V и получаем исправленные углы βиспр. V= - f , n βиспр.= βизм.+ V, V=- 03// = -01''. 3 Значение исправленных углов теодолитного хода вносятся в графу 3 табл. 2. Выполняется контроль: сумма исправленных углов в замкнутом теодолитном ходе должна быть равна Σ βтеор. Σ βиспр.= Σ βтеор.= 180˚00'00'' Полученные суммы и величины из п. 1-6 обработки необходимо внести в ведомость подсчета вершин теодолитного хода через две строки после последней вершины (3) в соответствующие графы табл. 2. Вычисляются дирекционные углы сторон теодолитного хода. Дирекционный угол α1-2 выдается преподавателем каждому студенту индивидуально. Остальные углы вычисляются по формулам: α2-3= α1-2+180˚- β2.исправ, α3-1=α2-3+180˚- β3.исправ. Если вычисленный дирекционный угол получается больше 360˚, то необходимо вычесть из него 360˚ и в дальнейшие вычисления подставлять уменьшенный угол. Выполняется проверка Α1-2= α3-1+180˚- β1.исправ. Вычисляются румбы сторон теодолитного хода по схеме (рисунок 13): 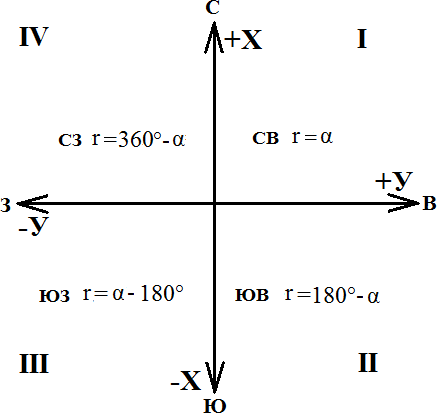 Рисунок 13Схема вычисления дирекционных углов и румбов сторон теодолитного хода Вычисляется периметр теодолитного хода P=D1-2+ D2-3+ D3-1 где D- длина стороны теодолитного хода. P= 128,95+247,00+249,00=624,95 м. Его необходимо записать в ведомость через 2 строки в графу 6. Вычисляются приращения координат по осям ΔX и ΔY: ΔX=D∙cos α, ΔY= D∙sin α, ΔX1-2= D1-2∙cos α1-2, ΔY1-2= D1-2∙sin α1-2, ΔX2-3= D2-3∙cos α2-3, ΔY2-3= D2-3∙sin α2-3, ΔX3-1= D3-1∙cos α3-1, ΔY3-1= D3-1∙sin α3-1. Вычисляется сумма приращений координат Σ ΔX= ΔX1-2 +ΔX2-3 +ΔX3-1, Σ ΔY= ΔY1-2 +ΔY2-3 +ΔY3-1. Теоретическая сумма приращений координат для замкнутого теодолитного хода должна равняться нулю Σ ΔXтеор.= 0, Σ ΔYтеор.= 0. Вычисляется практическая линейная невязка теодолитного хода по осям ОХ и ОY: fΔХ= Σ ΔX – Σ ΔXтеор, fΔY= Σ ΔY – Σ ΔYтеор. Вычисляется абсолютная линейная невязка:  fАБС.= fАБС.=Вычисляется относительная линейная невязка, причем она не должна превышать 1/2000 (для данных условий съемочных работ): fОТН.= fАБС. >1/2000 Р Если выполняется условие пункта 16, то практическая линейная невязка распределяется по приращениям координат с противоположным знаком пропорционально длине стороны теодолитного хода. Для этого подсчитывается поправки по осям ОХ и ОY – VΔX и VΔY: VΔX= - fХ DР , VΔY= - fY DР . Вычисляются исправленные приращения координат: ΔX1-2испр.= ΔX1-2+ VΔX1-2, ΔY1-2испр.= ΔY1-2+ VΔY1-2 Выполняется контроль: ΣΔXиспр.= ΣΔXтеор.=0, ΣΔYиспр.= ΣΔYтеор.=0. Вычисляются координаты точек теодолитного хода. Координаты первой точки теодолитного хода известны и выдаются преподавателем. Координаты остальных точек вычисляются по формулам: X2=X1+ ΔX1-2испр. ,Y2=Y1+ ΔY1-2испр., X3=X2+ ΔX2-3испр. ,Y3=Y2+ ΔY2-3испр.. Выполняется контроль: X1=X3+ ΔX3-1испр. Y1=Y3+ ΔY3-1испр. Все полученные результаты вычислений заносятся в ведомость вычисления координат вершин теодолитного хода (табл. 2). Таблица 2 Ведомость вычисления координат вершин теодолитного хода
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||