Евгений Дипломная работа (2). 1 Утверждена приказом по университету от
 Скачать 2.32 Mb. Скачать 2.32 Mb.
|

Принцип действия роторных управляемых системВ настоящее время для проходки вертикальных, наклонных и горизонтальных стволов активно применяются rotary steerable system (RSS) роторные управляемые системы (РУС), в которых разрушение горной породы осуществляется вращением долота с бурильной колонной верхним приводом буровой установки или ротором, а также отклоняющие системы, сочетающие применение винтовых забойных гидродвигателей и РУС. Данные системы являются наиболее совершенными, а в сочетании с системами телеметрии и геонавигации превратились в совершенные беспилотные средства дистанционного управления направлением буримых скважин. Возможности этих систем впечатляют: при высочайших точности (± 0,1º) и оперативности данные системы способны осуществлять бурение скважин любой ориентации в пространстве протяженностью до 13 км непрерывными рейсами, протяженность которых может составлять более 1000 м. На рисунке 3.2 представлена блок-схема управления отклоняющей системой типа РУС. Обладая автономным источником электрической энергии 4 подобные отклоняющие системы управляются с поверхности оператором через компьютер 10, который формирует сигнал, передаваемый через буровой раствор или посредством электромагнитного излучения 8 до забойной компоновки, в которой посредством электронного блока 3 и системы привода 2 отклоняющего механизма 1, производится ориентированное в заданном направлении изменение направления скважины. В то же время встроенная система телеметрии 5 ведет постоянный мониторинг угловых параметров бурящейся скважины и посредством электронного блока 6, и системы преобразования сигнала 7 передает информацию на поверхность в блок приемки и усиления сигнала 9, далее в компьютер 10 и на прибор для визуального контроля процесса бурения на буровой 11 к оператору. 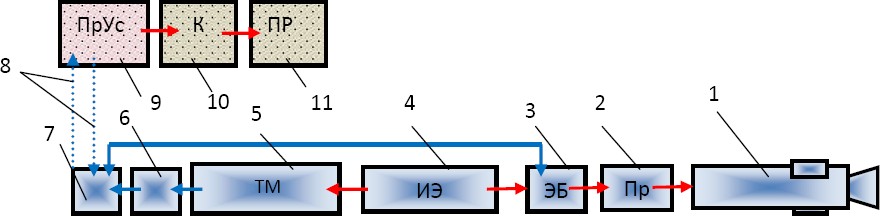 Рисунок 3.2 – Блок-схема управления отклоняющей системой типа РУС: 1 – механизм искривления; 2 – привод механизма искривления; 3 – электроный блок управления приводом механизма искривления; – источник электроэнергии (гидротубина или аккумуляторные батареи); – телеметрия; 6 – электронный блок телеметрии; 7 – блок передачи и приема информации, передавамой с поверхности и к забойной системе; 8 – канал связи (гидроимпульсный, электромагнитный); 9 – приемное устройство и усилитель сигнала; 10 – компьютер; 11 – прибор для визуального контроля процесса Системы РУС позволяют бурить пологие и горизонтальные скважины с плавным профилем из-за отсутствия перегибов ствола (обычных при использовании забойных двигателей) с большей протяженностью за счет снижения сил трения и лучшей очисткой ствола от шлама. Более высокая проходка с постоянным вращением бурильной колонны предотвращает вероятность прихватов бурильного инструмента, сокращает время на очистку ствола от выбуренной породы и дает ряд дополнительных преимуществ по качеству вскрытия продуктивного горизонта. Применение РУС позволяет бурить протяженные – более 10 км горизонтальные стволы, так как бурение с вращением бурильной колонны снижает вероятность зашламования колонны и обеспечивает более высокую способность к проталкиванию колонны по горизонтальному стволу. Исходя из классификации рассмотренной ранее различают два основных типа РУС: реализующие механизм фрезерования стенки (push the bit); реализующие механизм ассиметричного разрушения забоя вследствие перекоса долота (point the bit). Система «Push the bit» – предполагает набор кривизны фрезерованием стенки скважины под действием отклоняющего усилия. В системе с отклонением долота отклоняющая сила на долоте появляется в результате выдвижения лопаток, осуществляющих давление на стенку скважины. На рисунке 3.3 представлена схема роторной управляемой системы с отклонением долота. 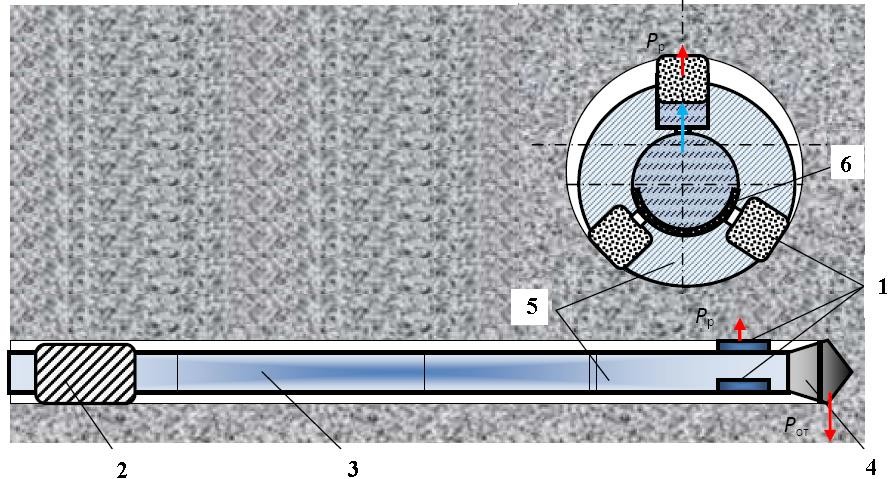 Рисунок 3.3 – Схема роторной управляемой системы с отклонением долота: 1 – выдвижные лопатки; 2 – стабилизатор; 3 – блок управления; 4 – долото; 5 – блок отклонения; 6 – заслонка Привод лопаток 1 гидравлический, осуществляемый за счет последовательной подачи бурового раствора в соответствующие гидрокамеры. Для увеличения угла отклонения каждая лопатка 1, проворачиваясь и находясь в нижней части ствола, нажимает на нижнюю сторону ствола, а для уменьшения угла каждая лопатка 1 нажимает на верхнюю часть ствола. Команды, направляемые при помощи телеметрии по гидроимпульсному и электромагнитному каналам связи, определяют время и силу срабатывания лопаток 1. Блок управления 3, расположенный над блоком отклонения 5, приводит в действие поворотную заслонку 6, которая закрывает или открывает канал для подачи бурового раствора в камеры с лопатками 1 в соответствии с поворотом бурильной колонны. Система синхронно изменяет интервал воздействия и усилие, с которым лопатка 1 воздействует на стенку скважины, тем самым направляя долото 4 в требуемом направлении. Долото 4 обеспечивает отклонение ствола фрезерованием стенки скважины боковым вооружением. Таким образом, значительная роль в процессе искривления данным типом РУС отводится долоту, которое должно отвечать определенным требованиям [10]. В РУС реализующих механизм перекоса долота – (point the bit) используют внутренний изгиб вала отклонителя для изменения направления скважины. В такой системе точка изгиба вала находится внутри корпуса над долотом. Ориентация изгиба вала контролируется с помощью серводвигателя, который вращается с той же скоростью, что бурильная колонна, но в обратном направлении. Это позволяет сохранить геостационарную ориентацию торца бурового инструмента при вращении колонны. В системе РУС с изменением направления перекоса или позиционирования долота (point the bit) используются механизм управления с эксцентриковой втулкой. Схема работы устройства данного типа показана на рисунке 3.4. РУС фиксируется в скважине при выдвижении плашек 4. Проворот эксцентриковой втулки 1 осуществляется с помощью сервомеханизма, работа которого управляется электронным блоком по команде от управляющего процессом компьютера. Поворот эксцентриковой втулки 1 приводит к отклонению оси вала-ротора 3 от центральной оси корпуса 2 РУС и долото 5 получает перекос в ту или иную сторону, в зависимости от положения втулки 1 внутри корпуса-статора 2 РУС. На рисунке 3.4, а, дана схема соответствующая случаю бурения без искривления, при котором внутреннее отверстие эксцентриковой втулки 1, вал 3 соосны корпусу 2 РУС, а долото 5 не имеет перекоса. В иных случаях, проиллюстрированных на рисунке 3.4, б, в, эксцентриковая втулка 1, проворачиваясь, занимает такую позицию в корпусе РУС, которая обеспечивает изгиб вала 3, перекос долота 5, изменение 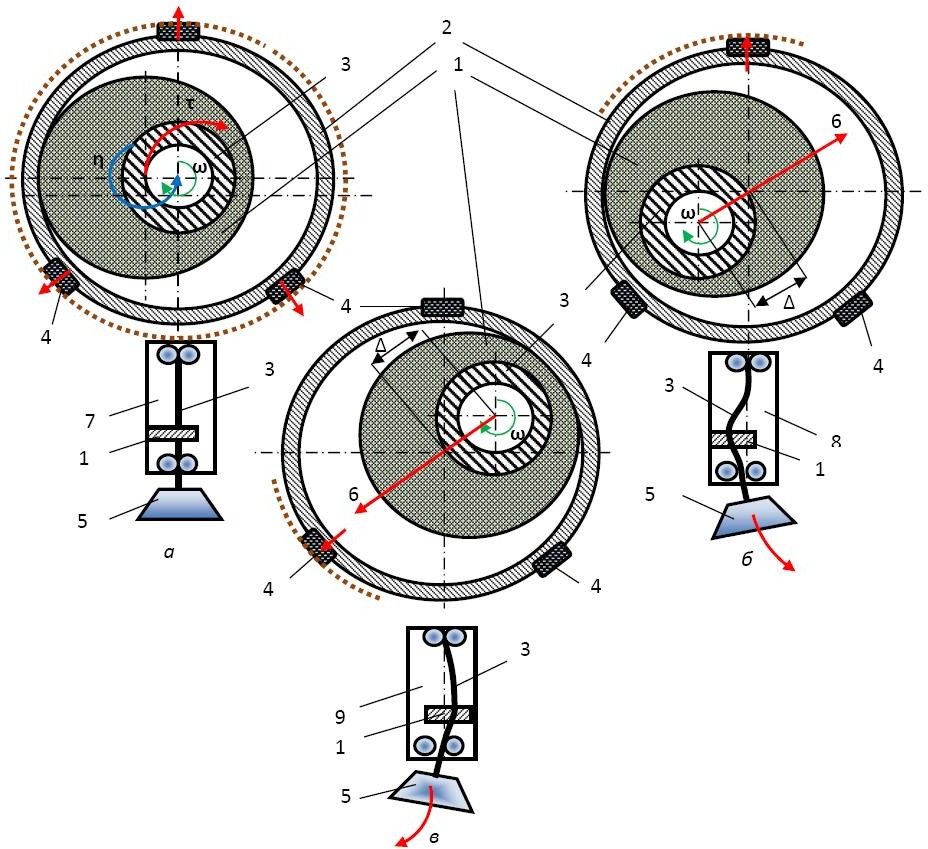 направления бурения и искривление скважины в направлениях, указанных на схемах (позиция 6). направления бурения и искривление скважины в направлениях, указанных на схемах (позиция 6).Рисунок 3.4 – Схемы работы РУС с позиционированием долота: a – положение системы, определяющей прямолинейное направление бурения; б, в – положения системы, определяющей изменение направления бурения; 1 – эксцентриковая втулка; 2 – корпус-статор; 3 – вал-ротор; 4 – выдвижные плашки; 5 – долото; 6 – направление искривления скважины; 7 – схема РУС при прямолинейном бурении; 8, 9 – схемы при изменении |