Курсавая по ТММ. Курсовой ТММ. 1 Курсты жобалауа техникалы тапсырма
 Скачать 475.13 Kb. Скачать 475.13 Kb.
|

|
Мазмұны
Кіріспе Механизм - талап етілетін қозғалыстар мен күштердің берілісіне арналған қатты және дифференциалданатын денелер жүйесі. Механика тұрғысынан алып қарағанда, механизм, байланыстырушы механикалық жүйе болып табылады. Бірақ, кез келген мұндай жүйе механизм болып табыла бермейді. Мысалы: приборлар, құрылғылар, автоматтандырылған ағымдық желілер. Механизм ұғымы, құрамына осы механизм кіретін техникалық құрылғыны пайдаланумен тығыз байланыста емес. Механизмдер мен машиналар теориясы машиналарды зерттеу және құрастыру әдістерін біріктіретін ғылым. Механизмдер мен машиналар теориясы пәннің міндеті - механизмдердің негізгі түрлерінің құрылымы, қатаң және серпімді звенолы механизмдердің кинематикалық және динамикалық сипаттамалары, механизмдердің талапқа сай параметрлерін анықтау тәсілдері,машина мен адамды дірілден қорғау әдістері және машиналар мен механизмдерді басқару жүйесі туралы білім беру. Барлық машиналар не қарапайым механизм болып табылады, не бірқатар механизмдерден тұрады. Осыдан механизмдер мен машиналар теориясының негізгі міндеттері бөлініп шығады: -механизмдерді талдау, яғни белгілі немесе жобаланатын механизм-дердің құрылымын, кинематикасын және динамикасын зерттеу, зерттеу мақсаты оларды жетілдіру, сонымен қатар берік және механикалық есептер үшін деректер алу. -механизмдер синтезі, яғни механизмдердің жаңа берілген талаптарына сәйкес әзірлеу. Механизмдердің құрамына енетін бір немесе бірнеше өзара қатаң қосылған қатты денелерді мүше деп атайды. 1 Курстық жобалауға техникалық тапсырма 1.1 Кіріс параметрлер және жобаланатын механизмдердің сұлбалары  =13 =13 =30 =30 =4 мм =4 мм =1270 айн/мин =1270 айн/мин =80 об/мин =80 об/мин =4 мм =4 ммk=3  =0,14 м =0,14 м =0,28 м =0,28 м =0,15 м =0,15 м =0,55 м =0,55 мa=0,01 м b=0,02 м  =0,40 м =0,40 м =0,70 м =3 кг =0,70 м =3 кг =22 кг =22 кг =5 кг =5 кг =35 кг =35 кг =0,60 =0,60   0,15 0,15  2,1 кН 2,1 кН =120˚ =120˚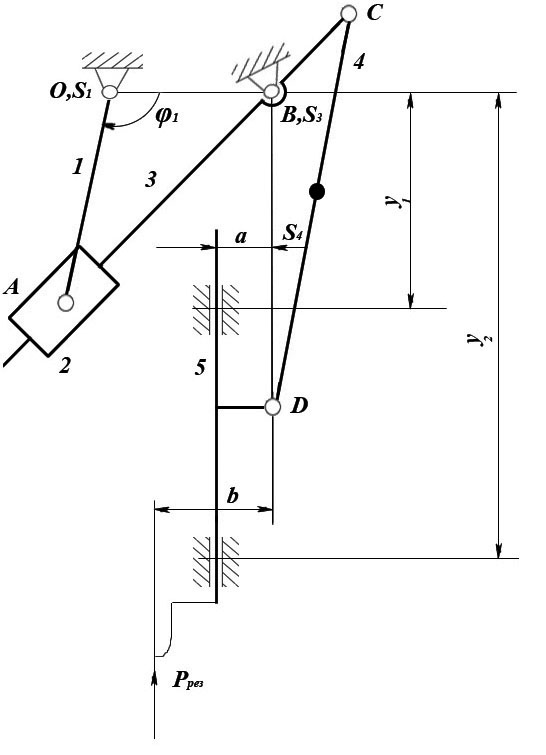 Сурет 1-Иінтіректі механизм сызбасы  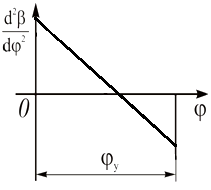 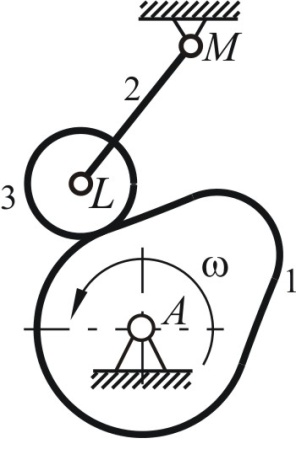 Сурет 2-Тісті және жұдырықшалы механизмдер сызбасы 1.2 Машина жұмысын сипаттау Бұл курстық жобада қашау станогының механизміне анализ жасалған. Жоба нақты зерттеу мен есептеу арқылы, нақты инженерлік тапсырманы табуға көмектеседі. Жобалық механизмді есептегенде құрылымдық, метрикалық, кинематикалық және динамикалық жағдайларды ескеру қажет. Мысалы, механизмде алшақтық қадам жасалғанда, жұдырықша механизмін қолдана отырып, ол айналып қозғалыс жасайды Бұл жобада ең жауапты этапта құрылымдық және кинематикалық схемасы саналады. Ол маңызды рөл атқарады. Жеке конструкторлық тораптарды және бөлшектерді сонымен қатар машинаның өнімділігін қасиетін ерекше анықтайды Кинематикалық тәртіппен әдіс арқылы зерттеу механизмнің құрылымдық анықтауға мүмкіндік береді. Қашау станогы бөлшектердің шүңқұырлары мен қуыстарын қашау үшін және де тік орналасқан беттерді сүргілеу үшін қолданылады. Тіс қашау станогымен тісті дөңғалақтар дайындалады. Кесу басында бекітілген қашау кескішімен металдың кесілуі жүзеге асырылады. Оған FT күші әсер етеді. Толық жүріс Н кесу құралы кесу ұзындығы ld және қайту ұзындығынан ln тұрады. Қосиін тісті редуктор арқылы электрқозғалтқышпен арқылы қозғалысқа келеді. Беру механизмі үстелі жұдырықшалы механизмнен және төрт топсалы иінтіректі механизмімен және құрылғыдан тұрады. Бұл беріліс үстелге бекітілген дайындамамен бірге бос жүріс соңында бастапқы циклограмма және жұмыс жүрісінің басында орындалады. 2 Механизмді құрылымдық талдау. 2.1 Иінтіректі механизмді құрылымдық талдау. Құрылған құрлымдық схама бойынша құрлымдық талдау жасаймыз. 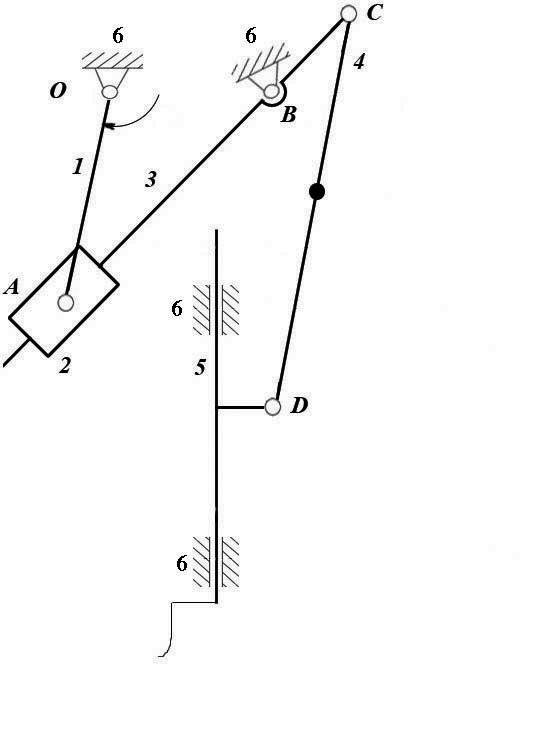 Cурет 2-Иінтіректі механизмнің құрылымы. 1 - қосиін 2 - сырғақ 3 - күйенте 4 - бұлғақ 5 - бұлғақ 6 - тірек O(1;6)V,B A(1;2)V,B A(2;3)V,П B(6;3)V,B C(3;6)V,B D(4;5)V,B E(5;6)V,П w=3n-2p5-p4=3∙5-2∙7=1 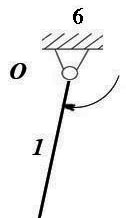 w=3n-2p5-p4=3-2=1 I класс 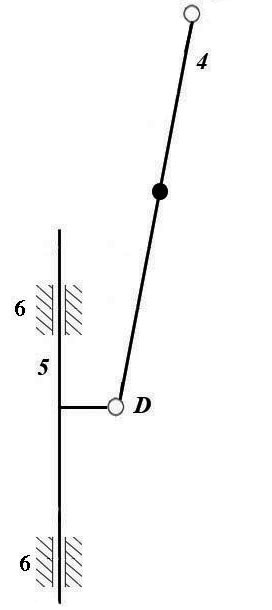 w=3n-2p5-p4=3∙2-2∙3=0 II классты Ассур тобы , II түрі 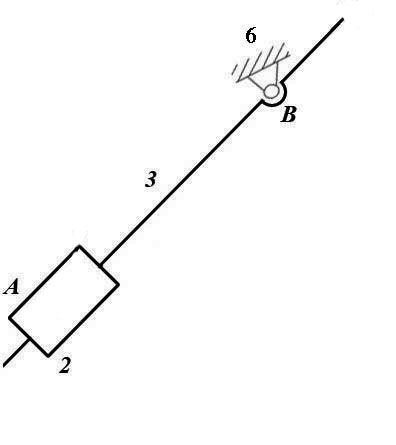 w=3n-2p5-p4=3∙2-2∙3=0 II классты Ассур тобы , II түрі I  (6;1) II(4;5) II(2;3) (6;1) II(4;5) II(2;3)II классатың 6-буынды механизм 2.2 Жұдырықшалы механизмді құрылымдық талдау 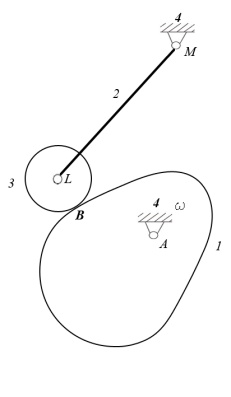 Сурет 4-Жұдырықшалы механизмді құрылымдық сызбасы 1 - жұдырықша 2 - күйенте 3 - ролик 4 - тірек A(1;4)V,B B(1;3)IV L(3;2)V,B M(2;4)V,B w=3n-2p5-p4=3∙3-2∙3-1=2 3 буын артық. w=3n-2p5-p4=3∙2-2∙2-1=1 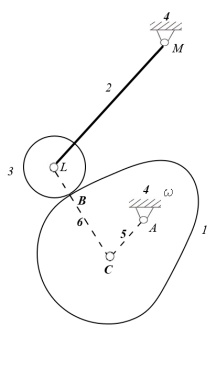 A(5;4)V,B С(5;6)V,B L(6;2)V,B M(2;4)V,B w=3n-2p5-p4=3∙5-2∙7=1 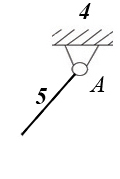 w=3n-2p5-p4=3∙1-2∙1=1 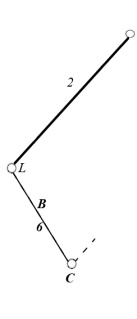 w=3n-2p5-p4=3∙2-2∙3=0 II классты Ассур тобы, 1 түр I (4;5) II(2;6)II классаты 4-буынды механизм. 3. Иінтіректі механизмді кинематикалық және күштік талдау 3.1 Механизм буындары мен нүктелерінің орындарын анықтау Механизм жеке буындарының ұзындықтарын біле отырып, механизм орны көрсетілген сызбада кинематикалық және күштік талдау жүргіземіз. Салуды ұзындықтардың масштабтық коэффициентін ескере отырып орындаймыз.  Масштабтық коэффициентін тауып  , сызбадағы OA, BC, CD буындарының ұзындықтарын табамыз. , сызбадағы OA, BC, CD буындарының ұзындықтарын табамыз.   Механизм сызбасында тұрғызғанда керек ұзындығын табамыз.   3.2 Механизм буындарымен нүктелерінің жылдамдықтарын анықтау Айналу жиілігі берілген, сол себепті бұрыштық жылдамдық ω1: Бұрыштық жылдамдық ω1 табылды, демек  нүктесінің жылдамдығы. нүктесінің жылдамдығы.   қосиіннің айналуына жағына бағытталған. Жылдамдықтар сызбасының полюсын таңдаймыз - р және жылдамдықтардың масштабтық коэффициентін µV деп белгілейміз. қосиіннің айналуына жағына бағытталған. Жылдамдықтар сызбасының полюсын таңдаймыз - р және жылдамдықтардың масштабтық коэффициентін µV деп белгілейміз.Полюстан кесінді сызамыз  , бұл сызбада нүктесінің жылдамдығын көрсетеін. Жылдамдықтардың масштабтық коэффициенті: , бұл сызбада нүктесінің жылдамдығын көрсетеін. Жылдамдықтардың масштабтық коэффициенті:  Жылдамдықтарды тұрғызу үшін біріншіден 2 және 3 топтардан бастаймыз, себебі олар бастапқы буынға, тірекке жалғанған. Тұрғызу келесі векторлық теңдеумен орындаймыз.    нүктесінен нүктесінен  векторлық жылдамдықтың бағыты векторлық жылдамдықтың бағыты  -қа параллель сызық жүргіземіз, содан кейін p нүктесінен жылдамдықтың бағыты A-ғаперпендикуляр сызық жүргіземіз. Қиылысу нүктесі -қа параллель сызық жүргіземіз, содан кейін p нүктесінен жылдамдықтың бағыты A-ғаперпендикуляр сызық жүргіземіз. Қиылысу нүктесі  векторлық жылдамдықтың соңын береді. векторлық жылдамдықтың соңын береді.    pс кесіндісі - жылдамдықтар сызбасында С нүктесінің жылдамдығын көрсетеді, ол келесі жолмен анықталады.     4 және 5 топтарының жылдамдықтар сызбасын тұрғызуға көшеміз. Бұл сызба келесі теңдеулермен тұрғызылады.   , ,      c векторының соңынан  жылдамдық векторын CD-ғабағытталған перпендикуляр вектор жүргіземіз. Полюстан жылдамдық векторын CD-ғабағытталған перпендикуляр вектор жүргіземіз. Полюстан  -ға параллель сызық жүргіземіз, бұл сызық алдынғы сызықпен қиылысқан кезде d векторының соңын береді.d - D нүктесінің жылдамдығы. -ға параллель сызық жүргіземіз, бұл сызық алдынғы сызықпен қиылысқан кезде d векторының соңын береді.d - D нүктесінің жылдамдығы.Соңынан барлық буындардың бұрыштық үдеулерін анықтаймыз.     3.3 Механизм нүктелері мен буындарының үдеуін анықтау Қосиініміз бірқалыпты айналғаны үшін, бізде:   Үдеулер сызбаснда π полюсынан кескін сызамыз π = 100 мм ||ОА, сонда үдеулер сызбасының масштабтық коэффициенті.   2 және 3 топтрының үдеулер сызбасын тұрғызамыз. Тұрғызу келесі векторлық теңдеумен орындалады.   мұнда  = = , ,  0 0Кориолистың үдеуі  нүктесінің 2 буынға байланысты үдеуге тең. нүктесінің 2 буынға байланысты үдеуге тең.  және вектор бағыты  жылдамдығына қатысты, бағыты бұрыштық жылдамдыққа 90 градус бұрылған. жылдамдығына қатысты, бағыты бұрыштық жылдамдыққа 90 градус бұрылған.  нүктесі арқылы нүктесі арқылы  үдеуін үдеуін  -ға параллель сызық жүргіземіз. нүктесінен кескін жүргіземіз ( k) - Кориолис үдеуінің векторы, оның ұзындығын келесі формула арқылы анықтаймыз: -ға параллель сызық жүргіземіз. нүктесінен кескін жүргіземіз ( k) - Кориолис үдеуінің векторы, оның ұзындығын келесі формула арқылы анықтаймыз:  Екінші векторлық теңдеуді құруға көшеміз.  нүктесінен кескін жүргіземіз нүктесінен кескін жүргіземіз  , нормаль үдеуін көрсететін , нормаль үдеуін көрсететін  . .   нүктесі арқылы нүктесі арқылы  бағыт жүргіземіз, алдынғы түзумен қилысқан нүкте бағыт жүргіземіз, алдынғы түзумен қилысқан нүкте  векторының соңын береді. векторының соңын береді.     табамыз: табамыз:   4 және 5 топтарының үдеулер сызбасын тұрғызуға көшеміз.     = =        2 мм-дан кішкентай болған соң сызбада ол көрсетілмейді. 2 мм-дан кішкентай болған соң сызбада ол көрсетілмейді.Енді тангенсаль үдеулер мен бұрыштық үдеулерді табамыз.  4,08 4,08    4 Иінтіректі механизмді күштік талдау Әр буынның ауырлық күшін анықтаймыз  ; ; ; ; ; ; . .Инерция күштері:  ; ; . .Буындардың инерция күштерінің моменттерін келесі жолмен анықтаймыз.  , ,мұнда IS - инерция моменті (кг·м2), - буынның бұрыштық үдеуі (1/с2). DC, BC және DE буындар:  ; ; . .4.1 Ассур 4-5 тобын күштік талдау Механизмнің күштік талдауы бастапқы буыннан алшақ орналасқан топтан басталады, біздің жағдайымызда ол 4-5 топтар. Топтың тепе-теңдігін құрайтын жалпы теңдеу құраймыз, ол топқа әсер ететін барлық күштердің қосындысы нөлге тең болуы.  Бұл топта R65, R34 және R45= - R54 кинематикалық жұптардың белгісіз реакциялар, сол себепті оларды келесі теңдеумен табуға болады. 1.  ; ; , ,мұнда күш иіні сызбадан алынып (мм), масштабтық коэффициентпен есептелінді (м).  ; ; ; ; . .Демек,  4-5 Ассур топотарына күштер сызбасын тұрғызу үшін масштабтық коэффициентін  = 10 Н/мм таңдаймыз. = 10 Н/мм таңдаймыз.Векторлық теңдеуді шешіп,бізде.  ; ; ; ; . .4.2 Ассур 2-3 тобын күштік талдау Топтың тепе-теңдігін құрайтын жалпы теңдеу құраймыз, ол топқа әсер ететін барлық күштердің қосындысы нөлге тең болуы.  Бұл топта R12, R63 және R32 = - R23кинематикалық жұптардың белгісіз реакциялар, сол себепті оларды келесі теңдеумен табуға болады. 1.  ; ; , ,мұнда күш иіні сызбадан алынып (мм), масштабтық коэффициентпен есептелінді (м).  ; ;Демек,  2-3 Ассур топотарына күштер сызбасын тұрғызу үшін масштабтық коэффициентін = 10 Н/мм таңдаймыз.Векторлық теңдеуді шешіп,бізде.  ; ;  4.3. Бастапқы буынға күштік талдау Топтың тепе-теңдігін құрайтын жалпы теңдеу құраймыз, ол топқа әсер ететін барлық күштердің қосындысы нөлге тең болуы.  Бұл топта бастапқы буынның тірек жағынан R6-1 және теңестіру моменті МУР белгісіз реакциялар, сол себепті оларды келесі теңдеумен табуға болады. R6-1 реакциясы тұрғызуда табылады.  ; ;  Теңестіру моменті Мур О шарнирына байланысты моменттер теңдеуінен табылу мүмкін. 1.  , ,  , ,мұнда  ; ;МУР,  . .5 Тісті механизмінің синтезі 5.1 Қарапайым берілістің синтезі Тістер саны: z4=13, z5=30;  Негізгі геометриялық параметрлерді есептеу. Осьаралық бөлінетін арақашықтық  Ығысулар соммасының коэффициенті  Профиль бұрышы  Ілініс бұрышы  1-кесте бойынша  Бөлінетін диаметр тістегеріште  доңғалақта  Осьаралық арақашықтық  Беріліс қатынасы  Бастапқы диаметр тістегеріште  , ,доңғалақта  . .Қабылданатын ығысу коэффициенті  Теңдеуші ығысу коэффициенті  Тіс ұштарының диаметрі тістегеріште  , ,доңғалақта  Ойыстардың диаметрі тістегеріште  , , доңғалақта  . .Тістің биіктігі  . . Негізгі диаметр тістегеріште  , ,доңғалақта  . .Есептеу қадамы  . .Ілінісу қадамы  . .Бөлінетін шеңбер бойынша тістің қалыңдығы  . . Ара жабын коэффициенті  , ,Есептеуден кейін сыртқы эвольвентті іліністі А1 форматында 2:1 масштабында сызамыз. Бүкіл өлшемдерді сызбада көрсетеміз. 5.2 Планетарлық редуктордың синтезі Бүкіл механизмнің беріліс қатынасын анықтаймыз.  ; ;  ; ; Тстер таңдаймыз  Осьтестік жағдайынан екінші доңғалақ тістерінің санын анықтаймыз.  Көршілесу жағдайының орындалу немесе орындалмау деңгейі.  - сыртқы ілініс - сыртқы ілінісСателиттерді жинау жағдайының орындалу немесе орындалмау деңгейі.  шарт орындалады. Талап етілетін беріліс қатынасына жүзеге асыратын қателігі  5.3 Тісті механизмнің сызықтық және бұрыштық жылдамдықтарының суреттері Планетарлық редуктор мен қарапайым доңғалақтары диаметрлерін анықтаймыз және сызбаның масштабында  механизм сұлбасын сызамыз. механизм сұлбасын сызамыз.  Механизмнің жылдамдығын табамыз  Жылдамдықтардың масштабтық коэффициенті:  Планетарлы механизмның беріліс қатынасын келесі жолмен анықтаймыз   Бұрыштық жылдамдықтардың масштабтық коэффициенті:  6 Жұдырықшалы механизмінің синтезі 6.1 Кіріс буынынң кинематикалық диаграммалары  Жұдырықша механизм түріне байланысты А1-ге үдеу аналогы қисығын сызамыз:  -итергіші бар механизм үшін.Тұрғызу үшін келесі графикалық интегралдау қолданамыз: -итергіші бар механизм үшін.Тұрғызу үшін келесі графикалық интегралдау қолданамыз:- 20 тең интервалдары бар қадамдардың кейбір санына абсцисса осін бөлеміз. - Интервалдардың ортасына сәйкес ординаталар жүргіземіз. - Р1 нүкте – полюсімен кесінділермен қосылады. - Келесі жылдамдықтар аналогы қисықтары алынады. Үдеу аналогы қисығын аламыз  мұнда:  Иінтірегіштің орын ауыстыру аналогы масштабтық коэффициентін анықтаймыз  Жылдамдықтар аналогы қисықтық масштабын анықтаймыз   коэффициентін табамыз коэффициентін табамыз 6.2 Жұдырықшаның ең төменгі радиусын анықтау М еркін алынған нүктесінен 1-ші күйенте ұзындығын тең доға жүргіземіз. Содан кейін кинематикалық диаграмма бойынша  , ,  шамасында күйентенің Во нүктесінен шығатын бірнеше жағдайын анықтаймыз. ВоВ1, ВоВ2,…доғаларын формуладан шығатын хордалармен алмастырамыз. шамасында күйентенің Во нүктесінен шығатын бірнеше жағдайын анықтаймыз. ВоВ1, ВоВ2,…доғаларын формуладан шығатын хордалармен алмастырамыз. мұнда уi – график ординатасы , мм.Сызбаның масштабтық коэффициенті:  В1, В2,… нүктелері арқылы күйенте айналмасынан сәулелер жүргіземіз, яғни  мәнлері күйентенің айналма центірінің көтерілім фазасында қалады. мәнлері күйентенің айналма центірінің көтерілім фазасында қалады.  A жұдырықшасының айналу центрінен жіберілетін мүмкіндік аймағы Bibi қимасындағы Сызбада  центрлік профильдегі жұдырықшаның ең кіші радиусын және жұдырықша айналмасы мен күйентенің центрлерінің арақашықтығы центрлік профильдегі жұдырықшаның ең кіші радиусын және жұдырықша айналмасы мен күйентенің центрлерінің арақашықтығы  табамыз. табамыз.6.3 Жұдырықшаны профильдеу Ro, l және lo берілген мәндері бойынша АВоМ үшбұрышын саламыз. М күйентенің центрінен радиусы 1-ге тең  доғасы жүргізіледі, яғни мұнда доғасы жүргізіледі, яғни мұнда  бұрышы қалады және оны тең n бөлікке бөлеміз. Жұдырықша профилінің нүктелері О жұдырықшасының айналма центрі мен В1,…В10 арқылы жүргізілген шеңберлердің доғаларының қиылысуынан пайда болады, ал 1, 2, …20 нүктелері арқылы жүргізілген шеңбер доғаларын қисық сызық қосады. Содан кейін формула арқылы радиусын тауып, роликпен профиль жүргіземіз. бұрышы қалады және оны тең n бөлікке бөлеміз. Жұдырықша профилінің нүктелері О жұдырықшасының айналма центрі мен В1,…В10 арқылы жүргізілген шеңберлердің доғаларының қиылысуынан пайда болады, ал 1, 2, …20 нүктелері арқылы жүргізілген шеңбер доғаларын қисық сызық қосады. Содан кейін формула арқылы радиусын тауып, роликпен профиль жүргіземіз. Қабылдаймыз r=30 мм. Сызбаларды мына масштабпен сызамыз .Пайдаланылған әдебиеттер 1. Палев П.П., Филиппова Т.С. Механизмдер мен машиналар теориясы курстық жобалау.Қ: Машина жасау, 2008. 2. Палев П.П., Тайманова Г. К., Филиппова Т. С. Механизмдер мен машиналар теориясының курсы.Қ. 2007. 3. Артоболевский И.И. Теория механизмов и машин. – М: Наука, 1988. 4.Т.К.Нургалиев , Сыздықов Ж.А. “Механизмдер теориясы”2001 ж |