Овчинников_АВ_ЭЭТбд-1901в_Задание_3. 2 Принципы управления электроприводами
 Скачать 265.36 Kb. Скачать 265.36 Kb.
|

|
М  ИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ ИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИфедеральное государственное бюджетное образовательное учреждение высшего образования «Тольяттинский государственный университет» Институт химии и энергетики (наименование института полностью) Кафедра "Электроснабжение и электротехника" (наименование кафедры/департамента/центра полностью) 13.03.02 Электроэнергетика и электротехника (код и наименование направления подготовки, специальности) Электроснабжение (направленность (профиль) / специализация) Задание 3 по учебному курсу «Электрические машины и основы электропривода» (наименование учебного курса) Вариант 4
Тольятти 2022 Практическое задание 3 Тема 2.2. Принципы управления электроприводами Задание: произвести исследование замкнутой системы электропривода в следующей последовательности: - собрать модель системы электропривода и задать ее параметры; - снять механические характеристики замкнутой и разомкнутой систем электропривода; - построить механические характеристики и сделать выводы по проделанной работе. Таблица 1 Варианты задания (технические параметры машин постоянного тока с независимым возбуждением)
Решение: Составим схему модели согласно рисунку 1 и зададим ее параметры. 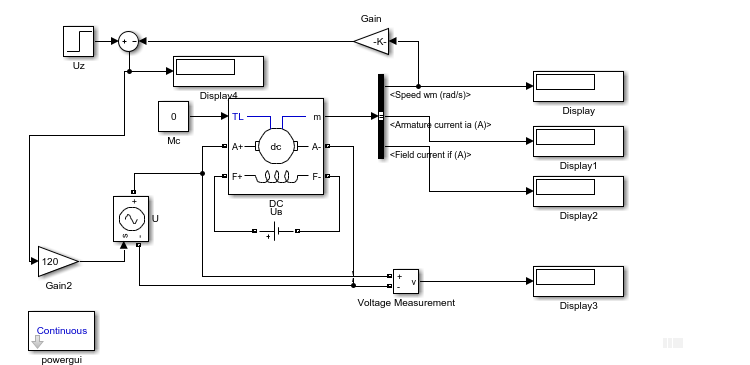 Рисунок 1 - Модель для исследования замкнутой системы электропривода Параметры машины DC Machine заносим в соответствии с таблицей 1. Определяем коэффициент отрицательной обратной связи по скорости,  : : Определяем напряжение управления ∆U на входе усилителя в разомкнутой иUзс в замкнутой системах, В:   Устанавливаем значение 120 коэффициента усиления. Открываем окно блока Step и в его полях устанавливаем: Step time-0; Final value – Uзс. В окне блока Gain устанавливаем значение 0,0159 (коэффициент передачи отрицательной связи по скорости  = 0,0159). = 0,0159).Для снятия механических характеристик замкнутой системы электропривода значение момента нагрузки устанавливаем в окне блока Constant. Затем производим пуск модели и показания Display заносим в таблицу 3. Снимаем механическую характеристику электропривода с разомкнутой обратной связью. Размыкаем обратную связь по скорости, а в окне блока Step устанавливаем: Final value – 1,787. Затем устанавливаем в окне блока Constant значение момента нагрузки и осуществляем пуск модели, показания приборов заносим в таблицу 4. Таблица 2 Расчетные коэффициенты модели
Таблица 3
Таблица 4
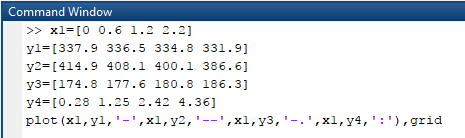 Рисунок 2 - Скрипт для расчета и построения характеристик  Рисунок 3 - Рабочие характеристики Выводы: 1. Применение отрицательной обратной связи по скорости повышает жесткость механических характеристик привода. 2. При действии отрицательной обратной связи статическая ошибка привода уменьшается в (1+k) раз, что дает возможность расширить диапазон регулирования скорости вращения привода. |










 , кгм2
, кгм2 , cˉ¹
, cˉ¹