Электрификация и автоматизация участка хвостового хозяйства. ВКР Попов П.Д.. Аннотация (Annotation) Аннотация
 Скачать 0.99 Mb. Скачать 0.99 Mb.
|

2.7 Специальный вопросЕсли асинхронный двигатель, обеспечивающий работу насоса, работает напрямую от сети, то осуществление плавного пуска невозможно, большие пусковые токи приводят к перегрузкам, а это ведёт к его более быстрому износу. Кроме того, такие двигатели плохо регулируются просто понижением напряжения, при этом увеличивается скольжение, вследствие чего уменьшается КПД, растут потери в роторе и рассеивается энергия, в том числе на нагрев. Для такой системы необходимо более сложное регулирование. В зависимости от технических показателей в системе насосного агрегата производится управление скоростью вращения лопастей насоса или двигателя. В современных системах эти показатели регулируются с помощью преобразователей частоты. Асинхронные двигатели наиболее удобны для эксплуатации, поэтому использование преобразователей частоты для них позволяет приблизить КПД электропривода к номинальному значению. Асинхронные двигатели имеют режим плавного пуска, это обеспечивает понижение уровня шума и в данном случае отсутствие гидравлических ударов. Использование описанного метода управления электроприводом и насосом имеет ряд преимуществ. У объектов с большей суточной нагрузкой наиболее высокие показатели энергоэффективности, а также экономии воды и даже тепла. Кроме того, проводить плановые ремонты необходимо реже и увеличивается ресурс оборудования. Если преобразователь частоты подключать к обычному асинхронному двигателю без использования возможности регулировки частоты вращения, то это приведёт к понижению КПД, а, следовательно, увеличению потерь на 56%. Поэтому основная экономия энергии потенциально заложена в повышении функциональности электрического привода, а именно в расширении режимов работы (скорости) привода для достижения наилучших показателей насосных агрегатов и систем. Использование регулируемых асинхронных двигателей позволяет вырабатывать на 25% большую мощность по сравнению с обычными асинхронными двигателями тех же размеров или уменьшить размеры при той же мощности. Работа электропривода насосной системы через преобразователь значительно улучшает качество процессов за счёт регулировки частоты вращения.  Рисунок 2.6. - Схема модели в MatLab&Simulink При управлении скорость вращения насоса с помощью частотно - регулируемого привода при уменьшении нагрузки снижается и расход, и давление жидкости. Это приводит к заметному снижению мощности двигателя, а, следовательно, к экономии электроэнергии. Таким образом, использование частотных преобразователей для регулирования работы насосных систем приводит к значительной экономии электроэнергии (20-60%), воды (до 20%) и расходов на обслуживание электродвигателей и насосных агрегатов. Моделирование проведем в пакете MatLab&Simulink. С помощью подсистемы Subsystem реализована зависимость подачи насоса от угловой скорости насоса. С помощью Subsystem1 реализованы зависимости напора насоса от угловой скорости насоса и статистического напора от расхода жидкости. С помощью подсистемы Subsystem2 реализованы зависимости КПД, активной мощности насоса, потребляемой мощности насосным агрегатом и статистического момента сопротивления насоса от угловой скорости. С помощью модели можно решать различные задачи связанные с режимами регулирования насосной установки, энергопотребления и т.п. параметры стабилизируемого уровня определены сигналом задания, который равен 5В, в соответствии с расчетом изменяя приток жидкости в резервуар фиксируются численные значения параметров. 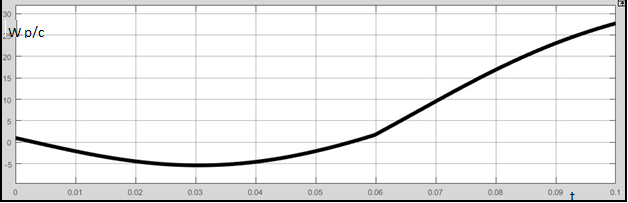 Рисунок 2.7 - Угловая скорость двигателя, рад/с. 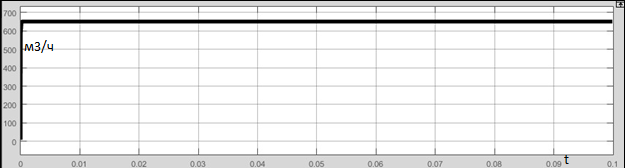 Рисунок 2.8 - Подача насоса, м3/ч. 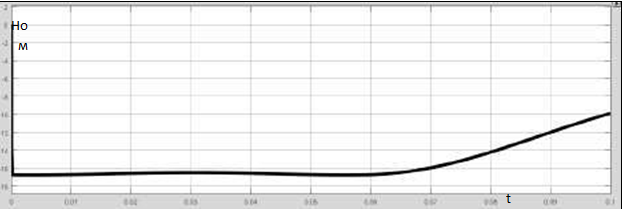 Рисунок 2.9 - Напор насоса,м. 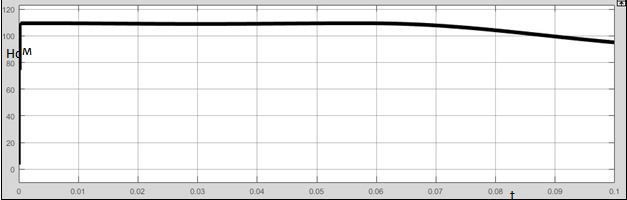 Рисунок 2.10 - Стабилизируемый напор, м. . 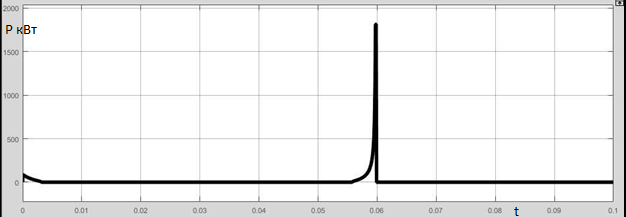 Рисунок 2.11 - Потребляемая мощность насоса, кВт 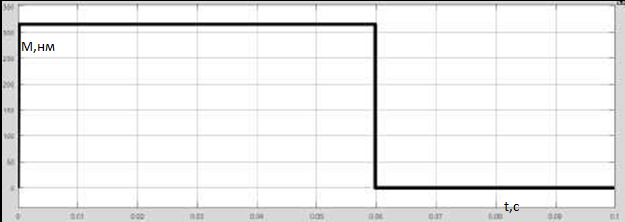 Рисунок 2.12 - Момент статистического сопротивления насоса, Нм. При стабилизации уровня жидкости в резервуаре, потребляемая мощность зависит только от количества притока жидкости. С увеличением притока увеличивается угловая скорость насосного агрегата, напор, развиваемый насосом и потребляемая мощность. С помощью модели можно решить различные задачи связанные с режимами регулирования насосной установки. При стабилизации уровня жидкости на отметке 3 метра, потребляемая мощность зависит только от количества притока жидкости. С увеличением притока увеличивается угловая скорость, напор и потребляемая мощность. Подача насоса строго соответствует притоку жидкости, поэтому потребляемая мощность и затраченная электроэнергия соответствует минимально необходимым величинам. В этом факторе состоит эффект энергосбережения. С помощью модели удобно определять параметры энергоэффективности если известен суточный или месячный график притока жидкости в резервуар. |