лдошгргщш. 13 Регуляторы. 1. Класс и ф и к
 Скачать 0.65 Mb. Скачать 0.65 Mb.
|

|
13 Регуляторы План: 1. Классификация регуляторов. 2. Конструкция и принцип действия регуляторов.  1. Автоматическое управляющее устройство, работающее по замкнутому циклу и предназначенное для стабилизации какого-либо параметра, называется регулятором. 1. Автоматическое управляющее устройство, работающее по замкнутому циклу и предназначенное для стабилизации какого-либо параметра, называется регулятором.Автоматический регулятор представляет собой совокупность устройств, присоединенных к управляемому объекту для регулирования его выходной величины. К выходу объекта присоединяется измерительный элемент, контролирующий выходную величину, а к регулирующему органу объекта исполнительный элемент. При отклонении регулируемого параметра объекта от заданного значения регулятор в соответствии с заложенным в него законом формирует управляющее воздействие на регулирующий орган, чтобы уменьшить отклонение.  Регуляторы классифицируют по следующим признакам: по виду регулируемого параметра, по виду регулирующего воздействия, по роду энергии, по конструктивному выполнению, по закону регулирования. Регуляторы классифицируют по следующим признакам: по виду регулируемого параметра, по виду регулирующего воздействия, по роду энергии, по конструктивному выполнению, по закону регулирования.По видурегулируемогопараметрарегуляторы делятся на регуляторы температуры, давления, уровня, частоты вращения, напряжения, мощности и др. По видурегулирующеговоздействиярегуляторы подразделяются на регуляторы прямого действия, у которых энергия для перемещения регулирующего органа развивается в результате изменения регулируемого параметра, и регуляторы непрямого действия, использующие энергию постороннего источника. По роду энергии регуляторы подразделяются на электрические, пневматические, гидравлические и комбинированные. Конструктивно только простейшие регуляторы прямого действия могут представлять единое изделие, включающее измерительный и исполнительный элемент, объединенный с регулирующим органом. В большинстве случаев под регулятором понимают устройство, принимающее сигнал от первичного преобразователя или ИП и формирующее управляющий сигнал, который передается на исполнительный элемент. Такие устройства называют устройствами «центральной части», так как они непосредственно с управляемым объектом не связаны. Конструктивно устройства «центральной части» регуляторов могут иметь исполнение нескольких типов: аппаратного, приборного, блочного и элементного. Регуляторы аппаратноготипавыполнены в виде отдельного устройства, к которому подсоединяются ИП и исполнительное устройство, например регуляторы температуры типа РТ-1, ТУДЭ, ПТР. В регуляторах приборноготипасигнал ИП поступает на вторичный прибор, а с него - в регулятор. Например, автоматический электронный мост типа МСР имеет вторичный реостатный задатчик, с которого снимается сигнал и подается в регулятор. Регуляторы блочноготипасостоят из отдельных блоков: измерительного, усилительного, задающего, усилителей мощности и др. Примером может служить комплекс приборов автоматического регулирования постоянного тока типа «Каскад». Блоки имеют нормализованные габариты и могут монтироваться на щите, в шкафу или на пульте. При элементном исполнении регулятор состоит из отдельных универсальных элементов, выполняющих простейшие операции. Из отдельных элементов построена система пневматических регуляторов «Старт» и др. Закон регулирования, который формирует регулятор, представляет зависимость между регулируемым параметром и положением затвора регулирующего органа. Регуляторы принято называть соответственно тому закону регулирования, который они реализуют. 120  2. Пропорциональный регулятор (П-регулятор) прямого действия, схема которого показана на рисунке 45, регулирует давление. Воспринимающим (чувствительным) элементом является мембрана 1, которая через шток 3 связана с регулирующим органом - клапаном 4.Пружина 2 служит задатчиком давления. 2. Пропорциональный регулятор (П-регулятор) прямого действия, схема которого показана на рисунке 45, регулирует давление. Воспринимающим (чувствительным) элементом является мембрана 1, которая через шток 3 связана с регулирующим органом - клапаном 4.Пружина 2 служит задатчиком давления.Если в качестве сервопривода используется электродвигательный или гидравлический исполнительный механизм, то они охватываются жесткой обратной связью (рисунок 46а). При достаточно большом значении kос регулятор в динамическом отношении будет усилительным звеном. Величина kосназывается пределом пропорциональности D.Если D >100%, то регулирующий орган перемещается только на часть полного хода при изменении х от минимума до максимума.  Примером П-регулятора непрямого действия может быть регулятор «Кристалл» с электрогидравлическим исполнительным механизмом ГИМ. С выходным валом исполнительного механизма жестко связан сердечник дифференциально трансформаторного преобразователя, выход которого присоединен к одному из выходов регулятора. Примером П-регулятора непрямого действия может быть регулятор «Кристалл» с электрогидравлическим исполнительным механизмом ГИМ. С выходным валом исполнительного механизма жестко связан сердечник дифференциально трансформаторного преобразователя, выход которого присоединен к одному из выходов регулятора.Основное достоинство П-регулятора - быстродействие. Его применяют для регулирования объектов без самовыравнивания и в тех случаях, когда в объектах наблюдаются частые отклонения нагрузки. Недостаток П-регулятора -остаточное отклонение регулируемого параметра. Рисунок 45 - Регулятор давления прямого действия  Интегральный регулятор (И-регулятор). В промышленных регуляторах И-закон регулирования получают в том случае, когда структурная схема регулятора составлена из последовательно включенных усилительного и интегрирующего звеньев (рисунок 46б). Интегральный регулятор (И-регулятор). В промышленных регуляторах И-закон регулирования получают в том случае, когда структурная схема регулятора составлена из последовательно включенных усилительного и интегрирующего звеньев (рисунок 46б).Интегрирующим звеном обычно служит гидравлический или электродвигательный исполнительный механизм. 121 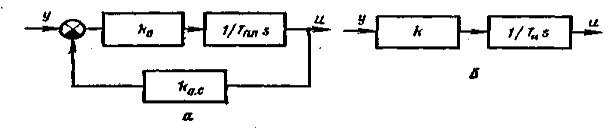 Рисунок 46 - Структурные схемы: а - П-регулятора; б - И-регулятора  В качестве примера И-регулятора можно представить регулятор «Кристалл» с гидравлическим исполнительным механизмом ГИМ, если не будет обратной связи. При отклонении регулируемого параметра у от заданного значения открывается электромагнитный клапан исполнительного механизма ГИМ и вода под давлением перемещает поршень, поворачивая выходной вал регулирующего органа до тех пор, пока отклонение регулируемого параметра от заданного значения не уменьшится до нуля. Когда отклонение равно нулю, электромагнитный клапан ГИМ закрывается и поршень (и, следовательно, вал привода) останавливается в этом положении. Скорость перемещения затвора регулирующего органа зависит от значения Ти.Чем больше Титем меньше скорость перемещения регулирующего органа. Если скорость перемещения велика, то даже при незначительном отклонении регулируемого параметра от заданного значения затвор успеет пройти из одного крайнего положения в другое и действие И-регулятора будет аналогично действию релейного регулятора. В качестве примера И-регулятора можно представить регулятор «Кристалл» с гидравлическим исполнительным механизмом ГИМ, если не будет обратной связи. При отклонении регулируемого параметра у от заданного значения открывается электромагнитный клапан исполнительного механизма ГИМ и вода под давлением перемещает поршень, поворачивая выходной вал регулирующего органа до тех пор, пока отклонение регулируемого параметра от заданного значения не уменьшится до нуля. Когда отклонение равно нулю, электромагнитный клапан ГИМ закрывается и поршень (и, следовательно, вал привода) останавливается в этом положении. Скорость перемещения затвора регулирующего органа зависит от значения Ти.Чем больше Титем меньше скорость перемещения регулирующего органа. Если скорость перемещения велика, то даже при незначительном отклонении регулируемого параметра от заданного значения затвор успеет пройти из одного крайнего положения в другое и действие И-регулятора будет аналогично действию релейного регулятора.Положительная особенность И-регуляторов заключается в том, что в установившемся режиме значение регулируемого параметра остается постоянным независимо от изменения нагрузки объекта, то есть И-регуляторы являются астатическими. Они допускают значительное изменение нагрузки. Недостаток И-регуляторов - большое время регулирования, поэтому они неприменимы на объектах без самовыравнивания. |