Выбор схемы управления конвейром. выбор схемы управления конвееров с расчётом. 2 Выбор схемы управления приводом конвейеров
 Скачать 0.53 Mb. Скачать 0.53 Mb.
|

|
2.1. Выбор схемы управления приводом конвейеров. Для автоматизации процесса пуска приводных асинхронных двигателей отвального комплекса принимаю схему автоматического пуска асинхронного двигателя с фазным ротором в функции тока и динамического торможения . Динамическое торможение необходимо для более быстрой остановки ленточного конвейера , так как при свободном ходе часть горной массы , транспортируемой конвейером, попадает в перегрузочное устройство и может привести к заштыбовке его. Схема пуска асинхронного двигателя в одну ступень в функции тока и динамического торможения в функции скорости включает в себя контакторы КМ1, КМ2 и КМЗ; 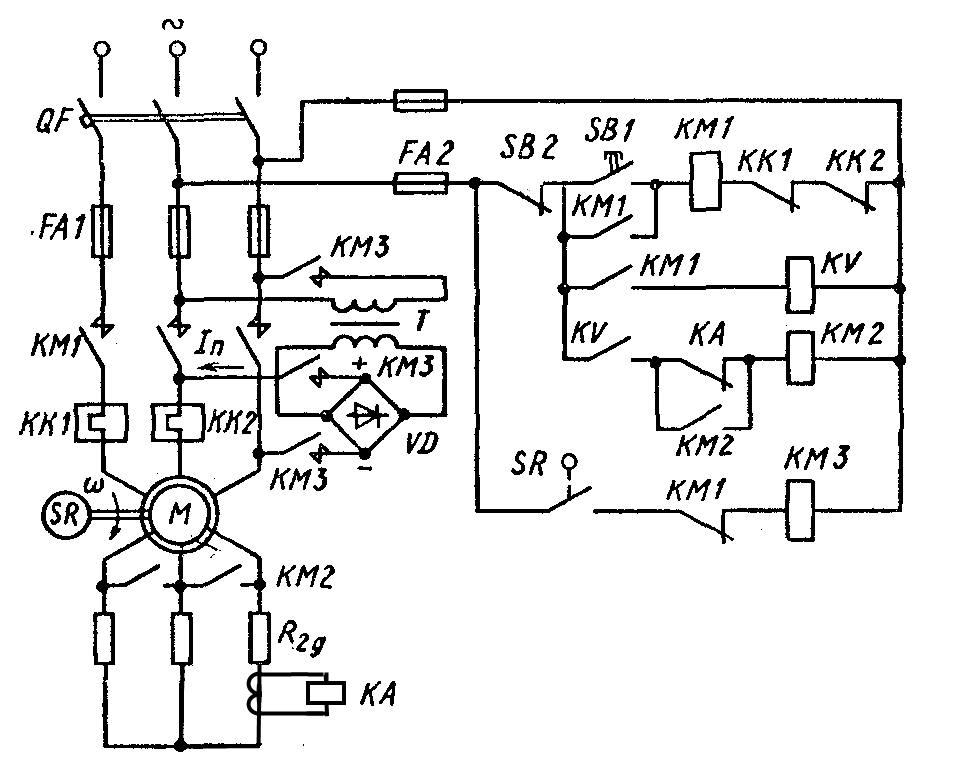 Рис. 10.36. Схема пуска АД в одну ступень в функции тока и динамического торможения в функции скорости реле тока КА; реле контроля скорости SR, реле напряжения промежуточное KV, понижающий трансформатор для динамического торможения Т; выпрямитель VD. Максимальная токовая защита осуществляется предохранителями FA1 и FA2, защита от перегрузки АД — тепловыми реле КК1 и КК2. После подачи с помощью автоматического выключателя QFнапряжения для пуска АД нажимается кнопка SB1 и включается контактор КМ1, через контакты которого статор двигателя подключается к сети. Бросок тока в цепи ротора вызовет включение реле тока КА и размыкание цепи контактора ускорения КМ2. Тем самым разбег АД начнется с пусковым резистором Яд2в цепи ротора. Включение контактора КМ1 приводит также к шунтированию кнопки SB1, размыканию цепи контактора торможения КМЗ и включению промежуточного реле напряжения KV, что тем не менее не приведет к включению контактора КМ2, так как до этого в этой цепи разомкнулся контакт реле К А. По мере увеличения скорости АД уменьшаются ЭДС и ток в роторе. При некотором значении тока в роторе, равном току отпускания реле КА, оно отключится и своим размыкающим контактом замкнет цепь питания контактора КМ2. Он включится, зашунтирует пусковой резистор R2a, АД выйдет на свою естественную характеристику. Отметим, что вращение АД вызовет замыкание контакта реле скорости SRв цепи контактора КМЗ, однако он не сработает, так как до этого разомкнулся контакт контактора КМ1. При остановке конвейера размыкается контакт SB2. Контактор КМ1 теряет питание и отключает АД от сети переменного тока. Благодаря замыканию контактов КМ1 включится контактор торможения КМЗ, контакты которого замкнут цепь питания обмотки статора от выпрямителя VD, подключенного к трансформатору Т, и тем самым осуществится перевод АД в режим динамического торможения. Одновременно с этим потеряют питание аппараты KVи КМ2, что приведет к вводу в цепь ротора резистора R2a. Двигатель начинает тормозиться. При скорости двигателя, близкой к нулю, реле контроля скорости SRразомкнет свой контакт в цепи катушки контактора КМЗ. Он отключится и прекратит торможение АД. Схема придет в исходное положение и будет готова к последующей работе. Принцип действия схемы не изменится, если катушку реле тока КА включить в фазу статора, а не ротора. Для управления работой двухдвигательного привода ЛК- 57 выбираю хему с переключением ступеней пускового резистора в функции времени с корректировкой по току. Коммутация первичных цепей электродвигателей конвейера осуществляется двумя индивидуальными контакторами QF2 и QF3. Третий общий контактор QF1 обеспечивает одновременную подачу напряжения на статорные обмотки двигателей M1 и М2 после включения индивидуальных контакторов QF2 и QF3. Порядок запуска ленточного конвейера следующий. Включаются автоматы цепей управления SA1, SA2 и SA3. Включение автомата SA1 приводит к появлению тока в катушке реле времени КТ1, что вызывает его срабатывание и замыкание контакта КТ 1.1 в цепи катушки реле времени КТ2. Это в свою очередь приводит к его включению и так до тех пор, пока все реле времени не включатся. Все реле времени, включившись, замыкают контакты КТ1.2—КТ6.2 и размыкают контакты КТ1.3—КТ6.3. 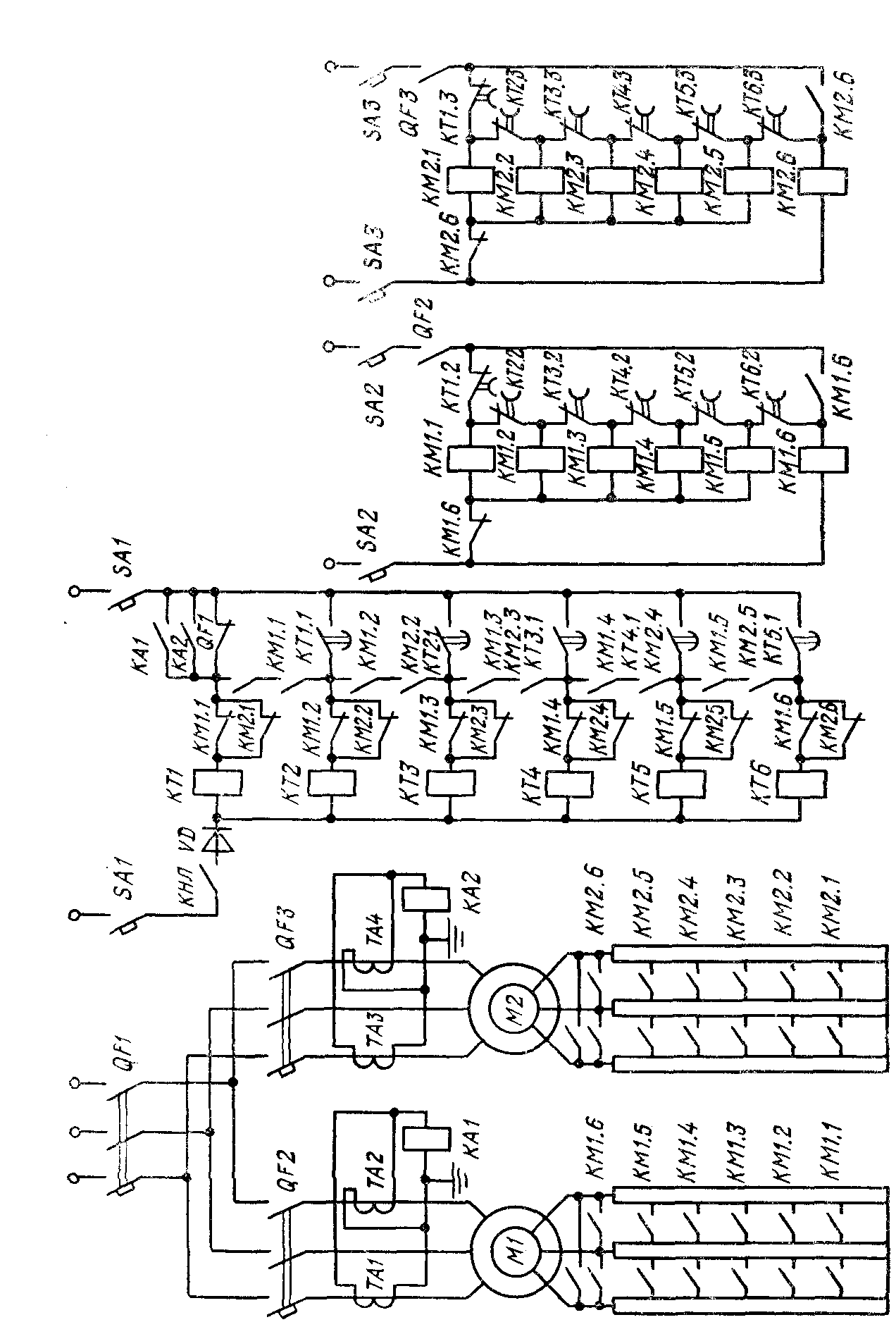 Для запуска двигателей сначала включаются контакторы QF2 и QF3, что приводит к замыканию их контактов QF2 и QF3 в цепях питания контакторов ускорения КМ1 и КМ2. Затем включается масляный выключатель QF3. Двигатели M1 и М2, получив питание, приходят во вращение при полностью включенном сопротивлении пускового резистора. Эта ступень называется предварительной и предназначена для выбора зазоров в передаче и слабины тягового органа. Одновременно с включением масляного выключателя QF1 размыкается его контакт QF1, вызывая обесточивание первого реле времени КТ1. Оно с выдержкой времени, необходимой для выбора зазоров в передаче и слабины тягового органа, замыкает свои контакты КТ1.2 и КТ1.3 в цепях катушек контакторов ускорения КМ1.1 и КМ2.1 и размыкает свой контакт КТ1.1 в цепи второго реле времени КТ2. Контакторы ускорения КМ1.1 и КМ2.1, включившись, замыкают свои главные контакты КМ1.1 и КМ2.1, шунтирующие первую ступень пускового резистора, а размыкающие блок-контакты КМ 1.1 и КМ2.1 размыкаются и замыкающие блок-контакты КМ1.1 и КМ2.1 замыкаются. Переход на вторую пусковую ступень сопровождается бросками токов в двигателях, вызывающих включение реле тока КА1 и КЛ2. Замкнувшиеся контакты КА1 и КА2 этих реле вновь подключают реле времени КТ2 к источнику тока. И только тогда, когда токи двигателей M1 и М2 снизятся до значений, соответствующих моментам переключений на вторую пусковую ступень, контакты реле КА1 и КА2 разомкнутся и разорвут цепь питания катушки КТ2. Реле времени, обесточившись, замыкает свои контакты КТ2.2 и КТ2.3, вызывая включение контакторов ускорения КМ 1.2 и КМ2.2, и размыкает контакт КТ2.1, обесточивая реле времени третьей ступени пускового резистора КТЗ. Но шунтирование второй пусковой ступени резистора контактами КМ1.2 и КМ2.2 вызывает вновь увеличение токов двигателей и включение реле тока КА1 и КА2. Замыкание их контактов, а также контактов КМ1.2 и КМ2.2 создает цепь для питания реле времени КТЗ: автомат SA1 — контакт КНЛ — диод VD— катушка реле КТЗ—контакт КМ1.3 (или КМ2.3)— контакты КМ2.2, КМ1.2, КМ2.1, КМ1.1, КА1 (или КА2). По мере увеличения частоты вращения двигателей их токи снижаются и при моментах, соответствующих моментам переключения, контакты токовых реле КА1 и КА2 размыкаются и реле времени КТЗ, обесточившись, замыкает свои контакты КТЗ.2 и КТЗ.З, вызывая включение контакторов ускорения КМ1.3 и КМ2.3 и шунтирование третьей ступени пускового резистора. Аналогично идет процесс шунтирования пусковых ступеней до замыкания последних контактов КМ1.6 и КМ2.6, когда двигатели начинают работать на естественных механических характеристиках. К этому моменту все реле времени КТ1—КТ5 и контакторы ускорения КМ1.1—КМ 1.5 и КМ2.1—КМ2.5 обесточены. 2.2. Выбор аппаратуры управления. Для управления работой двигателей конвейеров выбираю контактор типа КТ. Выбор контакторов свожу в таблицу 2.1. Таблица 2.1.
Тепловые реле предназначены для защиты двигателей от перегрузок. Устанавливаю реле вне двигателя на главных цепях. Выбор тепловых реле. Для ЛК-56: - определяю ток уставки срабатывания реле Iу=Кр·Кн·Iн=1,1·1,3·92=131 А, где Кр=1,1-коэффициент разброса, Кн=1,3 – коэффициент надёжности. Выбираю для защиты тепловое реле типа РТТ с Iн=160А. Выбор тепловых реле для остальных двигателей свожу в таблицу2.2. Таблица 2.2.
Для защиты цепей управления электродвигателей выбираю предохранители ПР (рис. 3.1) с закрытыми разборными патронами без заполнителя. Предохранитель состоит из фибровой трубки 1 повышенной механической прочности с концевыми латунными обоймами 3, на которые навернуты колпачки 4. Внутри трубки вставлена плавкая штампованная цинковая вставка 2, связанная с выводными зажимами 6 болтовым  Рис. 3.1. Плавкий предохранитель ПР соединением и удерживаемая внутри трубки в фиксированном положении двумя пластинами 5. Выводные зажимы соединены гайками с токоведущим болтом, к которому подводится питание гибкими проводами в изоляционной оплетке. Расчёт пусковых сопротивлений для электродвигателя 4АНК250SА4УЗ ЛК-56 И отвалообразователей веду по методике предложенной [6 ст. 56]. Критическое скольжение на естественной характеристике где, sн=4,5% - номинальное скольжение двигателя, λМ=2,3 – перегрузочная способность двигателя [2 ст. 61]. Определяем скольжение sе1 на естественной характеристике при моменте М1. С учётом, что sе1 не может быть больше sке , получим  Сопротивление фазы ротора где Uрн=180 В – номинальное напряжение ротора [2 ст. 61]., Iрн=250 А– номинальный ток ротора [2 ст. 61]. Полное сопротивление фазы ротора Сопротивление реостата Расчёт пусковых сопротивлений для электродвигателя 4АНК280S4УЗ ЛК-57, ЛК-60, ЛК-61 веду аналогично. Критическое скольжение на естественной характеристике где, sн=2,9 % - номинальное скольжение двигателя [2 ст. 61, λМ=2 – перегрузочная способность двигателя [2 ст. 61]. Определяем скольжение sе1 на естественной характеристике при моменте М1. С учётом, что sе1 не может быть больше sке , получим  Сопротивление фазы ротора где Uрн=251 В – номинальное напряжение ротора [2 ст. 61]., Iрн=330 А – номинальный ток ротора [2 ст. 61]. Полное сопротивление фазы ротора Сопротивление реостата Расчёт пусковых сопротивлений для электродвигателя 4АНК280М4УЗ ЛК-59. Критическое скольжение на естественной характеристике где, sн=2,6 % - номинальное скольжение двигателя [2 ст. 61, λМ=2 – перегрузочная способность двигателя [2 ст. 61]. Определяем скольжение sе1 на естественной характеристике при моменте М1. С учётом, что sе1 не может быть больше sке , получим  Сопротивление фазы ротора где Uрн=300 В – номинальное напряжение ротора [2 ст. 61]., Iрн=330 А – номинальный ток ротора [2 ст. 61]. Полное сопротивление фазы ротора Сопротивление реостата Расчёт пусковых сопротивлений для электродвигателя 4АНК225М4УЗ ЛК-62. Критическое скольжение на естественной характеристике где, sн=3,6 % - номинальное скольжение двигателя [2 ст. 61, λМ=2,5 – перегрузочная способность двигателя [2 ст. 61]. Определяем скольжение sе1 на естественной характеристике при моменте М1. С учётом, что sе1 не может быть больше sке , получим  Сопротивление фазы ротора где Uрн=170 В – номинальное напряжение ротора [2 ст. 61]., Iрн=200 А – номинальный ток ротора [2 ст. 61]. Полное сопротивление фазы ротора Сопротивление реостата В качестве промежуточного реле напряжения принимаю реле РН-50 с характеристикой: - номинальное напряжение, В - - 380 ; - напряжение срабатывания, В - - 320 ; - время срабатывания, с. - - 0,15. В качестве реле скорости использую магнитоиндукционный датчик ДМ с релейным усилителем. На рис. 107, а представлена схема установки магнитоиндукцион-иого датчика ДМ у поддерживающего ролика конвейера. При вращении ролика, на конце которого выполнено подобие звездочки, под сердечником периодически проходят металлические выступы 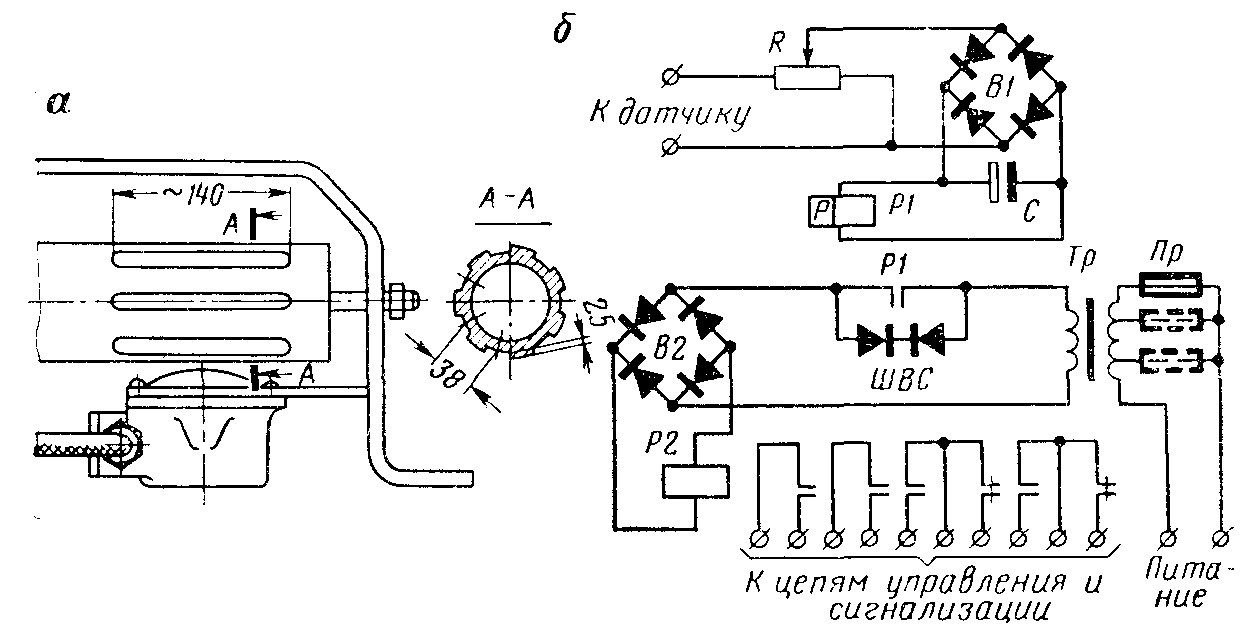 Рис. 107. Магнитоиндукционный датчик и релейный усилитель: а — схема установки датчика; б ■— схема релейного усилителя и в обмотке датчика наводится э. д. с, достаточная для питания релейного усилителя (рис. 107, б). На выход обмотки датчика через двухполупериодный выпрямитель В1 подключается поляризованное реле Р1. При номинальной скорости вращения реле Р1 срабатывает и включает исполнительное реле Р2, которое получает питание от сети 127, 220 или 380 В. Преимуществом магнитоиндукционного датчика является отсутствие непосредственного контакта с движущимися элементами конвейера, что обеспечивает большую надежность в работе и удобство в эксплуатации. 2.3. Автоматизация отвального комплекса. Для управления отвальным комплексом и контроля работы конвейеров принимаю комплекс автоматизированного управления конвейерами АУК.1М. Пульт управления имеет взрывобезопасный корпус, в котором закреплена съёмная часть с расположенными на ней элементами электрической схемы. На крышке корпуса имеются нажимные штоки трех кнопок: «Пуск», «Сигнал», «Стоп» и окно для наблюдения за состоянием лампы НЗ . Съёмная часть пульта управления вставляется в корпус по двум направляющим и крепится двумя болтами. На передней панели съёмной части расположен блок из четырех реле типа РКН, защищенных от механических повреждений несъемной поворотной крышкой из пластмассы. Выносной прибор-указатель ВПУ выполнен в виде отдельного металлического корпуса, в котором расположены: прибор-указатель числа работающих конвейеров с лампами подсветки и настроечными резисторами, блок телефона и клемник для подключения кабеля, соединяющего ВПУ с пультом управления. ВПУ можно устанавливать не только возле пульта, но и на некотором расстоянии от него, в месте, удобном для обслуживающего персонала. В нижней части правой боковой стенки ВПУ имеется крючок для навески телефонной трубки. Конструкция блока управления по общей компоновке элементов аналогична конструкции пульта управления и отличается следующим: передняя нижняя часть крышки корпуса имеет пять нажимных штоков для кнопок «Проверка», «Рем. — Авт.», «Разговор», «Сигнал» и «Стоп»; кнопка переключателя режимов работы «Рем.—-Авт.» может быть зафиксирована в положении «Рем.», а в положении «Авт.» — опломбирована; верхняя часть крышки имеет смотровое окно для наблюдения за показаниями прибора настройки реле скорости и состоянием ламп. На передней панели выемочной части блока управления размещены: прибор контроля настройки реле скорости, блок реле скорости БРС, блок реле РКН, блок отсчета времени и телефона БОВТ и блок заштыбовки БЗ. Блок дистанционного управления БДУ последним конвейером состоит из БОВТ, дополненного элементами дистанционного управления: реле дистанционного включения , конденсатором и перемычками, предназначенными для преобразования любого линейного блока в блок хвостового конвейера. Блок концевого реле БКР имеет металлический корпус, в котором размещены: концевое реле типа РКН, диоды , резисторы и конденсатор . Выполнение технологических команд и общий принцип работы комплекса. Пуск конвейерной линии осуществляется командами, выдаваемыми с пульта управления через линию связи на блоки управления. Порядок выполнения команд после кратковременного нажатия кнопки «Пуск» пульта управления следующий: 1) по линии подается предупредительный звуковой сигнал; 2) не менее чем через 5 с с пульта на первый блок управления поступит пусковая полярность; 3) с первого блока управления поступает сигнал включения пускателя первого конвейера, он запускается и от сигнала датчика скорости включится реле скорости; 4) пусковая полярность поступает на второй, затем на третий и т. д. блоки управления; 5) при включении реле скорости в последнем блоке управления пусковая полярность поступает в блок концевого реле БКР; 6) включается БКР и по линии сигнализации (провод 2„ «Земля») выдается команда на прекращение пуска на пульт управления; 7) на пульте происходит переключение пусковой полярности на рабочую, блок БКР отключается; 8) все конвейеры работают в режиме контроля заданных параметров (скорости, пробуксовки, заштыбовки и др.). При необходимости запуска части конвейерной линии оператор в период пуска следит по прибору-указателю за числом включившихся конвейеров, а при включении требуемого числа нажатием кнопки «Сигнал» отключает реле КЗ, которое, в свою очередь, отключает реле К2, и дальнейший запуск прекращается. Запуск оставшихся конвейеров осуществляется аналогично пуску конвейеров линии. Оперативный останов конвейерной линии осуществляется нажатием кнопки «Стоп» на пульте управления. При этом отключаются реле К5, К4 и реле К1 всех блоков управления. При; нажатии кнопки «Стоп» блока управления отключаются конвейер, управляемый данным блоком, и все последующие конвейеры. Экстренное прекращение пуска осуществляется нажатием кнопки «Сигнал» пульта или любого блока управления, вызывающим прекращение запуска последующих конвейеров, кроме тех, которые достигли номинальной скорости рабочих органов. Аварийный останов конвейера или экстренное прекращение запуска линии осуществляется замыканием накоротко голых проводов или воздействием на кабель-трос любого выключателя КТВ-2, обеспечивающего отключение аварийного и всех последующих конвейеров. Аварийный останов и экстренное прекращение пуска происходит также при срабатывании средств защиты и контроля работы конвейеров при затянувшемся пуске, снижении скорости рабочего органа или его поперечном разрыве, срабатывании тепловой защиты, потере связи между редуктором и приводной звездочкой, утечке масла из турбомуфты. Режим местного управления отдельным конвейером в комплексе АУК.1М назван ремонтно-наладочным («Рем».) с целью предупредительного напоминания, что применение его допустимо только при ремонте, наладке и настройке. При работе конвейера в режиме «Рем.» сохраняется действие всех видов защиты и контроля работы, что и в режиме «Авт.» Управление отдельным конвейером в режиме «Рем.» осуществляется кнопками «Сигнал», «Проверка» и «Стоп» блока управления в таком порядке: 1) нажимаются кнопки «Сигнал» и «Проверка», которые после появления звукового сигнала отпускаются; 2) через 5—6 с после отпускания кнопок должен включиться конвейер, прекратиться звуковой сигнал и начаться процесс разгона рабочего органа. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||