5. Синтез зубчатого механизма Исходные данные для расчета эпициклического механизма Рис. 4
 Скачать 106 Kb. Скачать 106 Kb.
|

|
2. Схемы механизмов, структура и исходные данные для проектирования 5. Синтез зубчатого механизма 5.1. Исходные данные для расчета эпициклического механизма 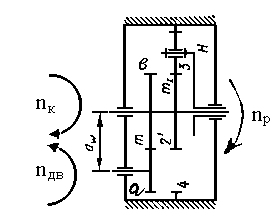 Рис.4 Схема зубчатого механизма Зубчатый механизм с двухступенчатой планетарной и простой передачей:
5.2. Геометрический синтез планетарного механизма В практике машиностроения одной из наиболее важных проблем является выбор рациональной схемы и определения чисел зубьев колес планетарного механизма. Выбор той или иной схемы планетарного механизма производят с учетом необходимого передаточного отношения технологических и конструктивных требований, условий геометрического характера. При проектировании эпициклических механизмов с заданным передаточным отношением возникает задача определения чисел зубьев колес, при следующих условиях:
1. Кинематическое условие – условие соответствия заданному передаточному отношению. Общее передаточное отношение найдем по формуле: iобщ= iред* iав; iав= Zв/ Zа= 20/3 =1.44; iобщ= nдв/ nр=1500/180 = 9.38; iред= iобщ/ iав= 9.38/1.44 =3.84 . 2. Условие соосности – обеспечивает зацепление сателлитов с центральными колесами при расположении осей центральных колес и водила на одной прямой. Подбираем число зубьев планетарного механизма. Передаточное отношение ab: iab=-Zb/Za=-20/13=-1.44. Принимаем число сателлитов, равное 3. Передаточное отношение обращённого механизма: iH13=1/iH31=1/(1-i’3H)=1/(1-3)=-1/2. Принимаем: iH13=-(B*D)/(A*C)=-(1*10)/(5*4)=-1/2, т.е. A=5, B=1, C=4, D=10. Проверяем существование решения: B/(A+B)=1/(5+1)=0,17<=sin(π/3)=0,87>=C/(D-C)=4/(10-4)=0,67=> решение существует. Вычисляем величины: P1=3*(D-C)*A*C=3*6*5*4=360; P2=3*(D-C)*B*C=3*6*1*4=72; P3=3*(A+B)*C2=3*6*42=288; P4=3*(A+B)*C*D=3*6*4*10=720; P5=(1+3n)*(D-C)*(A*C+B*D)=(1+3n)*6*(5*4+1*10)=(1+3n)*180, где n-целое число. Наибольший общий делитель этих чисел: λ=36 при любом n. Определяем числа зубьев колёс в виде: Z1=P1/λ*t=10t; Z2=P2/λ*t=2t; Z2’=P3/λ*t=8t; Z3=P4/λ*t=20t; Выбираем t из условия отсутствия зубьев: Z1>=17, Z2>=17, Z2’>=20, Z3>=85=>t=9. Отсюда: Z1=90, Z2=18, Z2’=72, Z3=180. 3. Условие соседства – обеспечивает совместное размещение нескольких сателлитов по общей окружности так, чтобы они не задевали друг друга своими зубьями, учитывается при числе сателлитов больше двух, при этом увеличение числа сателлитов уменьшает нагрузку на зубья: (Z2+ 2)/( Z1+ Z2)=(18+2)/(90+18)=0,185<= sin(/3)=0,87 >=(Z2’+ 2)/( Z1+ Z2) (72+2)/(90+18)= 0,69. Условие соседства выполняется и полученное решение по габаритам является наиболее оптимальным. Определяем диаметры зубчатых колес: d1= m1* Z1=4*90 = 180 мм; d2= m1* Z2= 4*18 = 36 мм; d2’= m1* Z2’= 4*72 = 144 мм; d3= m1* Z3= 4*180 = 360 мм. Для построения картины скоростей выбираем масштаб: s=0,015 5.3. Графический метод кинематического анализа механизма Составляем в масштабе картину скоростей механизма по найденным диаметрам, отмечаем на ней характерные точки (центры колес) - точки и полюсы их зацепления. Определяю линейную скорость точки А: VA=r1*1; VA=(d3/2)*(nдв/30)=(3,14*0,18*1500)/60= 14.13 м/с. Масштаб построений V=VA/А=14.13/100=0,1413 Приступаем к построению плана частот вращения. Ставим полюс Р и вертикально ставим точку S. Отрезок РS=h=50мм. Через точку S, перпендикулярно к отрезку РS, проводим прямую -. Через точку Р провожу лучи, параллельные тэта-линиям, до пересечения их с прямой -. На этой прямой получаем соответствующие точки. Масштаб плана частот вращения находим по формуле: n=(30V)/(πSh)= 30*0,1413/3,14*0,015*50 = 1.8 5.4. Расчет параметров корригированных зубчатых колес
P = *m; P = 3,14*4= 12.56 мм.
1= 2/Za; 2= 2/Zb; 1= 4*3,14/13 = 1,4; 2= 4*3,14/20 = 0,6.
r1= m Za/2; r2=m Zb/2; r1=4*13/2 =18 мм; r2= 4*20/2 = 44 мм.
rB1= r1cos; rB2= r2cos; rB1= 13*cos20 = 8,46 мм; rB2= 20*cos20= 20.67 мм. 5. Относительное смещение инструментальной рейки при нарезании колес (коэффициент коррекции): χ1= (17 Za)/17; χ2=0; χ1= (1713)/17 = 0.47 . 6.Толщина зуба по делительной окружности: S1= m (/2 2 χ1 tg); S2= m(/22 χ2 tg); S1= 4(3,14/22*0,47*tg20) = 7.65 мм; S2= 4(3,14/22*0*tg20)= 6.28 мм. 7. Межосевое расстояние и угол зацепления: invw=inv20 w= 23; aw= 8. Радиус начальной окружности: rw1= r1*cos/cosw; rw2= r2*cos/cosw; rw1= 13*cos20/cos25= 9.33 мм; rw2= 20*cos20/cos25= 22.81 мм. 9. Радиус окружностей впадин: rf1= 0,5m*(Za2,52 χ1); rf2= 0,5m*(Zb2,52 χ2); rf1= 0,5*4*(132,52*0,47) = 14.88 мм; rf2= 0,5*4*(202,5+2*0) = 39 мм. 10. Радиус окружности вершин: ra1= aw rf20,25m; ra2= aw rf10,25m; ra1= 64.22390,25*4 = 24.22 мм; ra2= 64.2214.880,25*4 = 48.34 мм. 11. Длина активной части линии зацепления: g g 12. Коэффициент перекрытия:` α= g α= 39.25/3,14*4*cos20= 3.33 . 6. Построение эвольвенты Построение ведем в масштабе 6:1. Построение профилей производим в следующем порядке:
7. Список использованной литературы
|