полупроводниковые резисторы. 3. Диоды выпрямительные. Основные свойства и характеристики. 3
 Скачать 3.83 Mb. Скачать 3.83 Mb.
|

57. Микропроцессоры. Основные понятия, характеристики и классификация. Структура и функциональная организация микропроцессора.Микропроце́ссор — процессор (устройство, отвечающее за выполнение арифметических, логических операций и операций управления, записанных в машинном коде), реализованный в виде одной микросхемы или комплекта из нескольких специализированных микросхем (в отличие от реализации процессора в виде электрической схемы на элементной базе общего назначения или в виде программной модели). В состав микропроцессора входят следующие устройства. 1. Арифметико-логическое устройство предназначено для выполнения всех арифметических и логических операций над числовой и символьной информацией. 2. Устройство управления координирует взаимодействие различных частей компьютера. Выполняет следующие основные функции: формирует и подает во все блоки машины в нужные моменты времени определенные сигналы управления (управляющие импульсы), обусловленные спецификой выполнения различных операций; формирует адреса ячеек памяти, используемых выполняемой операцией, и передает эти адреса в соответствующие блоки компьютера; получает от генератора тактовых импульсов обратную последовательность импульсов. 3. Микропроцессорная память предназначена для кратковременного хранения, записи и выдачи информации, используемой в вычислениях непосредственно в ближайшие такты работы машины. Микропроцессорная память строится на регистрах и используется для обеспечения высокого быстродействия компьютера, так как основная память не всегда обеспечивает скорость записи, поиска и считывания информации, необходимую для эффективной работы быстродействующего микропроцессора. 4. Интерфейсная система микропроцессора предназначена для связи с другими устройствами компьютера. Включает в себя: внутренний интерфейс микропроцессора; буферные запоминающие регистры; схемы управления портами ввода-вывода и системной шиной. (Порт ввода-вывода — это аппаратура сопряжения, позволяющая подключить к микропроцессору , другое устройство.) К микропроцессору и системной шине наряду с типовыми внешними устройствами могут быть подключены и дополнительные платы с интегральными микросхемами, расширяющие и улучшающие функциональные возможности микропроцессора. К ним относятся математический сопроцессор, контроллер прямого доступа к памяти, сопроцессор ввода-вывода, контроллер прерываний и др. Математический сопроцессор используется для ускорения выполнения операций над двоичными числами с плавающей запятой, над двоично-кодированными десятичными числами, для вычисления тригонометрических функций. Математический сопроцессор имеет свою систему команд и работает параллельно с основным микропроцессором, но под управлением последнего. В результате происходит ускорение выполнения операций в десятки раз. Модели микропроцессора, начиная с МП 80486 DX, включают математический сопроцессор в свою структуру. Контроллер прямого доступа к памяти освобождает микропроцессор от прямого управления накопителями на магнитных дисках, что существенно повышает эффективное быстродействие компьютера. Сопроцессор ввода-вывода за счет параллельной работы с микропроцессором значительно ускоряет выполнение процедур ввода-вывода при обслуживании нескольких внешних устройств, освобождает микропроцессор от обработки процедур ввода-вывода, в том числе реализует режим прямого доступа к памяти. Прерывание — это временный останов выполнения одной программы в целях оперативного выполнения другой, в данный момент более важной. Контроллер прерываний обслуживает процедуры прерывания, принимает запрос на прерывание от внешних устройств, определяет уровень приоритета этого запроса и выдает сигнал прерывания в микропроцессор. Все микропроцессоры можно разделить на группы: микропроцессоры типа CISC с полным набором системы команд; микропроцессоры типа RISC с усеченным набором системы команд; микропроцессоры типа VLIW со сверхбольшим командным словом; микропроцессоры типа MISC с минимальным набором системы команд и весьма высоким быстродействием и др. Важнейшими характеристиками микропроцессора являются: тактовая частота. Характеризует быстродействие компьютера. Режим работы процессора задается микросхемой, называемой генератором тактовых импульсов. На выполнение процессором каждой операции отводится определенное количество тактов. Тактовая частота указывает, сколько элементарных операций выполняет микропроцессор за одну секунду. Тактовая частота измеряется в МГц; разрядность процессора — это максимальное количество разрядов двоичного числа, над которым одновременно может выполняться машинная операция. Чем больше разрядность процессора, тем больше информации он может обрабатывать в единицу времени и тем больше, при прочих равных условиях, производительность компьютера; 58. Микропроцессорная система. Архитектура микропроцессорных систем.Микропроцессорная система (МС) представляет собой функционально законченное изделие, состоящее из одного или нескольких устройств, главным образом микропроцессорных: микропроцессора и/или микроконтроллера. Цифровая́ обрабо́тка сигна́лов (ЦОС) – преобразование сигналов, представленных в цифровой форме. До сих пор мы рассматривали только один тип архитектуры микропроцессорных систем — архитектуру с общей, единой шиной для данных и команд (одношинную, или принстонскую, фон-неймановскую архитектуру ). Соответственно, в составе системы в этом случае присутствует одна общая память, как для данных, так и для команд (рис. 1.15).  Рис. 1.15. Архитектура с общей шиной данных и команд. Но существует также и альтернативный тип архитектуры микропроцессорной системы — это архитектура с раздельными шинами данных и команд (двухшинная, или гарвардская, архитектура ). Эта архитектура предполагает наличие в системе отдельной памяти для данных и отдельной памяти для команд (рис. 1.16). Обмен процессора с каждым из двух типов памяти происходит по своей шине. Архитектура с общей шиной распространена гораздо больше, она применяется, например, в персональных компьютерах и в сложных микрокомпьютерах. Архитектура с раздельными шинами применяется в основном в однокристальных микроконтроллерах. Рассмотрим некоторые достоинства и недостатки обоих архитектурных решений. Архитектура с общей шиной (принстонская, фон-неймановская) проще, она не требует от процессора одновременного обслуживания двух шин, контроля обмена по двум шинам сразу. Наличие единой памяти данных и команд позволяет гибко распределять ее объем между кодами данных и команд. Например, в некоторых случаях нужна большая и сложная программа, а данных в памяти надо хранить не слишком много. В других случаях, наоборот, программа требуется простая, но необходимы большие объемы хранимых данных. Перераспределение памяти не вызывает никаких проблем, главное — чтобы программа и данные вместе помещались в памяти системы. Как правило, в системах с такой архитектурой память бывает довольно большого объема (до десятков и сотен мегабайт). Это позволяет решать самые сложные задачи.  Рис. 1.16. Архитектура с раздельными шинами данных и команд. Архитектура с раздельными шинами данных и команд сложнее, она заставляет процессор работать одновременно с двумя потоками кодов, обслуживать обмен по двум шинам одновременно. Программа может размещаться только в памяти команд, данные — только в памяти данных. Такая узкая специализация ограничивает круг задач, решаемых системой, так как не дает возможности гибкого перераспределения памяти. Память данных и память команд в этом случае имеют не слишком большой объем, поэтому применение систем с данной архитектурой ограничивается обычно не слишком сложными задачами. В чем же преимущество архитектуры с двумя шинами (гарвардской)? В первую очередь, в быстродействии. Дело в том, что при единственной шине команд и данных процессор вынужден по одной этой шине принимать данные (из памяти или устройства ввода/вывода ) и передавать данные (в память или в устройство ввода/вывода ), а также читать команды из памяти. Естественно, одновременно эти пересылки кодов по магистрали происходить не могут, они должны производиться по очереди. Современные процессоры способны совместить во времени выполнение команд и проведение циклов обмена по системной шине. Использование конвейерных технологий и быстрой кэш-памяти позволяет им ускорить процесс взаимодействия со сравнительно медленной системной памятью. Повышение тактовой частоты и совершенствование структуры процессоров дают возможность сократить время выполнения команд. Но дальнейшее увеличение быстродействия системы возможно только при совмещении пересылки данных и чтения команд, то есть при переходе к архитектуре с двумя шинами. В случае двухшинной архитектуры обмен по обеим шинам может быть независимым, параллельным во времени. Соответственно, структуры шин (количество разрядов кода адреса и кода данных, порядок и скорость обмена информацией и т.д.) могут быть выбраны оптимально для той задачи, которая решается каждой шиной. Поэтому при прочих равных условиях переход на двухшинную архитектуру ускоряет работу микропроцессорной системы, хотя и требует дополнительных затрат на аппаратуру, усложнения структуры процессора. Память данных в этом случае имеет свое распределение адресов, а память команд — свое. Проще всего преимущества двухшинной архитектуры реализуются внутри одной микросхемы. В этом случае можно также существенно уменьшить влияние недостатков этой архитектуры. Поэтому основное ее применение — в микроконтроллерах, от которых не требуется решения слишком сложных задач, но зато необходимо максимальное быстродействие при заданной тактовой частоте. 59. Электронные генераторы. Основные понятия. Классификация. Условия самовозбужденияЭлектронный генератор (генератор периодических колебаний) - это устройство, посредством которого энергия внешнего источника преобразуется в сигналы требуемой частоты и мощности. Классификация: По форме: гармонические, негармонические (релаксационные) По частоте: инфранизкие, низкочастотные, высокочастотные, сверхвысокочастотные По мощности: маломощные, средней мощности, мощные По типу обратной связи: LC, RC По принципу управления: автогенераторы, с внешним возбуждением 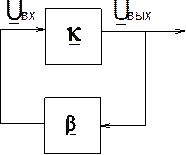 Состоит из усилителя с коэффициентом усиления Коэффициенты В качестве звеньев ОС используются частотно зависимые цепи: LC-контуры, либо RC-четырехполюсники. Условия самовозбуждения: k*b =1 (в комплексной форме) Равенство 1) 2) 60. LC-генераторы гармонических колебаний.https://pp.userapi.com/c850420/v850420693/14408d/ByALQrGUohs.jpg 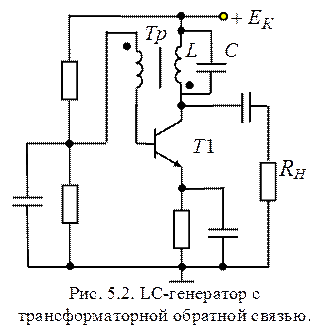 61. RC-генераторы.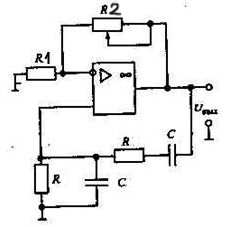 ООС задаёт Ku ПОС (мост Вина) - ЧИЦ (частотно-избирательная цепь) f = 1 / (2pi*RC) - частота квазирезонанса Условие баланса фаз выполняется (см. вопрос 33) т.к.: Фи k = 0 т.к. усилитель неинвертирущий Фи b = 0 на частоте квазирезонанса 62. Кварцевые генераторыКварцевый генератор - автогенератор электромагнитных колебаний с колебательной системой в состав которой входит кварцевый резонатор. Предназначен для получения колебаний постоянной частоты с высокой температурной и временной устойчивостью, низким уровнем шумов. Кварцевый резонатор - прибор в котором пьезоэлектрический эффект и явлений механического резонанса используются для постороения высокодобротного резонансного элемента электрической схемы.  - Обозначение кварцевого резонатора - Обозначение кварцевого резонатора 63. Электронные импульсные генераторы. Мультивибраторы.Импульсный генератор - электронное устройство для создания одиночных или последовательностей электрических импульсов. Обычно импульсный генератор состоит из задающего источника колебаний и формирователя, создающего импульсы необходимой формы (например, прямоугольной), длительности и амплитуды (мощности). Источником колебаний может служить генератор гармонических (синусоидальных) колебаний или релаксационный. Основу формирователей импульсов составляют линейные электрические элементы и электронные ключи. Функции линейных элементов выполняют импульсные усилители, дифференцирующие и интегрирующие цепи, импульсные трансформаторы и линии задержки. В качестве ключей используются электронные приборы с нелинейной вольт-амперной характеристикой (диоды, транзисторы, электронные лампы и др.). Нелинейные (ключевые) формирователи характеризуются отсутствием положительной обратной связи; формирование импульсов происходит за счет ограничения уровня сигнала или переключения тока в выходной цепи.Высоковольтные импульсные генераторы широко применяются, например, для испытаний изоляции различного электрооборудования, имитации внутренних и грозовых перенапряжений в электрической сети и др. Мультивибратор — прибор для создания несинусоидальных колебаний. На выходе получается сигнал любой другой формы, кроме синусоидальной волны. Частота сигнала в мультивибраторе определяется сопротивлением и емкостью, а не индуктивностью и емкостью. Мультивибратор состоит из двух каскадов усилителя, выход каждого каскада подается на вход другого каскада. 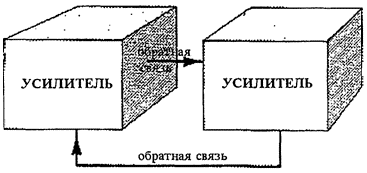 Принцип действия мультивибратора Мультивибратор может создавать волну почти любой формы, в зависимости от двух факторов: сопротивления и емкости каждого из двух каскадов усилителя и от того, откуда в цепи снимается выход.Например, если сопротивление и емкость двух каскадов равны, один каскад проводит 50% времени и другой каскад проводит 50% времени. Для примера предположим, что емкости обоих каскадов равны. Когда эти условия существуют, выходной сигнал является прямоугольной волной. Бистабильные мультивибраторы (или «флип-флоп») имеют два устойчивых состояния. В устойчивом состоянии один из двух каскадов усилителя находится в состоянии проводимости, а другой каскад не проводит. Для того, чтобы перейти от одного устойчивого состояния к другому, бистабильный мультивибратор должен получить внешний сигнал.Этот внешний сигнал называется внешним импульсом триггера. Он инициирует переход мультивибратора из одного состояния в другое. Другой триггерный импульс необходим, чтобы перевести цепь обратно в ее исходное состояние. Эти триггерные импульсы называются «запуск» и «перезапуск». |