Роботехника. 3. Структура и устройство промышленных роботов Определение промышленного робота
 Скачать 88.01 Kb. Скачать 88.01 Kb.
|

|
3. Структура и устройство промышленных роботов 3.1. Определение промышленного робота В отличие от понятия "Робот", понятие "Промышленный робот" имеет более четкое определение. Например, в соответствии с ГОСТ 25686-85 под ПР понимается стационарная или передвижная автоматическая машина, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и перепрограммируемого устройства программного управления для выполнения в производственном процессе двигательных и управляющих функций. Причем в примечании к этому определению подчеркивается, что перепрограммируемость - это свойство промышленного робота, состоящее в способности заменять управляющую программу автоматически или при помощи человека-оператора. Основная особенность ПР заключается в том, что он предназначен для совместной работы с другим технологическим оборудованием и, во существу, представляет собой элемент этого оборудования, позволяющий создавать роботизированные технологические комплексы. По этой причине структуру ПР, работающего совместно с некоторым технологическим оборудованием (ТО), можно представить так, как это показано на рис. 3.1. 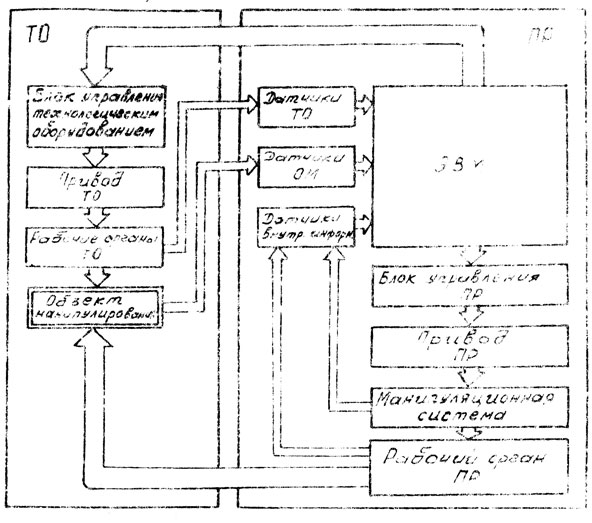 Рис. 3.1 Из рисунка видно, что в общем случае технологическое оборудование состоит из тех же блоков и устройств, что и ПР. Как и ПР оно включает в себя блок управления, привод, рабочие органы, которые подобно рабочему органу ПР взаимодействуют с объектом манипулирования. Технологическое оборудование имеет также СВОЙ датчики, определяющие положение его рабочих органов, т. е. датчики внутренней информации. Более того, исполнительные устройства как ТО, так и ПР управляются ЭВМ. Таким образом, единственное отличие промышленного робота от ТО заключается лишь в том, что он дополнительно содержит антропоморфную исполнительную систему - манипулятор. Очевидно, что характер обслуживаемого ТО существенно влияет на конструкцию и технические характеристики ПР. По этой причине говорят не о ПР вообще, а о роботах-сборщиках (например, для сборки часов), роботах прессового производства, роботах-электромонтажниках, роботах-сварщиках и т. п. Все эти роботы имеют различные кинематические схемы манипуляторов, различные конструкции рабочих органов, различные типы приводов и различные системы управления. Иными словами, универсальность ПР, как перепрограммируемой манипуляционной системы, носит не абсолютный, а относительный характер, поскольку имеет смысл лишь в рамках того оборудования, для обслуживания которого проектируется робот. То же относится к габаритам, весу и внешнему виду ПР. Если ПР ориентирован на работу в той же производственной среде, что и человек, на том же оборудовании и с теми же объектами манипулирования, то антропоморфность будет касаться не только кинематических свойств его исполнительной системы, но и габаритов самого робота. Если же ПР проектируется как элемент безлюдного производства заводов-автоматов, то антропоморфность в его габаритах и внешней форме теряет смысл. |