4-8хБочкарва В.Д.1 раздел КП. Анализ типового алгоритма и отработка
 Скачать 0.63 Mb. Скачать 0.63 Mb.
|

|
МИНОБРНАУКИ РОССИИ Федеральное государственное бюджетное образовательное учреждение высшего образования «Ивановский государственный энергетический университет имени В. И. Ленина» Кафедра автоматизации технологических процессов ПОЯСНТЕЛЬНАЯ ЗАПИСКА к курсовому проекту по дисциплине «Технические средства автоматизации на тему: Анализ типового алгоритма и отработка программного модуля на котроллере КР-500 системы регулирования тепловой мощности прямоточного котла по схеме ЦКТИ Утверждена на заседании кафедры АТП Протокол № 2 от 09.10.2019 Проектировал ст. гр. 4-8х ________________ / В.Д.Бочкарёва / Руководил доц. _________________ / А.М. Демин / Оценка: ____________________ Иваново 2020 АННОТАЦИЯ Цель работы изучить особенности работы АСР регулирования тепловой мощности прямоточного котла по схеме ЦКТИ; разработать алгоритмическую и функциональную схема; приобрести навыки работы с контроллером МК-500. - Объем стр. 18 - Таблиц 1 - Рисунков 14 СОДЕРЖАНИЕ 1. АНАЛИЗ ТИПОВОГО АЛГОРИТМА И ОТРАБОТКА ПРОГРАММНОГО МОДУЛЯ НА КОНТРОЛЛЕРЕ КР-500 4 1.1. Общие сведения о КР-500 4 1.2. Описание контроллера 4 1.3. Анализ типового алгоритма и отработка программного модуля на контроллере МК-500 8 1.4. Результаты разработки системы регулирования объекта 10 2. АНАЛИЗ СИСТЕМЫ РЕГУЛИРОВАНИЯ ТЕПЛОВОЙ МОЩНОСТИ ПРЯМОТОЧНОГО КОТЛА ПО СХЕМЕ ЦКТИ 13 2.1. Регулирование тепловой мощности 13 2.2. Формирование сигнала "по теплоте" 15 2.3. Схема ЦКТИ с использованием сигнала "по теплоте". 16 1. АНАЛИЗ ТИПОВОГО АЛГОРИТМА И ОТРАБОТКА ПРОГРАММНОГО МОДУЛЯ НА КОНТРОЛЛЕРЕ КР-5001.1. Общие сведения о КР-500КР-500 – это компактный многоканальный многофункциональный высокопроизводительный микропроцессорный контроллер (в дальнейшем – контроллер), имеющий в своем составе измерительные каналы (ИК), предназначенные для аналого-цифрового преобразования сигналов силы и напряжения постоянного тока, сигналов термоэлектрических преобразователей (ТС), термопреобразователей сопротивления (ТR) и цифро-аналогового преобразования (воспроизведения сигналов силы постоянного тока) в системах автоматического регулирования или логико-программного управления технологическими процессами АСУ ТП, выполнения технологических защит, сбора и обработки информации в различных отраслях промышленности. Контроллер относится к изделиям ГСП. Контроллер позволяет вести локальное, каскадное, дистанционное, ручное регулирование и логико-программное дискретное управление. Контроллер предназначен для построения измерительных, управляющих и информационных систем автоматизации технологических процессов малого и среднего (по числу входов-выходов) уровня сложности и широким динамическим диапазоном изменения технологических параметров, а также построения отдельных подсистем сложных АСУ ТП, обеспечивая при этом оптимальное соотношение производительность/стоимость одного управляющего или информационного канала. Контроллер КР-500 является дальнейшим развитием контроллеров серии КОНТРАСТ, в его состав входят составные части (микроконтроллеры, блоки), заимствованные из предыдущей модели КР-300И. Преемственность контроллеров КР-500 с предыдущими моделями РК-131/300, КР-300 и КР‑300И обеспечена возможностью их подключения к единой контроллерной сети МАГИСТР. 1.2. Описание контроллераКонтроллер КР-500 представляет собой комплекс технических средств. В его состав входят: Блок контроллера БК-500; Модули связи с обьектом (в дальнейшем – модули УСО-Д); Миникотроллер; Микроконтроллеры; Блоки и принадлежности; Программные продукты. Контроллер КР-500 относится к агрегатированным устройствам. Его состав определяется потребителем в зависимости от решаемых задач, перечень технических средств, входящих в состав контроллера. Блок контроллера БК-500 является основной составной частью контроллера и содержит центральный процессор и цифровые каналы связи с устройствами ввода-вывода аналоговых и дискретных сигналов, с другими контроллерами и компьютерами. Центральный процессор принимает информацию о состоянии управляемого объекта, обрабатывает ее и формирует управляющие воздействия в соответствии программой, размещенной в его памяти. Модули УСО-Д осуществляют функции ввода/вывода аналоговых и дискретных сигналов, их обработки и обмена по цифровому каналу с центральным процессором. Модули УСО-Д выполнены в компактных корпусах и могут устанавливаться рядом с блоком БК-500 или на расстоянии до 1,2 км от него (удаленные УСО-Д). Миниконтроллер МК-500 предназначен для построения систем автоматизации технологических процессов малого (по числу входов-выходов) уровня сложности. Микроконтроллеры –специализированные устройства управления оборудованием. Кроме функции ввода/вывода сигналов, они реализуют алгоритмы управления конкретными устройствами или подсистемами (исполнительными механизмами, задвижками, подсистемами удаленных УСО-Д и т.д.), получая обобщенные команды от центрального процессора по резервированным цифровым каналам связи. Перечень блоков и принадлежностей включает преобразователи сигналов, блоки питания, пульт настройки и другие устройства, предназначенные для обеспечения работоспособности и обслуживания контроллера КР-500. В контроллер встроены развитые средства самодиагностики, сигнализации и идентификации неисправностей, в том числе при отказе аппаратуры, выходе сигналов за допустимые границы, сбое в ОЗУ, нарушении обмена по сети и т.п. Для дистанционной передачи информации об отказе предусмотрены специальные дискретные выходы.  Рис. 1.1. Внешний вид контроллера КР-500 на DIN-рейке 1 – блок контроллера БК-500; 2 – модуль питания МП-Д; 3 – микроконтроллер ШМК; 4 – сдвоенный модуль УСО-Д; 5 – одинарный модуль УСО-Д; 6 – клеммы модулей и блоков; 7 – шинные разъемы; 8 – DIN-рейка; Подключаемые устройства: ПИ-3 – преобразователь интерфейса RS-232/RS-485; ПК-302 – пульт настройки; БП – блок питания (БП-Г, БП-4М15; ББП-24); К – компьютер. 1.3. Анализ типового алгоритма и отработка программного модуля на контроллере МК-500 Проанализируем схему технологической программы (рис. 1.2), которую можно разделить условно на две группы. Первая группа соответствует регулятору, и вторая непосредственно объекту управления. СУМ (42) – сумматор. Алгоритм используется для суммирования (без масштабирования) нескольких сигналов. Число дополнительных суммируемых сигналов задается модификатором. При i = 0 на входе имеется сигнал Х0, при i=1 – сигнал Х0 и X1 и т.д. СМА (43) – Суммирование с масштабированием. Алгоритм используется для получения взвешенной суммы. В частности, он применяется вместе с алгоритмами регулирования для построения регуляторов соотношения либо для введения статической коррекции. Число масштабируемых и суммируемых сигналов 2. Не масштабируемый сигнал Хо имеется всегда. ЗАП (39) – Запаздывание. Алгоритм моделирует звено чистого запаздывания и используется для введения динамической коррекции или для моделирования динамических свойств объекта управления. Алгоритм содержит несколько (до 12) ячеек памяти. ФИЛ (35) – Фильтрация. Алгоритм используется для фильтрации высокочастотных помех, а также для динамической коррекции. Фильтр, имеющий порядок выше первого, можно получить путем последовательного включения нескольких алгоритмов ФИЛ. РАН (20) - регулирование аналоговое. Алгоритм используется при построении ПИД-регулятора, имеющего аналоговый выход. Алгоритм, как правило, сочетается с пропорциональным исполнительным механизмом (позиционером) либо используется в качестве ведущего в схеме каскадного регулирования. Помимо формирования ПИД закона в алгоритме вычисляется сигнал рассогласования, этот сигнал фильтруется, вводится зона нечувствительности. Выходной сигнал алгоритма ограничивается. Функциональная схема алгоритма содержит несколько звеньев. Звено, выделяющее сигнал рассогласования, суммирует два входных сигнала, при этом один из сигналов масштабируется, фильтруется и инвертируется. Составим и загрузим схему технологической программы (рис. 1.2). Таблица 1. Передаточные функции
Коэффициент масштабирования Mt=1/10.  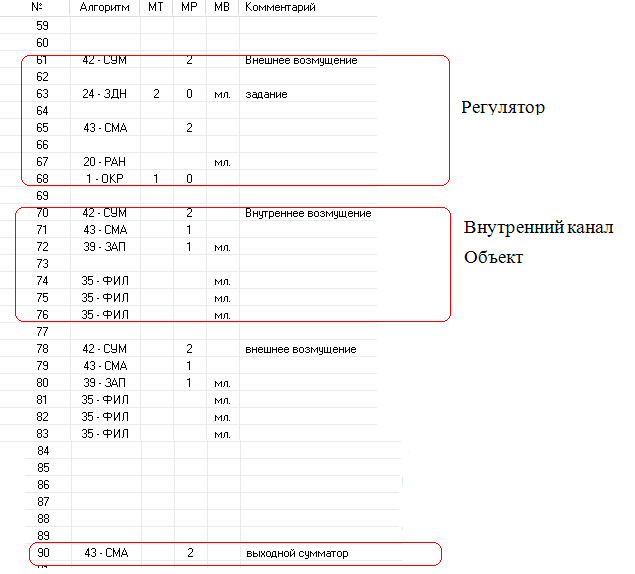 Рис. 1.2. Технологическая программа 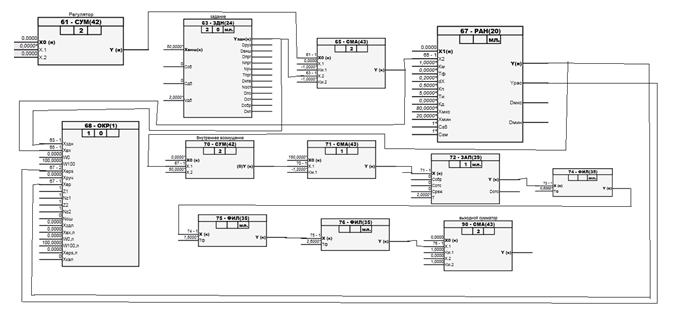 Рис. 1.3. Алгоритмическая схема Передаточная функция внутреннего канала:  Канал регулирования расхода топлива. Выход 61-СУМ(42) Y(к) подключен к входу X0(к) 65-СМА(43); Выход 65-СМА(43) Y(к) подключен к входу Х2 67-РАН(20), а также подключен к входу Хвх 68-ОКР(1); Выход 63- ЗДН(24) Yздн(к) подключен к входу Х2 65-СМА(43), и Хздн 68-ОКР(1); Выход 67-РАН(20) Yрас подключен к входу Хeps 68-ОКР(1), выход Y(к) подключен к входу Хвр 68-ОКР(1), и к входу Х1 70-СУМ(42); Выход 70-СУМ(42) Y(к) подключен к входу Х1 71-СМА(43), который имеет масштабный коэффициент Км=-1,2; Выход 71-СМА(43) Y(к) подключен к входу Х(к) 72-ЗАП(39), который имеет время запаздывания Тз=2с.; Выход 72-ЗАП(39) Y(к) подключен к входу Х(к) 74-ФИЛ(35),Тф=0,8с; Выход 74-ФИЛ(35) Y(к) подключен к входу Х(к) 75-ФИЛ(35),Тф=2,2с; Выход 75-ФИЛ(35) Y(к) подключен к входу Х(к) 76-ФИЛ(35),Тф=3,8с; Выход 76-ФИЛ(35) Y(к) подключен к входу Х1 90-СМА(43). 1.4. Результаты разработки системы регулирования объектаВключение автоматического режима регулятора: 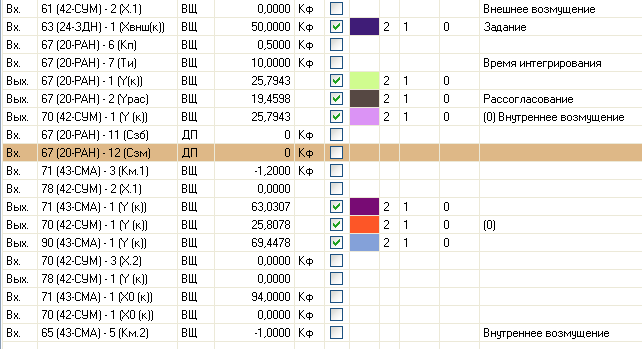 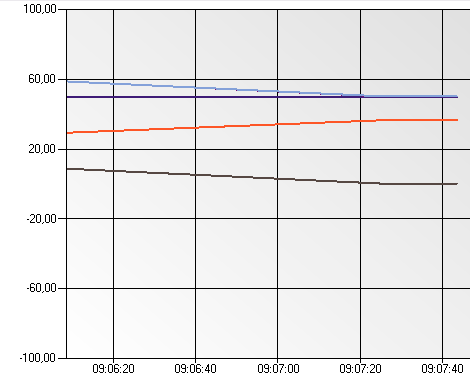 Рис. 1.4. Переключение регулятора в автоматический режим Проверим работоспособность технологической программы с программой переменных. 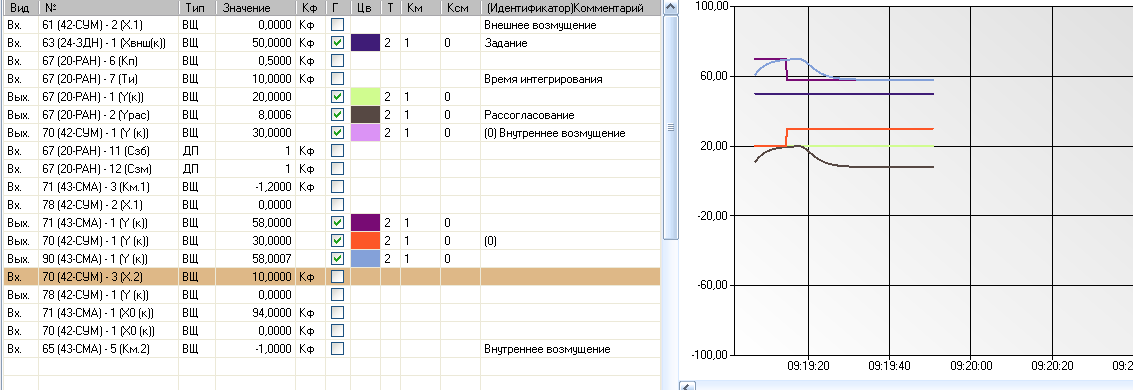 Рис. 1.5. Кривая разгона (+10% на внутренний канал) Перевод регулятора в автоматический режим (снять запреты на “больше” и “меньше” на аналоговом выходе).  Рис. 1.6. Переходная характеристика объекта при подаче возмущения +10% в автоматическом режиме Подача возмущения заданием, можно увидеть реализацию ПИ-закона регулирования. 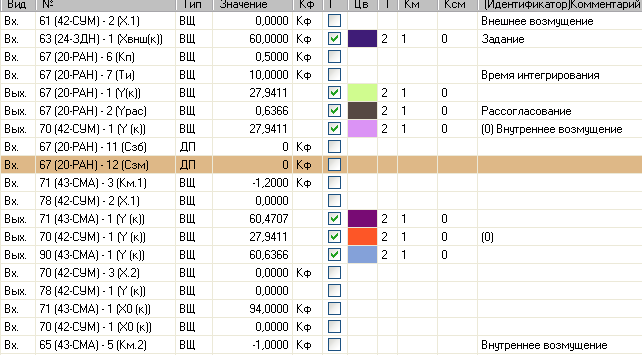 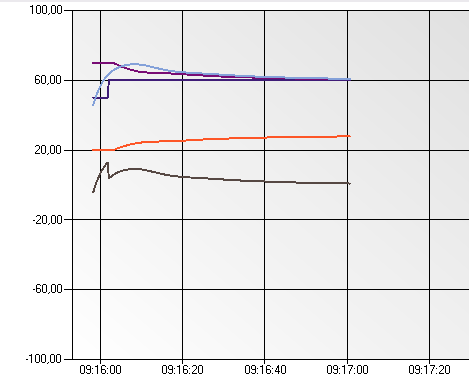 Рис. 1.7. Переходная характеристика объекта при подаче возмущения +20% заданием 2. АНАЛИЗ СИСТЕМЫ РЕГУЛИРОВАНИЯ ТЕПЛОВОЙ МОЩНОСТИ ПРЯМОТОЧНОГО КОТЛА ПО СХЕМЕ ЦКТИ 2.1. Регулирование тепловой мощности Изменение расхода питательной воды в ПК оказывает незначительное инерционное воздействие на изменение расхода, температуры и давления пара на выходе водопарового тракта, который характеризуется устойчивостью и самовыравниванием параметров. Поэтому регулирование тепловой мощности (нагрузки), характеризуемой давлением и расходом пара (при постоянной температуре), осуществляется путем согласованного изменения расходов топлива Вт и питательной воды Dпв. Выбор АСР зависит от инерционности каналов воздействия расходов топлива и питательной воды на тепловую мощность, что определяет последовательность их взаимодействия: расход топлива изменяется в зависимости от изменения расхода питательной воды, который является в схеме ведущим и на него осуществляется воздействие по заданию нагрузки, или наоборот. Соответственно на практике при регулировании тепловой мощности ПК применяют два способа согласования расходов питательной воды и топлива: нагрузка – питательная вода – топливо; нагрузка – топливо – питательная вода. Комбинированный способ с переходом от 1-го к 2-му при исчерпании диапазона работы РПК сложен для реализации и не нашел широкого применения. Кроме этого, структура АСР зависит от состава сигналов, характеризующих процессы тепловыделения и теплообмена и используемых для обеспечения требуемой нагрузки при регулировании температурного режима тракта получения первичного пара: схемы с сигналом "по теплоте" по параметрам, полученным в промежуточном сечении, – это универсальный способ, который не зависит от точности фиксации окончания процесса испарения; схемы с измерением температуры пара в промежуточной точке (в промежуточном сечении) – их применение определяется невозможностью смещения испарительного участка до этого места тракта; схемы с применением сигналов по расходу топлива (эти схемы будут рассмотрены применительно к БК). 2.2. Формирование сигнала "по теплоте"В промежуточном сечении водопарового тракта ПК (оно находится до пакетов пароперегревателя) формируется сигнал "по теплоте" Qпр (назовем его "промежуточная теплота") путем комплексирования трех сигналов, отбираемых и формируемых в этом месте тракта (рис. 2.1):  . .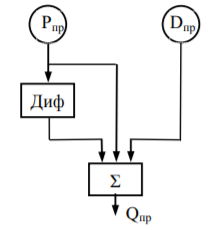 Рис. 2.1 Схема формирования сигнала "по промежуточной теплоте" Рпр – датчик давления пара в промежуточном сечении; Dпр – датчик расхода пара; Диф – дифференциатор; – сумматор. Масштабные коэффициенты определяют соотношение трех суммируемых составляющих. 1) Основной сигнал  – это видимый расход пара в промежуточном сечении. Величина теплоты, аккумулированной в паре, пропорциональна расходу пара. Расход определяется по перепаду давлений на сужающем устройстве и характеризует объемный расход пара. Линеаризация сигнала (корнеизвлечение) обеспечивает пересчет на массовый расход. Однако видимый расход отличается от действительного, т.к. сужающее устройство рассчитано на расчетные значения пара, а при переменном давлении меняется его плотность. – это видимый расход пара в промежуточном сечении. Величина теплоты, аккумулированной в паре, пропорциональна расходу пара. Расход определяется по перепаду давлений на сужающем устройстве и характеризует объемный расход пара. Линеаризация сигнала (корнеизвлечение) обеспечивает пересчет на массовый расход. Однако видимый расход отличается от действительного, т.к. сужающее устройство рассчитано на расчетные значения пара, а при переменном давлении меняется его плотность.Соотношение между значениями массовых расходов определяется корневой зависимостью соотношения плотностей (объемных расходов):  , ,где – видимый расход пара в промежуточном сечении;  – действительный расход пара в промежуточном сечении; – действительный расход пара в промежуточном сечении;  – плотность, принятая при расчете сужающего устройства, на котором осуществляется измерение расхода пара; – плотность, принятая при расчете сужающего устройства, на котором осуществляется измерение расхода пара;  – действительная плотность пара в промежуточном сечении. – действительная плотность пара в промежуточном сечении.2) Сигнал статической коррекции  – это давление пара в промежуточном сечении, которое обеспечивает статическую точность формируемого сигнала – это давление пара в промежуточном сечении, которое обеспечивает статическую точность формируемого сигнала  . Данный сигнал вводится для получения действительного расхода пара путем компенсации влияния на видимый расход отклонения плотности пара от расчетного значения для данного сужающего устройства. . Данный сигнал вводится для получения действительного расхода пара путем компенсации влияния на видимый расход отклонения плотности пара от расчетного значения для данного сужающего устройства. 3) Сигнал динамической коррекции  – это скорость изменения давления – это скорость изменения давления  , которая характеризует процесс аккумуляции теплоты при нарушениях теплового баланса и обеспечивает динамическую точность формируемого сигнала . , которая характеризует процесс аккумуляции теплоты при нарушениях теплового баланса и обеспечивает динамическую точность формируемого сигнала .2.3. Схема ЦКТИ с использованием сигнала "по теплоте".В схеме ВТИ-1 регулятор питания (РП) выполняет функцию ведущего регулятора паропроизводительности, действуя по принципу задание – вода. (рис. 2.2–2.4). Он получает сигнал по расходу питательной воды Dпв и воздействует на РПК, изменяя нагрузку котла в соответствии с сигналом задания от регулятора давления (РД) перегретого пара Рпе перед турбиной. Давление меняется при разбалансе расходов пара, производимого котлом и потребляемого турбиной (нагрузка зависит от работы контура управления электрической мощностью Nэл энергоблока). Регулятор топлива (РТ) работает по соотношению сигналов вода – "промежуточная теплота", воздействуя на расход топлива и приводя его в соответствие с требуемым тепловыделением и процессами теплообмена в тракте получения перегретого пара, поступающего в ЧВД турбины. 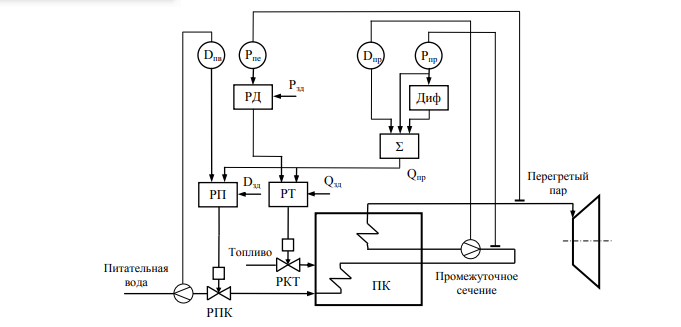 Рис. 2.2 Регулирование тепловой мощности прямоточного котла по схеме ЦКТИ   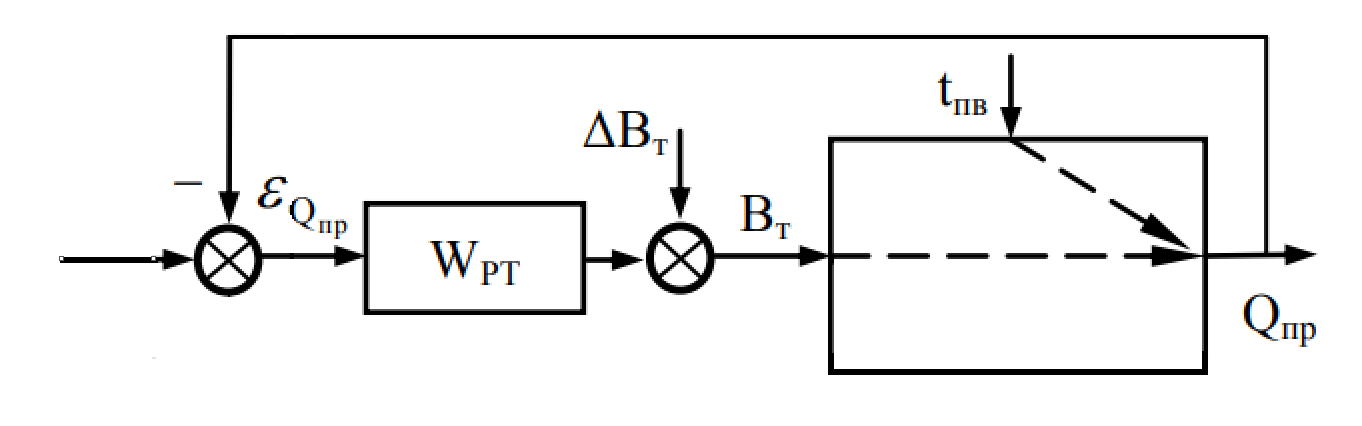 Рис. 2.3 Структурная схема АСР тепловой мощности прямоточного котла по схеме ЦКТИ 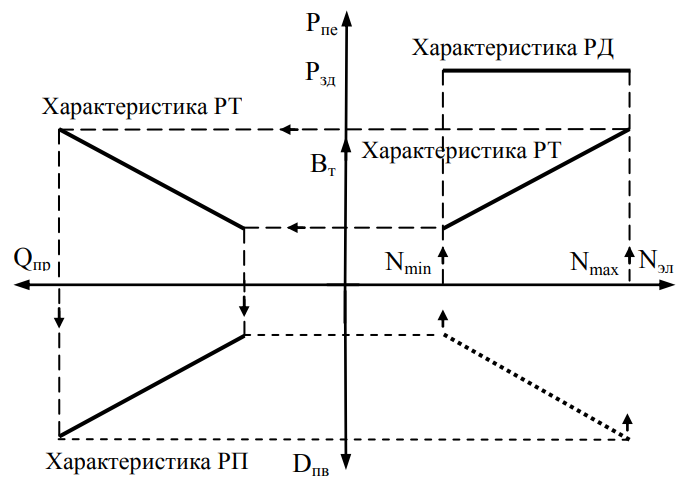 Рис. 2.4 Характеристика способа работы АСР тепловой мощности прямоточного котла по схеме ЦКТИ А регулирование температурного режима (процессов теплообмена) в части водопарового тракта до промежуточного сечения выполняет РП, который воздействует на расход питательной воды по соотношению "промежуточная теплота" – вода. Схема обеспечивает формирование требуемых статических свойств котла (рис. 2.5). 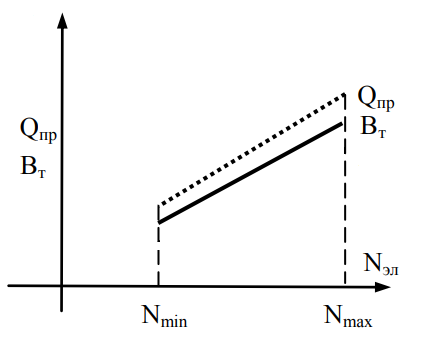 Рис. 2.5 Статическая характеристика АСР тепловой мощности прямоточного котла с сигналом "по промежуточной теплоте" В схеме ВТИ-1 при возмущениях нагрузкой расходы воды и топлива изменяются почти одновременно, т.к. контур по регулированию расхода питательной воды малоинерционный и сигнал об изменении работы РП сразу поступает на РТ. В схеме ЦКТИ при возмущениях нагрузкой изменяется сначала подача топлива, а затем расход воды c некоторым отставанием, определяемым инерцией сигнала по теплоте. Поэтому динамическая точность поддержания значения Qпр при возмущениях нагрузкой схемы ВТИ-1 выше, чем схемы ЦКТИ. При наличии топочных возмущений, которые бывают при сжигании угольной пыли и особенно проявляются при размоле топлива в пылесистемах прямого вдувания, предпочтительнее схема ЦКТИ, т.к. в ней топочные возмущения отрабатываются обоими регуляторами (в схеме ВТИ-1 РП отстает от РТ). Оба варианта несколько сложнее тех, в которых осуществляется непосредственный контроль параметров рабочей среды (измерение расхода топлива и параметров пара), т.к. требуется формирование сигнала по теплоте для регулятора РП или РТ. Требуются идентификационные исследования по оценке инерционности каналов регулирования и их сравнение. Сложнее эти схемы и в настройке.  Рис. 2.6. Переходные процессы при формировании сигнала "по теплоте"  Рис. 2.7. Переходные процессы при использовании схемы формирования сигнала "по теплоте": При возмущении расходом топлива |

