Лабораторная работа № 2. 2. Подготовка к работе
 Скачать 155.71 Kb. Скачать 155.71 Kb.
|

|
1.Цель работы Изучение основных эксплуатационных характеристик двигателя посто-янного тока (ДПТ) параллельного возбуждения, способов пуска и регулиро-вания частоты вращения.Получить навыки управления ДПТ. 2.Подготовка к работе 2.1 Ознакомиться с устройством, принципом действия, схемой и ос-новными характеристиками ДПТ параллельного возбуждения [1, 2.2, 2.3, 2.4, 2.9 -2.11]. 2.2 Начертить схему ДПТ параллельного возбуждения с пусковым и ре-гулировочными реостатами, а также с приборами для измерения напряжения, токов якоря и возбуждения. 2.3 Записать формулы для расчета: -номинального момента МНОМДПТ ; -электромагнитного момента; -ЭДС якоря; -тока якоря при пуске и в номинальном режиме работы двигателя; -электрической мощности Р1двигателя; -КПД двигателя. 2.4 По паспортным данным ДПТ рассчитать его номинальный момент (см. п. 4.1 методических указаний). 2.5 Изобразить качественно естественную и искусственные механические характеристики ДПТ при полюсном, реостатном и якорном регулировании частоты вращения якоря. 2.6 Заготовить таблицы для записи результатов измерений, снабдив их заголовками, характеризующими опыт. 3.Рабочее задание 3.1 Собрать электрическую цепь двигателя параллельного возбужде-ния. Произвести “ручной” пуск и остановку двигателя без нагрузки с помощью пускового реостата. Записать бросок пускового тока (п. 4.2, 4.3 методических указаний). На лабораторном стенде установлен ДПТ серии 4П, имеющий следующие номинальные данные: - мощность РНОМ=1кВт; - напряжение UНОМ=220В; - ток якоря IЯНОМ=6.5А; - частота вращения nНОМ=3150 об/мин; - коэффициент полезного действия НОМ=74% 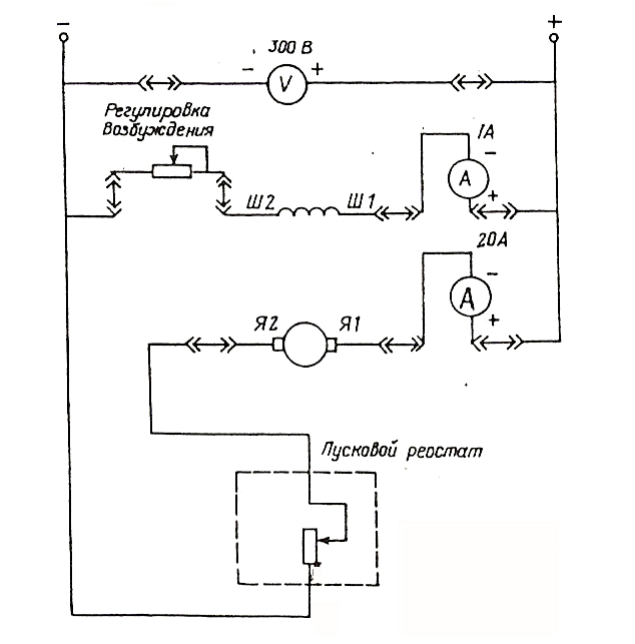 Рисунок 1.Схема установки.  9,55 9,55 Н*м Н*мСобрать электрическую цепь двигателя параллельного возбуждения. Произвести “ручной” пуск и остановку двигателя без нагрузки с помощью пускового реостата. Записать бросок пускового тока (п. 4.2, 4.3 методических указаний). Пусковой ток 10А. 3.2 Снять участок естественной механической характеристики n(М) двигателя, фиксируя при этом значения напряжения U, токов якоря IЯи возбуждения IВ. Момент уменьшать от 0,8МНОМ(4-5 точек) до нуля (холостой ход). Построить механическую характеристику двигателя, а также зависимость его КПД от мощности нагрузки Р2.
 Рисунок 2. Механическая характеристика ДПТ параллельного возбуждения. Рассчитаем значения ЭДС для нахождения КПД. Воспользуемся следующими формулами.   
 Рисунок 3. Зависимость КПД от мощности нагрузки 3.3 Снять и построить искусственную механическую характеристику при пониженном токе возбуждения IВ= 0,7 IВНОМ, фиксируя при этом значение тока якоря (п. 4.5 методических указаний).
 Рисунок 4. Искусственная механическая характеристика 3.4 Осуществить полюсное регулирование частоты вращения якоря без нагрузки (МС=0). При этом частота вращения не должна превышать значения 3500 об/мин. Снять и построить зависимость n(IВ). Обратить внимание на резкое возрастание частоты вращения n и тока якоря IЯ при уменьшении тока возбуждения IВ двигателя.
 Рисунок 5. Зависимость частоты оборотов от тока возбуждения 3.5 Осуществить якорное регулирование частоты вращения при IВ=IВНОМ=const. Снять и построить искусственную механическую характеристику ДПТ при U=180В (п. 4.6 методических указаний).
 Рисунок 6. Искусственная механическая характеристика при якорном регулировании. Вывод. Реальные характеристики отличаются от теоретических вследствие погрешности измерении. В ходе проведенных опытов было выяснено, что якорное регулирование позволяет получить более плавное изменение частоты оборотов двигателя. |