Электрификация и автоматизация участка хвостового хозяйства. ВКР Попов П.Д.. Аннотация (Annotation) Аннотация
 Скачать 0.99 Mb. Скачать 0.99 Mb.
|

2.5. Расчет и выбор элементов системы электроприводаПри частотном управлении в соответствии с общепринятыми допущениями, которые обуславливают постоянство сопротивлений схемы замещения при данной частоте, принята Т-образная схема замещения асинхронного двигателя, приведенная на (рис. 3.1). 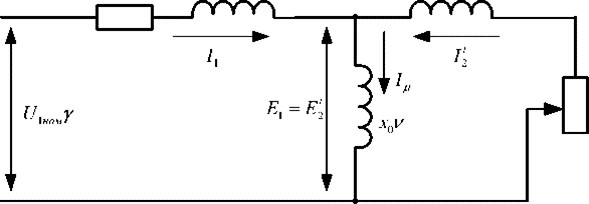 Рисунок 2.3 -Т-образная схема замещения асинхронного двигателя При расчете параметров схемы замещения необходимо обратить внимание на то, что схема замещения приведена для фазы асинхронного двигателя, расчетные значения токов и напряжений являются фазными. Расчет параметров схемы замещения асинхронного двигателя при частотном управлении: Номинальный ток фазы статора   – номинальное фазное – номинальное фазное напряжение статорной цепи. Активное сопротивление фазы статора  где  –номинальное скольжение двигателя; –номинальное скольжение двигателя; - синхронная частота вращения - синхронная частота вращения магнитного поля статора; 𝑓𝑐= 50 Гц - частота тока питающей сети; 𝑝𝑛 - число пар полюсов двигателя. Номинальная угловая скорость магнитного поля статора двигателя  Номинальная угловая скорость вала двигателя  Номинальный момент двигателя  Максимальный момент двигателя 𝑀𝑚𝑎𝑥= 𝜆 ∙ 𝑀ном = 2.2 ∙ 1282 = 2820 Нм Индуктивное сопротивление короткого замыкания  Индуктивные сопротивления статора и приведенное ротора  Приведенное к обмотке статора активное сопротивление фазы ротора  Номинальный приведенный ток ротора  Номинальный коэффициент мощности роторной цепи  тогда  Номинальный ток намагничивающей цепи  Номинальная ЭДС фазыс татора 𝐸1.ном = 𝑈ном.ф ∙ (0,985 − 0,00375 ∙ 𝑝𝑛) = 219.393 ∙ (0,985 − 0,00375 ∙ 2) = 214.457 В Индуктивное сопротивление намагничивающей цепи  Коэффициенты рассеяния обмоток статора и ротора  Общий коэффициент рассеивания 𝜏 = 𝜏1 + 𝜏2 + 𝜏1 ∙𝜏2 = 0,052 + 0,052 + 0,052 ∙ 0,052 = 0,106 Определяются коэффициенты     Частотный преобразователь Частотный преобразователь, или преобразователь частоты - электротехническое устройство (система управления), используемое для контроля скорости и/или момента двигателей переменного тока путем изменения частоты и напряжения питания электродвигателя. Частотный преобразователь - это устройство, используемое для того чтобы обеспечить непрерывное управление процессом. Преобразователи частоты находят все более широкое применение в различных приложениях промышленности и транспорта. Благодаря развитию силовых полупроводниковых элементов, инверторы напряжения и инверторы тока с ШИМ управлением получают все более широкое распространение. Устройства, которые преобразуют постоянный сигнал в переменный, с желаемым напряжением и частотой, называются инверторами. Такое преобразование может быть осуществлено с помощью электронных ключей (BJT, MOSFET, IGBT, MCT, SIT, GTO) и тиристоров в зависимости от задачи. На данный момент основная часть всей производимой электрической энергии в мире используется для работы электрических двигателей. Преобразование электрической мощности в механическую мощность осуществляется с помощью электродвигателей мощностью от меньше ватта до нескольких десятков мегаватт. Современные электроприводы должны отвечать различным требованиям таким как: максимальный КПД; широкий диапазон плавной установки скорости вращения, момента, ускорения, угла и линейного положения; быстрое удаление ошибок при изменении управляющих сигналов и/или помех; максимальное использование мощности двигателя во время сниженного напряжения или тока; надежность, интуитивное управление. Исходя из условий эксплуатации был выбран частотный преобразователь ES025-04-6000F 380В,600А, 315КВТ, производства фирмы ООО «Эффективные системы» г. Москва. Предназначен для приводов с «вентиляторной» механической характеристикой - насосов и вентиляторов. Таблица 2.1 - Параметры преобразователя частоты
1. Статический коэффициент передачи преобразователя частоты   𝑈у.ном = 10 В - номинальное напряжение в соответствии с Государственным Стандартом Приборов (ГСП). 2. Электромагнитная постоянная времени преобразователя может быть принята в пределах Тпч= (0,003 ÷ 0,005) с. Принимается Тпч = 0,005 с. 3. Коэффициент внутренней обратной связи по ЭДС двигателя  4. Коэффициент передачи звена момента  5. Индуктивность рассеяния обмоток статора и ротора  6. Индуктивность намагничивания  7. Полная индуктивность обмоток статора и ротора 𝐿𝑠= 𝐿𝑟= 𝐿𝜇+ 𝐿1 = 𝐿𝜇+ 𝐿`2 = 0,0036 + 0.00015 = 0,00375 Гн. 8. Эквивалентная индуктивность частотно-регулируемого электропривода  где 𝐿др = 0–в связи с отсутствием данных о дросселе в цепи постоянного тока преобразователя частоты;  модуль коммутационной функции. модуль коммутационной функции.9. Эквивалентное активное сопротивление частотно регулируемого электропривода  где rдр = 0 –в связи с отсутствием данных о дросселе в цепи постоянного тока преобразователя частоты. 10. Электромагнитная постоянная времени частотно-регулируемого электропривода  11. Момент инерции насосного агрегата 𝐽Σ = 1.2 ∙ 𝐽дв = 1,2 ∙ 14 = 16,8 кг ∙ м2 2.6.Расчет и построение статических характеристик системы |