Местность. 1 местность и ее значение в бою
 Скачать 2.18 Mb. Скачать 2.18 Mb.
|

|
Глава 6 ОРИЕНТИРОВАНИЕ НА МЕСТНОСТИ С ПОМОЩЬЮ НАВИГАЦИОННОЙ АППАРАТУРЫ Назначение навигационной аппаратуры. В сложной обстановке современного боя даже временная потеря ориентировки приводит к нарушению взаимодействия между подразделениями, ставит под угрозу успешное выполнение боевых задач. Поэтому для надежного и быстрого ориентирования на местности применяется навигационная аппаратура, которой оснащены многие виды боевых и специальных машин. Она используется главным образом при действиях подразделений на местности, бедной ориентирами, а также при плохой видимости. В настоящее время наиболее широкое распространение получили гирополукомпасы и навигационная аппаратура с координатором. Гирополукомпас (ГПК) предназначен для выдерживания заданного направления движения боевой машины. Координатор предназначен для непрерывной автоматической регистрации местоположения движущейся машины, направления ее движения и направления на конечный пункт маршрута. Он может быть также использован для целеуказания и нанесения на карту не обозначенных на ней дорог, колонных путей, зон затопления, границ зараженных участков и других объектов. Принцип работы навигационных приборов. В основе работы навигационных приборов использовано свойство быстро вращающегося волчка—сохранять неизменным направление оси вращения в пространстве. На таком принципе работает специальное устройство—гироскоп, основная часть гирополукомпаса и навигационной аппаратуры с координатором, поэтому эти приборы называют гироскопическими. Они не подвержены влиянию магнитного поля Земли, устойчиво работают в районах магнитных аномалий и в северных широтах, где часто происходят магнитные бури.  Устройство гироскопа. Гироскоп состоит из ротора 1 (рис. 79) и карданного подвеса. При работе гироскопа его ротор (тяжелый симметричный маховик) с большой скоростью вращается вокруг оси X, закрепленной на подвижной внутренней рамке 2. Эта рамка, в свою очередь, может вращаться по оси Y, закрепленной на наружной рамке 3. Наружная рамка вместе с внутренней и ротором может вращаться по оси Z, которая прикреплена на шарикоподшипниках к основанию 4. Таким образом, ротор гироскопа имеет возможность свободно вращаться вокруг трех осей, т. е. он имеет три степени свободы. Такой гироскоп называется трехстепенным. Система двух подвижных рамок и закрепленной в них оси вращения ротора образует карданный подвес. Ось X, вокруг которой вращается ротор, называется главной осью гироскопа. Главная ось гироскопа вследствие вращения Земли и трения в подшипниках с течением времени постепенно отклоняется от своего первоначального положения как по азимуту, так и в плоскости горизонта. Чтобы исключить такой уход главной оси, в навигационных приборах имеются специальные корректирующие устройства. Если гироскоп установить в машине, то при любом ее повороте ось вращающегося ротора всегда будет показывать определенное, заранее установленное направление (рис. 80). 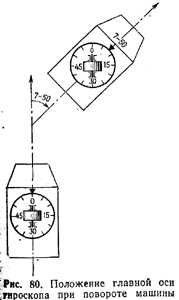 6.1. Выдерживание направления движения с помощью гирополукомпаса Устройство гирополукомпаса. Гирополукомпас состоит из гиромотора, карданного подвеса, корректирующих устройств и арретира. Все это помещено в металлическом корпусе / (рис. 81), который жестко крепится к машине. На передней плате корпуса имеется смотровое окно, на стекле которого нанесена прямая линия (индекс)—указатель 3 отсчета. В смотровом окне видна курсовая шкала 4, закрепленная на наружной рамке гироскопа (карданном подвесе). Шкала проградуирована в делениях угломера. Одно деление шкалы равно 0-20 (около 1°).  Сущность работы гирополукомпаса заключается в следующем. При изменении направления движения вместе с машиной повернется на тот же угол и корпус гирополукомпаса. Главная же ось гироскопа сохранит свое прежнее положение. Вместе с осью вращения ротора сохранит свое прежнее положение и курсовая шкала, указатель отсчета переместится вдоль курсовой шкалы на величину угла поворота машины. Например, первоначальный отсчет шкалы гироскопа был равен 2-40, новый отсчет после поворота машины равен 5-60, значит, машина повернула вправо на угол 3-20 (5-60—2-40=3-20). В гирополукомпасе имеются два корректирующих устройства. Азимутальное корректирующее устройство предназначается для устранения ухода главной оси гироскопа по азимуту, горизонтирующее устройство—для удержания главной оси гироскопа в плоскости горизонта. Корректирующими устройствами пользуются при балансировке гироскопа, чтобы в процессе его работы уход главной оси от заданного направления был минимальный. Величина коррекции зависит от географической широты местоположения машины. Балансировка гироскопа проводится при перемене района действий более чем на 4° по широте. Арретир предназначен для закрепления внутренней и наружной рамок гироскопа в нерабочем положении. Он служит также для установки на курсояой шкале нужного отсчета. При этом рукояткой 7 арретира поворачивается наружная рамка вместе с внутренней рамкой и ротором до тех пор, пока в смотровом окне под чертой указателя не появится нужное деление шкалы. Порядок включения и выключения гирополукомпаса. Включать и выключать гирополукомпас можно только в неподвижной машине. Перед включением гирополукомпаса необходимо убедиться, что рукоятка 7 арретира находится в положении “от себя”, т. е. прибор застопорен, а напряжение бортовой сети машины равно не менее 24 В. Затем выключатель питания гироскопа ставят в положение ВКЛЮЧЕНО. Через 5 мин плавным поворотом рукоятки арретира при ее положении “от себя” на курсовой шкале гирополукомпаса устанавливается необходимый отсчет направления движения. После этого гирополукомпас разарретируется, т. е. рукоятку арретира оттягивают на себя до щелчка. Если позволяет обстановка, начинать движение следует спустя 10— 20 мин. В таком случае вращение ротора и рамок стабилизируется и гирополукомпас обеспечивает высокую точность выдерживания направления движения. Во время движения вращать рукоятку арретира, когда прибор снят со стопора, не рекомендуется, так как это может вызвать срыв шкалы. При выключении гирополукомпаса рукоятка арретира ставится в положение “от себя” и выключается питание прибора. Ориентирование с помощью гирополукомпаса включает подготовку исходных данных для движения, ориентирование машины на начальной точке маршрута и непосредственное выдерживание направления движения. Подготовка исходных данных. Исходными данными служат магнитные азимуты или дирекционные углы направлений между точками поворота на маршруте и расстояния между этими точками. Такие данные определяются по топографической карте. Маршрут движения намечается по проходимой местности с использованием ее маскировочных и защитных свойств. Выбранные ориентиры (точки) на поворотах маршрута обводятся кружками. Расстояния между точками поворота могут быть 6—10 км при движении днем и 3—5 км при движении ночью. Вариант оформления маршрута на карте показан на рис. 82. При отсутствии карты экипаж готовит (или получает) схему маршрута, на которую кроме исходных данных наносят промежуточные ориентиры, а также показывают возможные препятствия для движения. 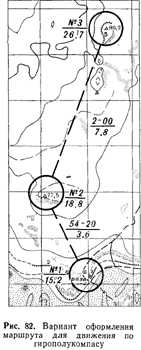 Ориентирование машины на исходной точке маршрута включает определение магнитного азимута (дирекционного угла) направления продольной оси машины и установку этого угла на курсовой шкале гирополукомпаса. Первоначальное ориентирование может выполняться по магнитному азимуту, линейному ориентиру или направлению на удаленный ориентир и по Полярной звезде. По магнитному азимуту машину ориентируют, когда с исходной точки не видно ориентиров. На расстоянии 40—50 м от машины определяют компасом поочередно магнитные азимуты направлений вдоль ее бортов (рис. 83). За окончательную величину принимают среднее значение из двух измерений. Полученный магнитный азимут продольной оси машины устанавливают на курсовой шкале прибора при включенном гирополукомпасе. После этого машину медленно поворачивают так, чтобы указатель отсчета встал на шкале пробив значения азимута направления движения на первом звене маршрута. 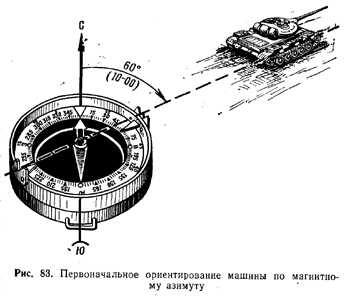 По линейному ориентиру. На исходной точке машину устанавливают вдоль линейного ориентира. Для этого на угломерном устройстве ставят отсчет 0-00 (или 30-00), затем машину медленно продвигают вперед с одновременным поворотом в нужную сторону до тех пор, пока центральная марка прицела (перекрестие) не будет направлена точно вдоль линейного ориентира. При таком положении машины на шкале гирополукомпаса устанавливают заранее определенный по карте дирекционный угол или азимут направления линейного ориентира. После этого машина медленно разворачивается до тех пор, пока указатель отсчета не станет против значения магнитного азимута (дирекционного угла) направления движения. По направлению на ориентир машину ориентируют так же, как и по линейному ориентиру. При отсчете на башенном угломере 0-00 (или 30-00) постепенным передвижением машины центральную марку прицела (или перекрестие визирного устройства) совмещают с направлением на ориентир. Затем на курсовой шкале гирополукомпаса устанавливают значение заранее определенного по карте магнитного азимута или дирекционного угла на этот ориентир. По Полярной звезде машину зриентируют так же, как и по направлению на ориентир. Для этого замечают или выставляют искусственный ориентир в направлении проектирования Полярной звезды на линию горизонта. При отсчете башенного угломера 0-00 (или 30-00) добиваются совмещения центральной марки прицела (или перекрестиявизирного устройства) с направлением на ориентир. На курсовой шкале гирополукомпаса устанавливают отсчет, равный нулю, затем машину медленно поворачивают до тех пор, пока на курсовой шкале не установится отсчет, равный дирекционному углу направления движения. Точность первоначального ориентирования машины по компасу и Полярной звезде при тщательном выполнении приемов составляет около 3°. При определении магнитных азимутов (дирекционных углов) по карте и ориентировании машины по линейному ориентиру и направлению на ориентир точность около 1°. При значительном протяжении маршрута рекомендуется через каждые 1—2 ч движения уточнять курс, т. е. переориентировать машину одним из изложенных выше способов. Выдерживание направления движения с помощью гирополукомпаса аналогично движению по азимуту: машина движется по прямым линиям от ориентира к ориентиру, при этом надо стремиться вести машину так, чтобы на протяжении всего участка маршрута от исходной точки до точки поворота отсчет на курсовой шкале сохранялся неизменным. Пройденное расстояние между точками определяется по спидометру. При движении вне дорог часто приходится объезжать воронки, ямы и другие небольшие по размеру препятствия. Чтобы не отклониться от намеченного маршрута, объезд таких препятствий выполняется поочередно справа и слева. Таким образом, путь движения до очередной точки поворота будет представлять волнистую линию. Пройдя намеченное расстояние, находят ориентир (точку поворота), на котором машину поворачивают до тех пор, пока на курсовой шкале не установится отсчет, равный величине магнитного азимута или дирекционного угла направления на следующую точку поворота. Большие препятствия объезжают, как показано на рис. 25. Перед началом объезда на курсовой шкале устанавливают нулевой отсчет. Машину поворачивают до' тех пор, пока на курсовой шкале не установится отсчет, равный 15-00 (90°). После этого записывают отсчет по спидометру и начинают движение. Таким же порядком выполняют повороты и на последующих точках. При выходе машины на линию первоначального направления движения ее поворачивают до установки на курсовой шкале отсчета, равного нулю. Расстояние при дальнейшем движении считывают по спидометру с учетом пройденного при объезде. Точность выдерживания маршрута. Величина ошибки в выдерживании направления движения зависит от погрешностей в определении по карте исходных данных, первоначальном ориентировании машины, определении расстояний по спидометру и ухода главной оси гироскопа от первоначально заданного положения. Средняя ошибка придвижении в одном направлении не превышает, как правило, 2% пройденного расстояния. Если маршрут движения имеет несколько точек поворота, величина ошибки обычно составляет около 5% пройденного расстояния. 6.2. Ориентирование на местности с помощью координатора Устройство навигационной аппаратуры с координатором. В комплект навигационной аппаратуры входят: датчик пути, датчик курса, пульт управления и координатор. Эти приборы являются основными. Датчик пути представляет собой электромеханический прибор, соединенный с ходовой частью машины гибким валиком. Энергия механического вращения валика при движении машины превращается в электрические сигналы, которые поступают в координатор. Таким образом датчик пути непрерывно определяет величину пройденного расстояния и передает ее в координатор. Датчик курса—гироскопический курсоуказатель, чувствительным элементом которого служит трехстепенной гироскоп. Датчик обеспечивает непрерывное определение и передачу в координатор значения дирекционного угла направления движения машины. Пульт управления служит для включения и выключения аппаратуры и широтной балансировки гироскопа. Координатор—прибор наземной навигации. Его основу составляет счетно-решающее устройство, которое по данным, поступающим от датчиков пути и курса, непрерывно вырабатывает прямоугольные координаты местоположения движущейся машины, курс движения, дирекционный угол направления на конечный пункт маршрута и расстояние до него по приращениям (разностям) координат. Это позволяет точно выдержать направление движения и прибыть в указанный пункт, не пользуясь топографической картой даже в сложных и трудных условиях ориентирования. Достаточно лишь в исходном пункте правильно определить и установить на шкалах координатора необходимые исходные данные. Координатор имеет ряд устройств и шкал, с помощью которых вводятся и считываются прямоугольные координаты, приращения координат, дирекционные углы и величина корректуры пути. Все эти устройства и шкалы размещены на лицевой панели прибора (рис. 84).  Шкальные механизмы координатора представляют собой счетчики 7 координат барабанного типа. Они позволяют вводить и считывать координаты, выраженные пятизначными числами. Цена одного деления правого барабана в режиме РАБОТА составляет 10 м. При контроле работы аппаратуры переключатель масштабов устанавливается в положение 1 м, в этом случае цена одного деления правого барабана составляет 1 м. При установке переключателя масштабов в положение 1 м на шкалах х и у устанавливаются сокращенные координаты: десятки и единицы километров, а также сотни, десятки и единицы метров, например, х= 54 347 y=47432. Особенность ввода координат х и у при установке переключателя масштабов в положение 10 м заключается в дополнении сокращенных координат слева цифрой, соответствующей сотням километров, и округлении единиц метров до десятков. Если, например, полные прямоугольные координаты исходной точки x=1854347 и y=6847432, то на шкалах координатора соответственно устанавливаются значения x=85435 и y=84743. Шкальные механизмы приращений координат предcnавляют собой неподвижные шкалы 6 с ценой деления 10 км и боковые барабаны с ценой деления 200 м. Установка разностей координат выполняется с учетом их знака. Дирекционный угол продольной оси машины (курсовой угол) устанавливается и считывается с курсовых шкал грубого отсчета (ГО) 9 и точного отсчета (ТО) 10. Цена деления шкалы грубого отсчета равна 0-50, а шкалы точного отсчета 0-01. Шкала грубого отсчета используется также для установки и считывания с помощью указателя (черной зашрифовки) дирекционного угла направления на конечный пункт маршрута. Шкала 11 КОРРЕКТУРА ПУТИ имеет 46 делений с оцифровкой от—13% до +10%. Цена одного деления составляет 0,5%. В комплекте аппаратуры имеется специальный прибор—указатель курса, который устанавливается на приборном щитке перед механиком-водителем и дублирует показания шкалы грубого отсчета дирекционного угла при движении машины по заданному курсу. Включение и выключение координатора производится только в неподвижной машине и, как правило, при работающем двигателе. Перед включением необходимо проверить напряжение в бортовой сети машины, оно должно быть не менее 24 В. Убедившись в этом, тумблер СИСТЕМА перевести в положение ВКЛ., при этом возникает характерный звук работающего преобразователя тока и загораются лампочки подсветки шкал координатора. Спустя 13 мин после включения на шкалах координатора устанавливают исходные данные: координаты начальной точки, приращения координат, дирекционный угол продольной оси машины и величину корректуры пути. При выключении координатора останавливают машину, после этого тумблер СИСТЕМА переводят в положение ОТКЛ. Начинать движение можно лишь спустя 20 мин после того, как перестанет вращаться по инерции ротор гироскопа. Если остановить машину нельзя, координатор не выключают до появления возможности сделать остановку. Не рекомендуется также отключать электропитание аппаратуры при включенном координаторе. Подготовка исходных данных для движения. Исходными данными для ориентирования с помощью координатора служат полные прямоугольные координаты исходного пункта (хисх, Уисх), пункта назначения (Хп.п, Уп.н), разности координат между пунктом назначения и исходным пунктом (Ах, Ду), дирекциогный угол продольной оси машины на исходном пунктз (аисх), дирек-ционный угол направления с исходного пункта на пункт назначения (ап.н) и величина корректуры пути. От точности определения исходных данных во многом зависит правильность показаний координатора. Маршрут движения намечается по карте с учетом проходимости местности. В качестве исходных пунктов выбирают хорошо видимые на местности и нанесенные на карту четко выраженные контурные точки, на которые можно наехать или подъехать вплотную при первоначальном ориентировании машины. Координаты исходного пункта, точек поворота на маршруте движения и пункта назначения определяют заранее по карте с возможно высокой точностью, например с использованием поперечного масштаба. Также заранее определяют величину корректуры пути контрольным проездом измеренного по карте прямолинейного участка маршрута на местности, характерной для района предстоящих действий. Величину отсчета, которую необходимо установить на шкале КОРРЕКТУРА ПУТИ, рассчитывают по формуле K=(x-s)*100% / s При движении на равнинной местности по грунтовым дорогам или по снежной целине глубиной 15— 20 см величина корректуры пути обычно не превышает для гусеничных машин 3%, для колесных машин 5%. При действиях на холмистой и в горной местности величина корректуры пути возрастает на 2—5%. Дирекционный угол продольной оси машины на исходном пункте часто определяется с помощью артиллерийской буссоли, особенно при ограниченной видимости и на местности, бедной ориентирами. Перископическая артиллерийская буссоль ПАБ-2 (рис. 85) служит для определения азимутa и измерения горизонтальных и вертикальных углов. Она состоит из оптического и угломерного устройств коробки с магнитной стрелкой, отсчетного червяка с буссольным и угломерным барабанами, уровня, буссольного и угломерного колец со шкалами, разделенными на 60 делений. Цена одного деления шкалы 1-00. Четные деления оцифрованы. На буссольной шкале оцифровка делений возрастает по ходу часовой стрелки (цифры и штрихи имеют черный цвет), а на угломерной шкале—в обратном направлении (цифры и штрихи имеют красный цвет). Деления на шкалах отсчитываются против указателей. На буссольной шкале указатель отмечен буквой Б, а на угломерной—буквой У. На отсчетном червяке буссоли укреплены буссольный и угломерный барабаны. Цвет оцифровок шкал на барабанах согласуется с цветом соответствующих оцифровок шкал на кольцах буссоли. Цена одного деления шкал на барабанах 0-01. В корпусе отсчетного червяка крепится круглый уровень, с помощью которого буссоль устанавливается в горизонтальной плоскости. Магнитный азимут продольной оси машины определяют в таком порядке (рис. 86): на расстоянии 50—60 м от машины устанавливают буссоль и горизонтируют ее; поворотом буссоли вокруг вертикальной оси совмещают концы магнитной стрелки с установочными рисками; при этом отсчеты на шкалах буссольного кольца и буссольного барабана должны быть равны 0; перекрестие монокуляра буссоли наводят на оптический визир машины; одновременно с этим перекрестие оптического визира машины наводят на центр буссоли; считывают со шкал буссоли значение магнитного азимута направления на оптический визир машины, а со шкалы угломерного устройства машины значение горизонтального угла между продольной осью машины и направлением на буссоль. Величину дирекционного угла направления продольной оси машины вычисляют по формуле а=Ам+(± ПН)+(± 30-00)— , где —величина угла между продольной осью машины и направлением на буссоль; ПН —поправка направления (берется по карте). 30-00 вводится в формулу со знаком “плюс”, если Aм меньше 30-00, и со знаком “минус”, если больше 30-00. Пример. При совмещении перекрестия монокуляра буссоли с оптическим визиром машины на буссольном кольце и барабане установился отсчет 7-11. Горизонтальный угол визирования на буссоль равен 9-02, а поправка направления +1-07. Подставив эти значения в формулу, получим величину дирекционного угла а = 7-11 + (+ 1 -07) + 30-00 — 9-02 = 29-16. Определение дирекционного угла продольной оси машины на исходном пункте является первоначальным ориентированием машины, которое может быть выполнено и по карте. Первоначальное ориентирование машины по карте. На исходном пункте машину устанавливают примерно в направлении удаленного местного предмета, точно опознанного на карте и на местности. На рис. 87 таким предметом служит башня. По карте с помощью хордо-угломера и циркуля измеряют дирекционный угол направления с исходного пункта на башню. Для этого через центры условных знаков исходного пункта (развилка дорог) и башни проводят прямую до пересечения с ближайшей вертикальной линией координатной сетки. Затем устанавливают по хордоугломеру раствор циркуля-измерителя, равный 10-00, из точки пересечения вертикальной линии с проведенной прямой (точки А) откладывают этот отрезок на линиях и получают точку Ci на вертикальной линии координатной сетки и Cg—на линии от исходного пункта на башню. После этого раствор циркуля, равный расстоянию CiC2, прикладывают к хордоугломеру и передвигают левую иглу циркуля по крайней левой линии хордоугломера до тех пор, пока правая игла не совпадет с каким-либо пересечением горизонтальной и наклонной линий. На рис. 87 отсчет по хордоугломеру равен 3-68. Это и есть величина дирекционного угла направления с исходной точки на башню. Так как машину установить точно в направлении выбранного местного предмета не всегда легко, то с помощью башенного угломера измеряют угол между направлением продольной оси машины и направлением на башню, т. е. угол визирования. На рис. 87 видно, что дирекционный угол продольной оси машины равен сумме дирекционного угла направления на башню, определенного по карте, и угла визирования: 3-68+4-12=7-80. Если угол визирования будет слева от направления на местный предмет (ориентир), его величина вычитается из дирекционного угла, определенного по карте. По хордоугломеру можно измерять углы величиной до 90°. Если угол больше 90° (15-00), измеряют дополнение к нему, а затем вычисляют дирекционный угол. Точность измерения угла хордоугломером составляет 0-02. Ввод исходных данных в координатор осуществляют после первоначального ориентирования машины в такой последовательности (см. рис. 84): — тумблер МАСШТАБ ставят в положение 10 м; — тумблер КОНТРОЛЬ—РАБОТА ставят в положение РАБОТА; — поворотом рукоятки КОРРЕКТУРА ПУТИ устанавливают на шкале значение корректуры пути. Вращать рукоятку можно как по ходу, так и против хода часовой стрелки, а вводить значение корректуры пути можно как на стоянке, так и в движении; — тумблер СИСТЕМА ставят в положение ВКЛ.; — через 10—13 мин после включения координатора устанавливают координаты исходного пункта Хисх и Уисх. Установку координат выполняют с помощью рычажков 1, 2, 3 и рукоятки 5. Значение координаты х устанавливают поразрядно слева направо путем последовательного перевода рычажков /, 2 и 3 в верхнее положение и одновременного вращения рукоятки 5 по ходу или против хода часовой стрелки. Координагу у устанавливают так же, как и координату х, только рычажки /, 2, 3 переводят в нижнее положение; — устанавливают приращения (разности) координат Ах и Ау с учетом их знаков с помощью рычажка 4 и рукоятки 5. При установке Ах рычажок переводится в верхнее положение, а при установке Ay—в нижнее. При этом индекс указателя курса на конечный пункт автоматически устанавливается против соответствующего отсчета шкалы КУРС; — значение дирекционного угла продольной оси машины (курса) на шкалах грубого и точчого отсчетов устанавливают вращением рукоятки УСТАНОВКА КУРСА по ходу или против хода часовой стрелки. Установку курса целесообразно выполнять непосредственно перед началом движения. В таком случае уход главной оси гироскопа во время стоянки машины не окажет влияния на точность работы координатора; — на курсоуказателе поворотом подвижного индекса устанавливают значение дирекционного угла курса с начального пункта на конечный пункт маршрута. На этом заканчивается ввод исходных данных в координатор. Ориентирование на марше с помощью координатора. В начале движения необходимо убедиться в правильности работы аппаратуры. Для этого на первой контрольной точке сравнивают координаты, снятые со шкал координатора, с координатами, заранее определенными и подписанными на карте. Расхождения в координатах не должны превышать 1 мм в масштабе карты. Если это условие выполняется, продолжают движение по маршруту. Для того чтобы определить свое местоположение на маршруте в любой момент времени, достаточно по координатам на шкалах координатора нанести точку на карту, а по значению дирекционного угла определить направление движения. При движении с большой скоростью часто выполняют общую ориентировку, при этом по координатам на шкалах координатора определяют только квадрат сетки карты, в котором находится машина. По мере удаления от исходного пункта в показаниях счетчиков координат накапливаются ошибки в основном из-за отклонения главной оси гироскопа от первоначального положения. Величина такого отклонения за один час работы прибора обычно не превышает 0-30, что может вызвать ошибку в координатах около 0,5 км на 25—30 км пути. На величину ошибки оказывают влияние и неточности, допущенные при подготовке исходных данных. Поэтому в пути периодически проверяют правильность работы навигационной аппаратуры. На контрольных точках сличают координаты, считанные со шкал координатора и определенные по карте. Если расхождение между координатами более 1 мм в масштабе карты, в показания координатора вводят поправки, т.е. уточняют ориентировку. Величина отклонения по азимуту в основном зависит точности определения и ввода дирекционного угла продольной оси машины при первоначальном ее ориентировании и от ошибок, допущенных при широтной балансировке гироскопа. На отклонение по дальности в основном влияют ошибки в определении корректуры пути. Пусть, например, машина вышла к ор. 2—развилке дорог (рис. 88). На карте пройденное расстояние составляет 80 мм. По координатам, снятым го шкал координатора, местоположение ориентира на карте не совпадает с действительным его местоположением на местности. Линейное отклонение по азимуту (Ad) составило 3 мм, а по дальности (Л5) 4 мм в масштабе карты. Поправка в дирекционный угол в делениях угломера определяется по формуле = d*1000 / S, где S - расстояние на карте от исходной до контрольной точки в мм; d—линейное отклонение точки от контрольного ориентира по азимуту в мм. В нашем примере (S=80 mm, Ad=3 мм) поправка в дирекционный угол =3*1000 / 80=0-38 В этом случае вращением рукоятки установки курса на шкале точного отсчета надо измените отсчет на 0-38. Если точка отклонилась влево по ходу движения, отсчет на шкале надо увеличить, а вправо—уменьшить. Величина поправки в корректуру пути определяется по формуле К=S*100% / S, где S — отклонение точки на карте ог контрольногоориентира по дальности в мм. В нашем примере поправка в корректуру пути К=4*100 / 8= 5% . Рукояткой корректуры пути изменяют отсчет шкалы КОРРЕКТУРА ПУТИ на величину поправки, знак которой определяется положением точки м1 или м2 (рис. 88), нанесенной на карту относительно контрольного ориентира (точки М) (рис. 89).После введения поправок в курс и корректуру пути на шкалах координатора устанавливают координаты контрольной точки, определенные по карте, и продолжают движение. Во время длительных остановок записывают отсчет шкалы КУРС, а при возобновлении движения вновь устанавливают его значение. Это исключает ошибки в координатах за счет ухода оси гироскопа. Координатор позволяет определять координаты и курс машины только в пределах одной координатной зоны, поэтому на маршруте, пересекающем стык смежных зон, использование координатора усложняется. В этом случае координаты конечного пункта определяют по координатной сетке, построенной по выходам линий сетки смежной зоны. Если конечный пункт маршрута, расположен на большом удалении от меридиана, разделяющего соседние зоны, то после его пересечения машину переориентируют на одном из контрольных пунктов. Переориентирование машины заключается в определении и установке на шкалах грубого и точного отсчетов нового дирекционного угла продольной оси машины или введении в прежний курс поправки за переход из одной координатной зоны в другую. Одновременно с этим на соответствующих счетчиках и шкалах устанавливают координаты местоположения машины и разности координат между конечным и контрольным пунктами в системе координат рабочей зоны. Поправку определяют обычно в районах магнитных аномалий, когда буссолью пользоваться нельзя, а ориентиров, по которым можно было бы измерить на карте курсовой угол, не видно. Поправка определяется по карте. Она равна углу между вертикальными линиями координатных сеток двух смежных зон. Целеуказание с помощью координатора. В ряде случаев, особенно в разведке, координатор может быть использован и для целеуказания. Например, двигаясь по маршруту, машина достигла района в квадрате 3098 (рис. 90). Слева по ходу движения на удалении 2,9 км обнаружена цель, угол визирования на цель по угломерному устройству равен 11-08. По координатам, снятым со шкал координатора, определяют местоположение машины на карте, а затем по углу визирования и дальности—местоположение цели. Имея такие данные, при необходимости местоположение обнаруженной цели можно передать по средствам связи. В некоторых случаях при целеуказании с помощью координатора достаточно передать координаты и курсовой угол машины, дирекционный угол направления на цель и расстояние до нее. Получив такие данные, принимающий целеуказание легко может нанести цель на свою карту.  Нанесение на карту не обозначенных на ней объектов с помощью координатора. Чтобы нанести на карту объект, например колонный путь, надо проехать по нему с включенным координатором. Делая короткие остановки на характерных точках поворотов колонного пути, наносят их на карту по координатам, снятым со шкал координатора. Получив такие точки на карте, достаточно соединить их линией, которая укажет направление колонного пути. |