Часть 2. 2. средства и способы измерения навигационных параметров
 Скачать 0.5 Mb. Скачать 0.5 Mb.
|

|
Тема 2. СРЕДСТВА И СПОСОБЫ ИЗМЕРЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ 2.1. Измерение и исправление пеленгов Пеленга на видимые визуально ориентиры измеряются с помощью оптических и обыкновенных (визирных) пеленгаторов. Оптические пеленгаторы устанавливаются на пеленгаторных репитерах гироскопических и дистанционных компасов. На магнитных компасах используются обыкновенные пеленгаторы. Как правило, оптические пеленгаторы отрегулированы и проверены в заводских условиях и не требуют особой подготовки перед измерениями. Необходимо лишь сделать внешний осмотр, установить нужную фокусировку, отрегулировать качество изображения ориентиров и видимой части картушки, проверить легкость вращения пеленгатора на азимутальном круге. Проверки и регулировки репитеров гирокомпасов производятся специалистами. При проверке обыкновенных пеленгаторов магнитных компасов делается их внешний осмотр (натяжение нити предметной мишени, вращение пеленгатора на азимутальном круге, целостность деталей пеленгатора). Проверки и регулировки положения призмы и визирной плоскости производятся рулевыми перед походом, а также при осмотре и проверке технических средств. Плоскость азимутального круга должна быть горизонтальна. Это особенно важно при пеленговании ориентиров, имеющих значительные угловые высоты. Наклон оптического пеленгатора контролируется с помощью уровня, видимого в поле зрения трубы. При пеленговании небесных светил, визирная плоскость пеленгатора наводится не на светило, а на его изображение в откидном зеркале. Снятие отсчета производится при совмещении визирной плоскости с ориентиром, не отрывая глаза от поля зрения трубы оптического или от щели глазной, мишени обыкновенного пеленгатора. Необходимо помнить, что под призмой обыкновенного пеленгатора магнитного компаса снимается отсчет, отличающийся от компасного пеленга на 180° (ОКП). Поэтому его необходимо исправить по формуле: КП = ОКП ± 180° Измеренные пеленга исправляются поправками компаса. При этом следует учитывать, что во время маневрирования и в течение часа после него поправка гироскопического компаса может значительно отличаться от ее постоянного значения. В этом случае для определения места целесообразнее использовать расстояния до береговых ориентиров. При использовании пеленгаторов на стабилизированных репитерах необходимо иметь в виду, что практически пеленговать можно только ориентиры, не имеющие угловых возвышений над горизонтом. 2.2. Измерение и исправление углов Горизонтальные углы между береговыми ориентирами и вертикальные, между видимым горизонтом береговой чертой или основанием ориентира и его вершиной измеряются секстаном. Точность измерений - до одной минуты. Навигационный секстан позволяет измерять углы до 140°. При подготовке секстана к наблюдениям необходимо: - закрепить оптическую трубу и отфокусировать ее по ориентиру; - проверить перпендикулярность зеркал плоскости лимба; - определить поправку индекса. Для проверки положения зеркал алидада устанавливается на нулевой отсчет. При горизонтальном положении секстана прямовидимое и дважды отраженное изображение видимого горизонта должны совпадать. При несовпадении производится регулировка перпендикулярности зеркал плоскости лимба по правилам, излагаемым в курсе мореходной астрономии. Поправка индекса определяется совмещением прямовидимого и дважды отраженного изображений видимого горизонта или береговой черты при вертикальном положении секстана. Если измерения связаны с необходимостью часто определять место, то поправка индекса уменьшается до значения, меньше одной минуты. В этом случае при прокладке изолиний она не учитывается. Для уменьшения поправки индекса алидада устанавливается на нуль, после чего корректировочным ключом поворачивается нижний винт малого зеркала до совмещения обоих изображений видимого горизонта. При измерении горизонтальных углов прямовидимым является левый ориентир. При необходимости иметь обсервованное место с высокой точностью углы измеряются одновременно двумя наблюдателями по команде "Ноль". Если измерения производятся одним наблюдателем, то первый угол измеряется дважды - до и после измерения второго угла, а для определения места используется его среднее значение. Для сокращения времени между измерениями одним наблюдателем целесообразно использовать два секстана, на которых установлены приближенные отсчеты измеряемых углов. Для исключения поправки за приведение углов к горизонту следует стремиться выбирать ориентиры с малыми угловыми возвышениями. В общем случае отсчет секстана должен быть исправлен поправкой индекса ἱ и инструментальной поправкой S. Последняя выбирается из паспорта секстана по величине измеренного угла. 2.3. Измерение и исправление расстояний При плавании в видимости берегов расстояния до береговых ориентиров измеряются, главным образом, с помощью навигационных радиолокационных станций (НРЛС), а до подводных ориентиров с помощью гидроакустических станций (ГАС). Навигационные РЛС обеспечивают измерение пеленгов и расстояний до ориентиров независимо от визуальной видимости. Определение расстояния с помощью НРЛС основано на измерении промежутка времени, необходимого для прохождения радиоимпульсом расстояния от корабля до облучаемого объекта и обратно:  где c - скорость распространения электромагнитной энергии в атмосфере. Максимальная дальность действия - наибольшее расстояние, на котором возможно обнаружение объектов, рассчитывается по формуле:  где  - в милях; - в милях;h – высота объекта от уровня моря, м;  – высота антенны от уровня моря, м. – высота антенны от уровня моря, м.В зависимости от высоты объекта наблюдения, его отражающей способности, технических характеристик РЛС и метеорологических условий береговые ориентиры наблюдаются на расстояниях до 30-50 миль. Ориентировочные дальности обнаружения объектов при высоте антенны 15 м показаны в табл. 2. Таблица 2 Ориентировочные дальности обнаружения объектов навигационной РЛС
Минимальная дальность действия - наименьшее расстояние, на котором объекты еще могут быть обнаружены, зависит как от технических характеристик НРЛС (длительность импульса, скорость срабатывания антенного переключателя), так и от высоты антенны и ее диаграммы направленности по вертикали (рис. 14). Для НРЛС “Дон” с высотой антенны 15 м “мертвая” зона r = 85 м. В пределах "мертвой" зоны малые объекты (бочки, катера, топляки, вехи) могут быть не обнаружены. 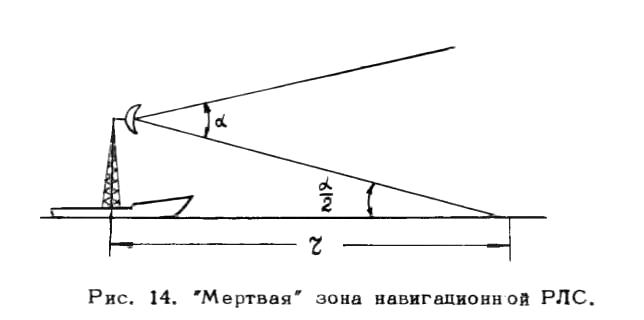 Рис. 14. “Мертвая” зона навигационной РЛС. Если антенна НРЛС расположена ниже некоторых надстроек (трубы, мачты) и антенн других РЛС, возможно наличие "теневых" секторов (рис. 15). Поэтому наравне с радиолокационным должно вестись круговое визуальное наблюдение. Особенно важно выполнение этого требования при плавании вблизи берега в условиях плохой видимости и ночью. Кроме того, необходимо периодически изменять курс и "просматривать" горизонт в "теневых" секторах.  Рис. 15. “Теневой” сектор навигационной РЛС Максимальные погрешности измерений по расстоянию при использовании подвижного круга дальности (ПКД): -  -  При измерении по неподвижным кругам дальности (НКД)  от интервала между кольцами. от интервала между кольцами.Погрешность измерения пеленга при наблюдении точечных ориентиров  . При пеленговании неточечных ориентиров погрешность пеленга значительно возрастает. . При пеленговании неточечных ориентиров погрешность пеленга значительно возрастает.В этом случае пеленг измеряется только для грубого контроля и опознания ориентира. Для уменьшения погрешностей измерений рекомендуется: 1. Использовать ПКД приемом "касания" к отметке объекта на экране РЛС. Толщина ПКД должна быть минимальной. Визир пеленга устанавливать на середину отметки. (рис. 16). 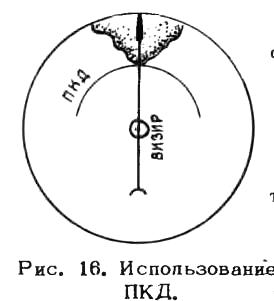 Рис. 16. Использование ПКД. 2. Выбирать для наблюдений точечные ориентиры (такие, отметка от которых на экране высвечивается точкой или небольшим пятном) или выступающую в сторону корабля часть береговой черты (мыс, мол). Время приведения станции в готовность к работе - 3-5 минут. Время непрерывной работы - до 24 часов. Наиболее сложным в навигационном использовании РЛС является чтение изображения на экране индикатора. Особенно трудно опознаются первые сигналы при подходе к незнакомому берегу. При опознании ориентиров рекомендуется учитывать следующее: 1. На экране индикатора РЛС появляются отметки только от тех ориентиров, которые находятся над радиолокационным горизонтом. 2. Контур низкого берега отображается слабо, с разрывами и значительно искажается. Линия уреза воды фактически может оказаться значительно ближе, чем засвеченная на экране кромка, так как радиоимпульс отражен от более удаленной возвышенной части берега. 3. Отметки от высоких и объемных сооружений на берегу (элеваторы, башни, холодильники, портальные краны и (т.п.), могут появиться на экране индикатора в виде отдельных отметок раньше, чем изображение береговой черты. 4. За высокими строениями и возвышенностями берега образуется зона "тени", в которой отметки от объектов не наблюдаются. 5. В общем случае изображение обрывистого берега на экране индикатора НРЛС примерно соответствует карте на расстояниях 10-15 миль (рис. 17, 18). Для повышения отражающей способности буев, вех и отдельных ориентиров на берегу на них могут быть установлены пассивные радиолокационные отражатели (РЛП) в виде сварных металлических конструкций, которые увеличивают дальность обнаружения в несколько раз. На некоторых важных навигационных ориентирах устанавливаются радиолокационные маяки - ответчики (РМО), которые ретранслируют полученный радиоимпульс в виде кодированного сигнала. Этот сигнал отображается на экране индикатора РЛС, что позволяет более уверенно опознавать ориентиры. В этом случае дополнительная поправка к измеренной дистанции (всегда отрицательная) выбирается из описания РМО. 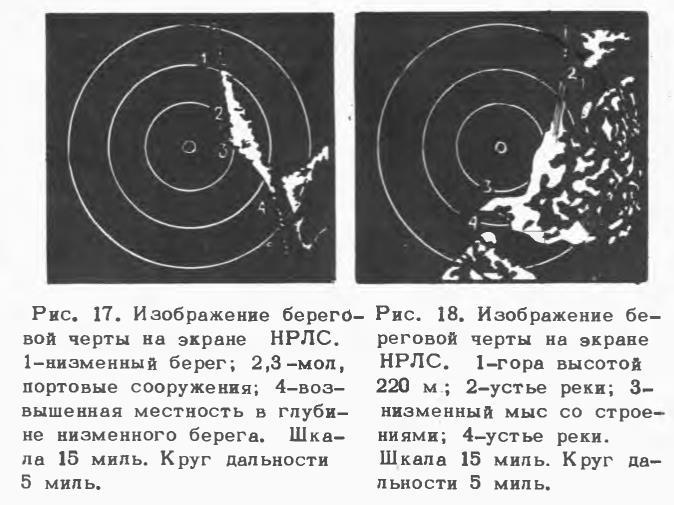 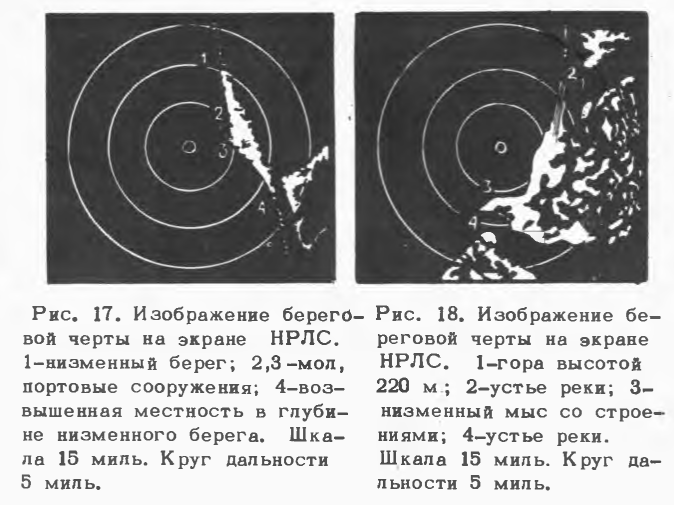 Рис. 17. Изображение береговой черты на экране НРЛС. 1 -неизменный берег; 2,3 - мол, портовые сооружения; 4 – возвышенная местность в глубине неизменного берега. Шкала 15 миль. Круг дальности 5 миль. Рис. 18. Изображение береговой черты на экране НРЛС. 1 – гора высотой 220м; 2 – устье реки; 3 – неизменный мыс со строениями; 4 – устье реки. Шкала 15 миль. Круг дальности 5 миль. Одновременно с измерением расстояний рекомендуется замечать пеленга на те же ориентиры. Это облегчает опознание ориентиров и повышает надежность обсервованного места (рис. 19). Существенно облегчает опознание ориентиров наличие в схеме НРЛС индикаторов истинного движения (ИИД). В таких индикаторах точка начала развертки перемещается по направлению курса со скоростью, пропорциональной скорости хода корабля. Управление перемещением центра развертки производится счетно-решающим устройством, работающим от гирокомпаса и лага. Для Определения направлений в ИИД используется электронный визир, а расстояний - дальномерное устройство. Измеренные расстояния и пеленга исправляются поправками.  Рис. 19. Опознание ориентиров.  ИП = РЛП +  ГК ГКПоправка к дистанции выбирается из формуляра РЛС или определяется по результатам выверки станции на специальном полигоне. При наличии остаточных систематических погрешностей по пеленгу (о чем делается отметка в формуляре станции) радиолокационный пеленг исправляется дополнительной поправкой ДРЛП. Иногда полезные отраженные сигналы "засвечиваются" помехами от полосы осадков, от низких грозовых облаков, сигналов РЛС и т.п. Поэтому следует систематически лично, не передоверяя оператору, наблюдать обстановку на экране индикатора и при сомнении в правильности опознавания ориентиров определять место только по трем, четырем изолиниям. Большую помощь в опознании ориентиров могут оказать изолинии, полученные другими способами (радиопеленг, изобата). Блок совмещения (картосчислительная приставка) обеспечивает оптическое совмещение радиолокационного изображения с морской навигационной картой (МНК). Блок представляет собой индикатор кругового обзора (ИКО), оборудованный полупрозрачным зеркалом, которое установлено под углом 45° к плоскости экрана (рис.20).  Рис. 20. Принцип действия блока совмещения. Отраженное от зеркала радиолокационное изображение обстановки (в масштабе карты) наблюдается одновременно с прямовидным изображением той же обстановки на карте. При совмещении изображений место корабля отличается в начале развертки светящимся перекрестием. Совмещение радиолокационного изображения побережья с его контуром на карте производится по точечным ориентирам и по участкам берега, облучаемым под углом 90°. На корабле целесообразно иметь специальный комплект карт, на которых береговая черта "поднята" черной тушью, а ориентиры с хорошей отражающей поверхностью выделены коричневым цветом. Блок совмещения позволяет уверенно определять место корабля на удалениях от берега до 5 миль. Простота и удобство использования, возможность непрерывного получения обсервованного места особенно ценны при плавании в узкостях. Средняя квадратическая погрешность совмещения изображений принимается равной 1,5 мм карты. Корабельные гидроакустические станции (ГАС) могут работать в гидролокационном и шумопеленгаторном режимах. В гидролокационном режиме ГАС излучает звуковые импульсы и принимает отраженные сигналы в виде эхо - сигналов или отметок на экране индикатора. В этом режиме определяется пеленг и дистанция до подводных объектов. Пеленга определяются по положению вибратора - излучателя относительно меридиана. Принцип измерения дистанции определяется формулой 2.1, но значение “c” в ней - скорость распространения звука в воде. В режиме шумопеленгования с помощью ГАС фиксируется только пеленг на источник звука (шума). В этом режиме ГАС на излучение не работает, что очень важно для обеспечения скрытности пл. Дальность действия ГАС в гидролокационном режиме зависит от технических параметров станции, от условий распространения звука в воде, от отражательной способности объекта и колеблется в диапазоне от нескольких кабельтов до десятков миль. Погрешности измерения расстояний  от от  , пеленгов - , пеленгов -  Для определения места с помощью ГАС используются подводные акустические отражатели, акустические маяки-ответчики, подводные звуковые маяки и естественный точечные подводные ориентиры, положение которых известно (затонувшие суда, резкие возвышения дна, молы и т .п .). При измерении расстояний до берегового склона необходимо учитывать, что сигналы отражаются не от уреза воды, а от отражающей изобаты (рис. 21). 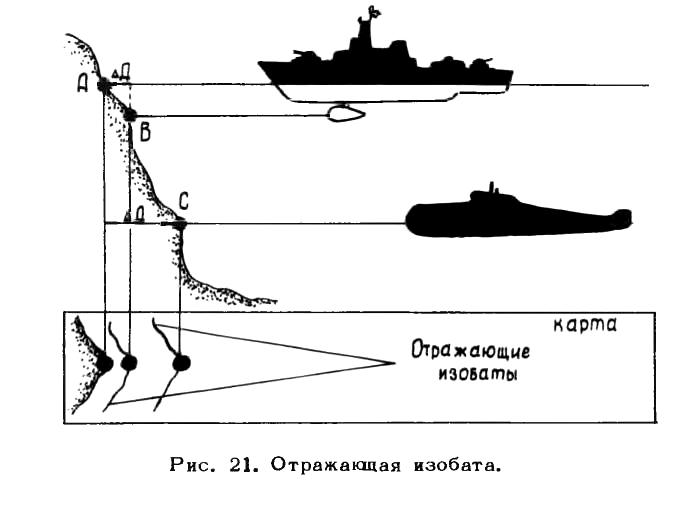 Рис. 21. Отражающая изобата. Вследствие значительных погрешностей измерений и трудности опознания неточечных ориентиров при определении места по ним рекомендуется одновременно измерять глубину и тщательно вести счисление пути. Возможность определять место корабля независимо от визуальной видимости, достаточная точность, автономность и обеспечение непрерывного кругового обзора определяют особую ценность РЛС как средства кораблевождения в видимости берегов. Однако некоторые трудности опознания естественных ориентиров и нарушение скрытности не позволяют отказаться от использования других технических средств кораблевождения. Если известна высота ориентира, то расстояние до него можно рассчитать по величине угла между его вершиной и основанием (урезом воды, линией видимого горизонта). При измерении углов между видимым горизонтом и вершиной ориентира отсчет секстана исправляется общей поправкой i + s и поправкой за наклонение горизонта d, выбираемой из табл. 11-а МТ -75 или измеряемой наклономером  = ОС + (ἱ + s) - d = ОС + (ἱ + s) - dЕсли измеряется угол между береговой чертой (или основанием ориентира) и его вершиной, то вместо поправки за наклонение горизонта вычитается поправка за наклонение зрительного луча  , которая выбирается из табл. 11-б МТ-75 = ОС + (ἱ + S ) - , которая выбирается из табл. 11-б МТ-75 = ОС + (ἱ + S ) - Расстояние до ориентира Д рассчитывается по табл. 29 МТ-75, аргументами для входа в которую являются разность высот ориентира и глаза Н — е и вертикальный угол β. Приближенно расстояние Д в милях до ориентира с видимым основанием можно рассчитать по формуле  где Н - высота ориентира, м; - вертикальный угол, мин.Погрешность рассчитанного по вертикальному углу расстояния определяется по формуле  где  - средняя квадратическая погрешность измерения вертикального угла, мин; - измеренный вертикальный угол, мин. - средняя квадратическая погрешность измерения вертикального угла, мин; - измеренный вертикальный угол, мин.2.4. Способы уменьшения погрешности обсервованного места из-за неодновременности измерения навигационных параметров При нанесении обсервованного места корабля на карту или при решении системы уравнений (1.2) предполагается, что навигационные параметры измерены одновременно. Однако практически это условие одному наблюдателю выполнить невозможно. В результате неодновременности измерений навигационных параметров обсервованное место получается с погрешностью. Допустим, что корабль фактически находится в точке K1 (рис. 22) и в этот момент измерен первый навигационный параметр, которому соответствует линия положения I - I. Когда корабль оказался в точке  , измерен второй навигационный параметр и получена линия положения II - II. Если не учитывать перемещение корабля за промежуток времени между измерениями параметров, место корабля на карте получится в точке 0 с погрешностью . , измерен второй навигационный параметр и получена линия положения II - II. Если не учитывать перемещение корабля за промежуток времени между измерениями параметров, место корабля на карте получится в точке 0 с погрешностью .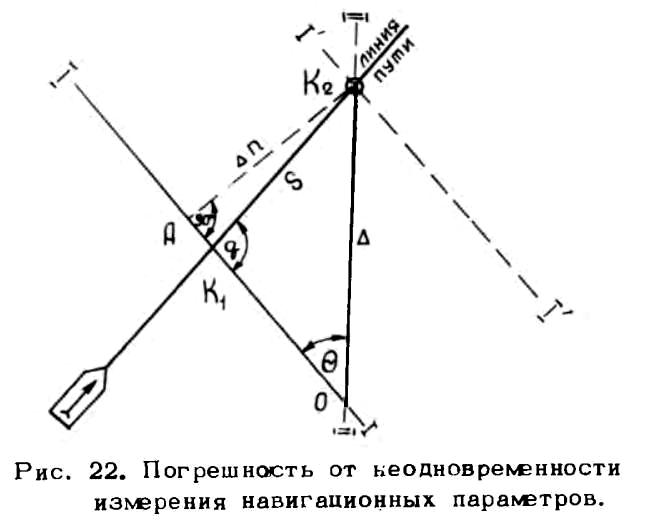 Рис. 22. Погрешность от неодновременности измерения навигационных параметров. Из треугольников  и и  : : . .Поэтому  , (2.5) , (2.5)где  – путевая скорость хода корабля; – путевая скорость хода корабля;t - промежуток времени между измерениями навигационых параметров; q - угол между направлением пути и первой линей положения; ϴ - угол между линиями положения. Из формулы (2.5): 1. Если первая линия положения (изолиния) совпадает с направлением линии пути (q=0), погрешность от неодновременности измерения навигационных параметров равна нулю с ( =0). Следовательно, первым необходимо измерять тот навигационный параметр, которому соответствует линия полонения (изолиния), располагающаяся под острым углом к линии пути. Очевидно, что при q = 0 первый навигационный параметр не изменяется. Поэтому настоящий вывод можно сформулировать и так: первым следует измерять тот навигационный параметр, который изменяется медленнее.Например, пеленг следует измерять первым на ориентир, расположенный ближе к диаметральной плоскости, а расстояние - до ориентира, расположенного ближе к траверзу. 2. Чем меньше скорость хода корабля и промежуток времени между измерениями, тем меньше погрешность , т.е. если нет возможности производить измерения одновременно, это следует делать в быстрой последовательности.3. Чем ближе угол θ к 90°, тем меньше величина погрешности, т.е. предпочтительнее измерять навигационные параметры относительно тех ориентиров, линии положения которых пересекаются под углом, близким к 90°. В практике кораблевождения обстановка, как правило, складывается так, что угол q≠0 а очередность измерений зависит от характеристики ориентиров. Так, в темное время суток первым пеленгуется маяк (огонь), имеющий большую продолжительность между проблесками. В светлое время суток первым пеленгуется тот ориентир, который плохо виден. Поэтому возникает необходимость приведения навигационных параметров или соответствующих им изолиний (линий положения) к одному моменту. Приведение навигационных параметров к одному моменту производится, как правило, в том случае, если они измерены достаточно быстро при небольшой скорости хода корабля. При этом предполагается, что в течение короткого промежутка времени навигационные параметры изменяются равномерно. Сущность приведения заключается в осреднении одного или двух параметров, измеряемых дважды. Например, последовательно измеряются пеленга на ориентиры А, В и С (рис. 23). В момент измерения пеленга на ориентир С замечается отсчет лага и время, а затем вновь измеряются пеленга на В и А. При этом следует стремиться, чтобы промежутки времени между измерениями в обеих сериях были соответственно одинаковы. Для расчетов и прокладки обсервованного места принимается среднее значение пеленгов на ориентиры А и В. 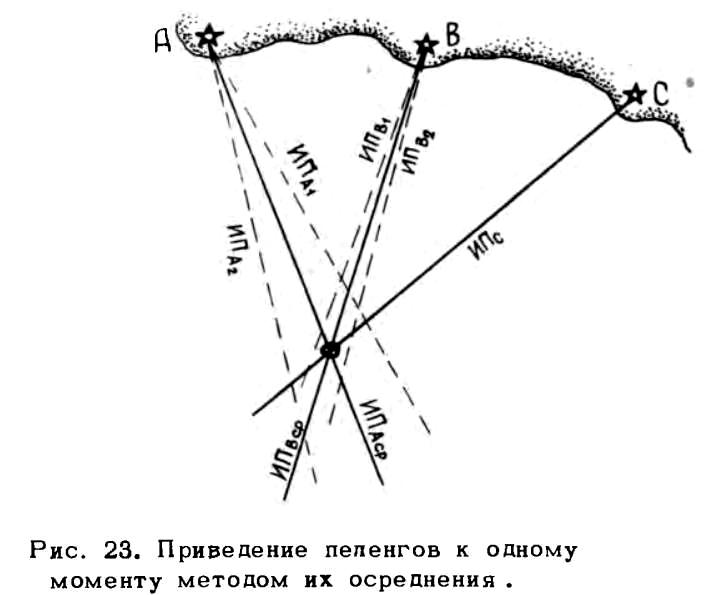 Рис. 23. Приведение пеленгов к одному моменту методом их осреднения. При значительных промежутках времени между измерениями навигационных параметров и большой скорости хода (параметры изменяются быстро и неравномерно) необходимо приводить к одному моменту изолинии (линии положения). Сущность расчетов и графических построений сводится к смещению изолиний (линий положения) параллельно самим себе по направлению линии пути на расстояние, пройденные кораблем за промежутки времени между измерениями соответствующих этим изолиниям параметров. Как правило, изолинии приводятся к моменту последнего измерения (рис.24). 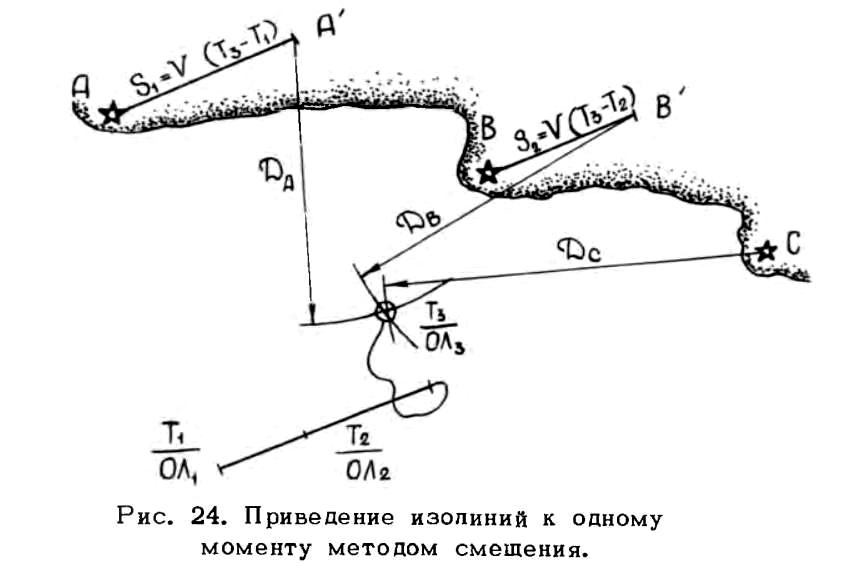 Рис. 24. Приведение изолиний к одному моменту методом смещения. Этому моменту будет соответствовать обсервованное место. |