Автоматика, телемеханика и связь на железнодорожном транспорте
 Скачать 392.47 Kb. Скачать 392.47 Kb.
|

|
МИНИСТЕРСТВО ТРАНСПОРТА РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ АВТОНОМНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ «РОССИЙСКИЙ УНИВЕРСИТЕТ ТРАНСПОРТА (МИИТ)» (РУТ (МИИТ)
КОНТРОЛЬНАЯ РАБОТА №1 по дисциплине: «Автоматика, телемеханика и связь на железнодорожном транспорте» Выполнил студент 5 курса группы ЗДМ- шифр: Проверил преподаватель: Доцент Неваров П.А. Москва 2020г. Содержание ЗАДАНИЕ 1 Исходныеданные 1.1. Перечень основных маневровых операций, для выполнения которых используется ходовой путь 1.2. Обоснование использования мачтовых и карликовых светофоров 1.3. Определение общего количества стрелок включаемых в централизацию 1.4. Использование изолированных секций маршрута и положение ходовых и охранных стрелок в заданных маршрутах 1.5. Определение зоны выполнения маневров угловыми заездами 1.6. Взаимозависимость показаний входного светофора Н с выходными светофорами четной горловины 1.7. Формирование упорядоченного множества элементов топологического развития станции Однониточный план станции рисунок «з» 2. ЗАДАНИЕ 2 Исходные данные Структурная схема выбранных технических средств Используемая литература ЗАДАНИЕ 1 Исходные данные Заданная участковая станция расположена на двухпутной линии железной дороги, обеспечивает смену локомотивов и локомотивных бригад, выполняет поездную работу в объеме, превышающем 70 пар поездов в сутки, имеет не менее двух маневровых тепловозов в своем локомотивном хозяйстве - Л. Х. (депо, ремонтная база, экипировочные устройства) и осуществляет маневровыми локомотивами как маршрутизированные маневры (перестановку вагонов с одного пути приемо-отправочного парка на другой, подачу подвижных единиц на пути грузового двора, сортировочного парка и т.п.), так и не маршрутизированные - на 4-х путях сортировочного парка с использованием вытяжных путей при расформировании и формировании составов сборных и участковых поездов. Перегонные пути оборудованы устройствами двухпутной автоблокировки (АБ) с числовым кодированием информации и автоматической локомотивной сигнализацией (АЛСН) непрерывного действия. Для заданного в таблице 1 варианта схемы путевого развития участковой станции составить однониточный план станции с осигнализованием. Вариант схемы станции выбирается по сумме двух последних цифр учебного шифра в соответствии с таблицей 1. Таблица 1  Четная (нечётная) предпоследняя цифра учебного шифра студента определяет соответственно четный (нечётный) маршрут приёма в табл. 1 (0 – считается чётной цифрой). 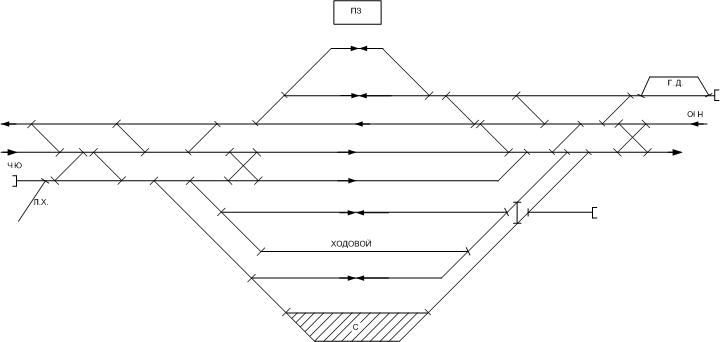 При выполнении задания 1 необходимо дать краткие ответы и пояснения по следующим вопросам. 1. Для заданного варианта участковой станции объяснить основные маневровые операции, для выполнения которых используется ходовой путь. 2. Обосновать использование в конкретных местах путевого развития мачтовых и карликовых светофоров, записать общее количество тех и других. Суммарное их количество и раздельно по назначению (поездных; маневровых; поездных, совмещенных с маневровыми светофоров) заносится непосредственно на лист однониточного плана станции. 3. Определяется общее количество включаемых в централизацию стрелок, в том числе имеющих двойное управление (с центрального поста ЭЦ и с маневровой колонки) с кратким обоснованием необходимости иметь двойное управление стрелок, примыкающих к путям сортировочного парка. На листе однониточного плана станции заполняется ведомость стрелочных переводов. 4. Для одного (заданного) маршрута приема (см. табл.2.1) определяется количество изолированных секций и положение стрелок, входящих в этот маршрут. Результаты заносятся в табл.2. 5. Определяются зоны выполнения маневров угловыми заездами. Дается обоснование мест установки маневровых светофоров, которые обеспечивают маневры угловыми заездами, а также маневровых светофоров, ограничивающих опасные перепробеги подвижного состава в полурейсе вытягивания вагонов с путей при маневре угловым заездом. В целях сокращения объема пояснительной записки достаточно рассмотреть по 2-3 угловых заезда в каждой горловине станций. 6. Для заданной горловины станции указываются все сигнальные показания входного светофора в увязке с показаниями выходных светофоров другой горловины. Для каждого сигнального показания входного светофора в маршрутах приема на боковой путь показать величину допустимой скорости входа поезда на станцию. Например, рядом с сигнальным показанием “два желтых и зеленая полоса” указать Vвх 80 км/ч. . Взаимную увязку сигнальных показаний входного и выходного светофора оформить в виде табл. 3. 7. Для заданного поездного маршрута сформировать упорядоченное множество элементов топологического развития станции, образующих данный маршрут. 1.1. Перечень основных маневровых операций, для выполнения которых используется ходовой путь Ходовой путь предназначен для подачи экипированных локомотивов из депо и уборки локомотивов от прибывших (при смене локомотива) или расформированных составов, а также для передачи из одной горловины станции в другую маневровых локомотивов при производстве маневров. 1.2. Обоснование использования мачтовых и карликовых светофоров На участковой станции используют мачтовые и карликовые светофоры. Мачтовые обеспечивают лучшую видимость сигнальных показаний, однако, они дороже и требуют для своей установки большей ширины междупутья, чем карликовые. Для установки мачтового светофора необходимо иметь ширину между осями путей 5200мм, а для карликового светофора - 4460 мм. При марке крестовины 1/9 (радиус кривой 200м) и ширине междупутья 5,2м по условиям габарита С карликовый выходной трехлинзовый (трехзначный) светофор может быть установлен на расстоянии 58 м от начала остряка первой за светофором выходной стрелки, тогда как использование в аналогичных условиях мачтового трехзначного светофора потребует расстояния 72 м от начал остряка стрелки, перед которой его устанавливают, следовательно, приемоотправочный путь при установке в междупутье мачтового светофора вместо карликового укорачивается на14 м. По экономическим соображениям стремятся к максимальной полезной длине приемоотправочных путей. Поэтому там, где это допустимо по условиям безопасности движения, устанавливают в междупутье карликовые светофоры. Не допускается установка карликовых светофоров в качестве входных, а также выходных, с путей по которым осуществляется безостановочный пропуск поездов. На всех выходных светофорах используется сигнализация "один желтый мигающий и один лунно-белый" огни для отправления поезда на неправильный путь перегона. Мачтовыми определены входные основные светофоры Ч, Н, и входные дополнительные НД и ЧД, выходные светофоры с главных путей ЧII, HI, выходные светофоры с боковых путей по которым обеспечивается безостановочный пропуск Ч4, групповые выходные светофоры ЧС 9-11 и НС 9-11, а также светофоры, ограждающие выходы из депо (М2), грузового двора (М5) и вытяжного пути М7П с целью обеспечения наилучшей видимости. Остальные путевые светофоры в поездных и маневровых маршрутах предусматриваются карликовыми по экономическим соображениям. Дополнительные входные светофоры ЧД, НД имеют только три сигнальных показания: — красный огонь - запрещает вход на станцию; —пригласительный огонь. —два желтых огня сигнализируют о возможности входа на станцию со сниженной скоростью независимо от характера маршрута приема, заданного для входа поезда на станцию с неправильного пути двухпутного перегона, по которому организуется постоянное двухстороннее движение. Дополнительные входные светофоры имеют мачтовую конструкцию (перегоны оборудованы автоблокировкой и АЛСН в правильном направлении и по сигналам АЛСН в неправильном направлении) и устанавливаются на ординате границы станции с левой стороны пути, поскольку не на всех станциях междупутья имеют достаточную ширину, позволяющую разместить там без нарушения габарита «С». 1.3. Определение общего количества стрелок включаемых в централизацию. В электрическую централизацию (ЭЦ) включаются все стрелки станции, которые определяют конфигурацию централизованных маршрутизированных передвижений поданной станции. Стрелки в маневровых районах, на грузовых дворах, в сортировочных парках, где движение подвижного состава происходит только маршрутизированным способом по неконтролируемым путям, могут иметь местное (ручное или электрическое) управление. В составе заданной участковой станции стрелок, включаемых в ЭЦ: -49 шт.; в том числе с двойным управлением - 4шт. В состав заданной участковой станции входит сортировочный парк, состоящий из путей 9,10,11. В четной и нечетной горловине к нему примыкают соответственно стрелки 24,26,19,21. Для ускорения расформирования, сортировки и составления поездов возникает необходимость использования немаршрутизированных маневровых передвижений, сопровождаемых переводом стрелок в присутствии составителя без участия ДСП. Это определяет необходимость использования местного управления вышеуказанными стрелками с маневровой колонки. При малом объеме маневровых работ установку маневровых маршрутов осуществляет ДСП. Тогда для обеспечения безопасности движения, примыкающие стрелки должны иметь центральное управление. Таким образом, стрелки примыкающие к сортировочному парку должны иметь двойное управление - местное и центральное. Условное графическое обозначение стрелок, управляемых только с пульта ЭЦ (стрелки 5, 7, 9, 11), отличается от обозначения стрелок, которые имеют два вида управления (стрелки 24,26,19,21.), в свою очередь охранные стрелки переводятся на всё время производства местной работы в охранное положение стрелка 15 в (-) , стрелка 17/19 в (+) положение, стрелка 20 соответственно в (+)положение и будет ограждаться синим огнём светофора М12 . - центральное с пульта, установленного на посту ЭЦ, для организации ДСП маневровых и поездных маршрутов; - местное управление с маневровой колонки МК1 или МК2, установленной вблизи соответствующих стрелок Маневровая колонка используется в следующих случаях: — продолжительность непрерывной работы не превышает 1,5ч, а полной за смену - 2,5ч; — по местным условиям невозможно установить маневровый пост или маневровую вышку; — в районе нет постоянного дежурного агента и стрелки переводит составитель. 1.4. Определение изолированных секций маршрута и положение ходовых и охранных стрелок в заданном маршруте. Для заданного маршрута приема определено количество изолированных секций и положения стрелок, входящих в этот маршрут, результаты оформлены в таблице 2.  1.5. Определение зоны выполнения маневров угловыми заездами. Расстановка маневровых светофоров производится исходя из технологического процесса работы данного района станции, интенсивности маневровых передвижений и должна обеспечивать минимальную длину заездов маневрирующего состава при перестановке с пути на путь и возможность ведения нескольких одновременных маневровых передвижений в одном районе станции. Перестановку маневровым локомотивом вагонов с одного пути на другой для четной группы путей с минимальными пробегами в угловых заездах обеспечивает светофор М10, М18 в четной горловине, в нечетной М11. В большинстве случаев ДСП приходится прибегать к немаршрутизированным передвижениям «от стыка» или «до стыка» для исключения перепробегов при этом часть функций ЭЦ он возлагает на себя, но как правило безопасность движения при этом не нарушается. 1.6. Взаимозависимость показаний входного светофора с выходными светофорами. Таблица№3  1.7. Формирование упорядоченного множества элементов топологического развития станции. Для выполнения п. 7 задания представляю маршрут приема нечетного поезда П1 на главный путь IП в условиях использования путевого развития заданной станции в виде упорядоченного множества элементов топологического развития станции. Представляю всю совокупность элементов топологического развития станции в виде формального конечного множества А = (а1, а2, … аn), включающего в себя 6 подмножеств: Aсв светофоров, Aст стрелок, Aсе изолированных участков (бесстрелочных участков и стрелочно-путевых секций), Aпоп приемоотправочных путей, Aупу участков приближения и удаления, Aвп внутристанционных переездов т. е.  В свою очередь каждое из выделенных подмножеств может подвергаться дальнейшему делению на подмножества. Например, подмножество топологических элементов типа «стрелка» можно разделить на несколько непересекающихся подмножеств стрелок с марками крестовины 1/9, 1/11, и т.д  Кроме того, множество Aст может быть разделено на подмножества стрелок по функциональному назначению: сбрасывающие, ограждающие, спаренные и т.д.  Для остальных элементов топологического развития станции можно записать аналогичные множества подтипов. Каждому поездному или маневровому маршруту mj из множества маршрутов  может быть поставлено в соответствие подмножество  элементов топологического плана станции  То есть каждый маршрут в любой системе централизации (электрической или микропроцессорной) представляет собой последовательность топологических элементов станции  В свою очередь реализацию маршрута можно представить в виде совокупности технологических операций, выполняемых объектами (перевод стрелки, смена показаний огней светофора, занятие или освобождения участка пути) и логических условий, задаваемых режим работы реальных объектов в зависимости от топологии маршрута движения и состояния других элементов, взаимосвязанных с данным элементом. В свою очередь реализацию маршрута можно представить в виде совокупности технологических операций, выполняемых объектами (перевод стрелки, смена показаний огней светофора, занятие или освобождения участка пути) и логических условий, задаваемых режим работы реальных объектов в зависимости от топологии маршрута движения и состояния других элементов, взаимосвязанных с данным элементом. Начальным элементом любого маршрута mj светофор, по есть элемент аj из множества светофоров Aсв. Остальные элементы, образующие маршрут, перечисляются в строгой последовательности, по мере следования по маршруту. При этом стрелочно-путевые секции (СП), входящие в данный маршрут, следует указывать при проследовании точки, называемой центром стрелочно-путевой секции. Центр стрелочно-путевой секции – это точка пересечения всех возможных маршрутов через данную секцию при плюсовом и минусовом положениях стрелок. Выполнение указанного правила обеспечивает контроль свободности секции во всех маршрутах с ее участием. Перечисляю элементы топологического плана станции, образующего маршрут приема нечетного поезда П1 на боковой обезличенный путь 3П в условиях использования путевого развития заданной станции. Результат представляю в виде таблицы 4. Таблица 4
Таким образом, рассмотренный маршрут содержит 16 элементов топологического развития станции. Задание №2 Исходные данные Участок имеет одностороннюю сортировочную систему с продольным размещением парков. Необходимо выбрать вариант механизации и автоматизации сортировочной горки, на основе которого составить структурную схему выбранных технических средств. Исходные данные к заданию 2
Сортировочные горки относятся к основным сортировочным устройствам, предназначенным для переработки вагонопотоков и имеющим путевое развитие и техническое оснащение, включающее технологическое оборудование и средства автоматики. В зависимости от объема переработки и числа путей в сортировочном парке различают горки повышенной (ГПМ), большой (ГБМ), средней (ГСР) и малой (ГММ) мощности. ГПМ - горка, предназначенная для переработки в режиме параллельного и последовательного роспуска более 5500 вагонов в среднем в сутки или имеющая свыше 40 подгорочных путей. К числу проектируемых на сортировочных горках технических средств механизации и автоматизации отдельных технологических процессов или операций относятся: -средства механизации исполнительных процессов: установки маршрутов (стрелочные переводы) и регулирования скорости скатывания отцепов (замедлители, вагоноосаживатели, тормозные башмаки); -средства механизации закрепления (заграждения) вагонов и составов в сортировочном парке; -оперативно-диспетчерское оборудование (горочные пульты управления и средства оперативно-технологической связи); -системы и устройства автоматизированного управления горочными процессами; -устройства световой и звуковой сигнализации. Выбор тех или иных средств механизации горочных операций и автоматизации управления зависит от типа и мощности проектируемого сортировочного устройства, а также от характера технологических операций, подлежащих автоматизированному управлению. I ТП - первая (горочная) тормозная позиция, состоящая из двух вагонных замедлителей типа КВ-3, КНП-5 или ВЗПГ-5, устанавливаемых на спускной части горки до или после первой (головной) разделительной стрелки по маршруту скатывания отцепов. II ТП - вторая (пучковая) тормозная позиция, состоящая из двух замедлителей указанных выше типов, устанавливаемых на спускной части горки перед первой разделительной стрелкой пучка путей. III ТП - третья (парковая) тормозная позиция, расположенная в начале сортировочных путей и состоящая из трех замедлителей типа РНЗ-2М или одного замедлителя типа КНП-5. ВО - вагоноосаживатели, располагаемые на сортировочных путях и предназначаемые для принудительного механического перемещения вагонов по путям сортировочного парка в направлении скатывания вагонов. ЗУ - заграждающие устройства, устанавливаемые на сортировочных путях и предназначаемые для предотвращения выхода вагонов за пределы сортировочного парка. Применение вагоноосаживателей ограничивает максимально-допустимую скорость роспуска составов, но при этом обеспечивает высокое качество расформирования за счет исключения повреждения вагонов и грузов и сокращения объема маневровой работы по устранению "окон" между вагонами в сортировочном парке. Однако применение вагоноосаживателей целесообразно только в малоснежных районах, в связи с чем они нашли широкое применение лишь на железных дорогах ряда западных стран, таких как Германия, Франция и Италия. Процесс расформирования каждого состава состоит из ряда последовательных горочных операций, включающих в себя надвиг состава нагорку, роспуск состава и направление скатывающихся отцепов на сортировочные пути в соответствии с их назначением. Надвиг состава на горку осуществляется по командам дежурного по станции (ДСП) маневровым локомотивом вагонами вперед. Машинист при надвиге состава должен руководствоваться показаниями напольных светофоров, установленных по маршруту надвига: выходного с пути парка приема, горочного светофора, расположенного на вершине горки, и повторителя (при его наличии) горочного светофора. Так как надвиг состава осуществляется вагонами вперед, то с целью обеспечения безопасности движения и ускорения надвига на горках средней и выше мощности рекомендуется применение быстродействующей горочной автоматической локомотивной сигнализации ГАЛС, которая осуществляет передачу показаний напольных горочных светофоров по маршруту надвига в кабину машиниста маневрового локомотива. При вступлении состава на последний бесстрелочный изолированный участок перед горочным светофором на локомотивном индикаторе высвечивается признак окончания надвига - начало роспуска состава в виде буквенного символа или в виде цифрового значения начальной скорости роспуска. В настоящее время на сети железных дорог применяют частотные системы ГАЛС с использованием рельсовых цепей в качестве канала связи (ГАЛС-РЦ) и радиоканала (ГАЛС-Р). Роспуск состава представляет собой процесс разделения состава на отцепы (отцепление группы вагонов одного назначения) в процессе движения состава через горб горки. В зависимости от длины (числа вагонов) и ходовых свойств смежных отцепов с учетом протяженности пути их совместного пробега на спускной части горки до разделяющей их маршруты стрелки скорость состава при его роспуске целесообразно изменять с тем, чтобы обеспечить более высокий темп расформирования без последующего нагона отцепами друг друга на разделяющих их маршруты стрелках. Такой режим роспуска называют режимом роспуска с переменной скоростью. В условиях повышенной загрузки дежурного по горке (ДСПГ) распорядительными и исполнительными функциями по обеспечению надлежащего качества расформирования состава ему сложно в ограниченное время правильно оценить требуемую скорость роспуска, что зачастую приводит к ее преднамеренному снижению или неоправданному повышению и, как следствие в последнем случае, к нагону. С целью ускорения процесса роспуска составов и исключения при этом нагонов отцепов на горках средней и выше мощности рекомендуется применение устройств автоматического задания скорости роспуска (АЗСР), которые осуществляют расчет (предварительный или в реальном масштабе времени) требуемой скорости состава с тем, чтобы обеспечить нужную начальную скорость скатывания очередной группы вагонов на момент отделения ее от состава и последующего самостоятельного скатывания в виде одного отцепа . Устройства АЗСР автоматически управляют показаниями горочного светофора, которые с помощью ГАЛС передаются на локомотив и отображаются на локомотивном светофоре в виде горения соответствующего огня и одновременно на цифровом индикаторе в виде заданного значения скорости состава. Устройство АЗСР является составной частью подсистемы автоматизированного управления скоростью роспуска состава, в которую входят устройства ГАЛС, дополненные бортовым авторегулятором скорости тепловоза (УБА РСТ) для автоматической (без участия машиниста) отработки заданной скорости роспуска. Совокупность устройств ГАЛС и УБА РСТ представляют собой систему телеуправления горочным локомотивом (ТГЛ). Вычисление скорости роспуска требует наличия информации о характеристиках отцепов (числе вагонов, весе и маршруте отцепов), поэтому подсистема автоматизированного управления скоростью роспуска состава должна предусматривать связь ее с информационно-планирующей системой 1 АСУ СС, которая содержит полную информацию о всех вагонах в составе и может по запросу оператора - технолога или ДСПГ автоматически выдавать ее в требуемом объеме в устройства АЗСР. Для удобства работы составителей поездов, осуществляющих вручную с помощью специальных приспособлений расцепление вагонов в зоне вершины горки, на мачтах горочных светофоров или отдельных мачтах устанавливают цифровые указатели числа вагонов в каждой группе вагонов, подлежащих расцепке. Число отображаемых групп вагонов не превышает трех. Управление указателями производится системой АЗСР в моменты отделения отцепов от состава. С этой целью в состав системы вводятся устройства фиксации момента отрыва отцепов (ФМО), которые осуществляют измерение скорости надвига состава Vн и скорости скатывания Vс очередного отделившегося от состава отцепа. Момент отрыва отцепа фиксируется, когда скорость Vc превышает скорость Vн на определенную величину (0,5-1 км/ч). После отрыва от состава отцепы под действием собственного веса скатываются по наклонной плоскости (спускной части) горки на соответствующий сортировочный путь, маршрут скатывания до которого устанавливается путем последовательного автоматического перевода впередилежащих стрелок, осуществляемого системой горочной автоматической централизации (ГАЦ). Ввод маршрутов скатывания отцепов в систему ГАЦ может осуществляться ДСПГ с пульта в ручном или программном режимах, или автоматически от внешних устройств. В ручном режиме маршрут вводится поотцепно, синхронно с роспуском; в программном - путем предварительного набора маршрутов для группы отцепов. Автоматический режим ввода маршрутов синхронно с роспуском используется для ускорения процесса задания маршрутов в ГАЦ без участия ДСПГ и может осуществляться с помощью системы АЗСР или специализированных горочных программно-задающих устройств ГПЗУ которые каналами связи соединены с АСУ СС для приема из нее программы роспуска состава (порядковый номер, число вагонов и путь назначения отцепов) и с ГАЦ для поотцепного ввода маршрутов (путей назначения ) отцепов. Современные устройства ГПЗУ выполнены на базе применения микропроцессорной техники с использованием в качестве визуальных средств отображения информации цветных графических мониторов и наряду с основной функцией ввода маршрутов в ГАЦ реализуют дополнительно все функции АЗСР. Системы ГАЦ имеют собственный накопитель информации для оперативного хранения от 5 до 11 маршрутов отцепов. Очередной маршрут в накопитель информации вводится после фиксации отделения отцепа от состава и освобождения одним из предыдущих отцепов головной стрелки на спускной части горки, в результате которого осуществляется последовательный сдвиг информации в накопителе и освобождение одной ячейки памяти для записи следующего вводимого маршрута. При надвиге вагонов может иметь место нерасцеп или дробление отцепов, которые требуют вмешательства персонала горки с целью оперативной корректировки программы роспуска, поэтому на спускной части горки перед головной стрелкой оборудуется участок контроля расцепа посредством установки на пути комплекта путевых датчиков, позволяющих осуществить контроль правильности расцепления вагонов. Устройства контроля расцепа УКР различаются применяемыми техническими средствами и могут входить в состав любой из систем: АЗСР, ГАЦ или ГПЗУ. В ряде применений они известны как устройства комплексного контроля головной зоны УКГЗ. Для выполнения функций контроля роспуска необходима информация о числе вагонов в отцепах состава, которая может быть введена непосредственно из ГАЦ (при ее наличии), АЗСР или ГПЗУ. Процедура определения фактического числа вагонов в отцепе устройством УКГЗ сводится к следующим операциям: 1) путем счета осей, вошедших на участок контроля расцепа (КР), длина которого меньше базы вагона, определяется число осей в первой тележке каждого вагона; 2) по прохождению требуемого числа осей второй тележки вагона фиксируется проход одного вагона по участку КР; 3) непрерывно ведется подсчет числа вагонов, прошедших по участку КР с момента занятия до полного его фактического освобождения. В случае несовпадения заданного программой роспуска и измеренного на участке КР фактического числа вагонов в отцепе на горочный пульт управления или экран монитора выдается информация о неправильном расцепе. В зависимости от типа применяемых систем горочной автоматики корректировка программы роспуска может производиться оператором горки или автоматически. При нерасцепе двух отцепов, если не предусматривается остановка роспуска и осаживание состава назад с последующим повторным роспуском, требуется изъятие из программы роспуска маршрута второго отцепа в сцепе ("продвижка" программы). В случае дробления отцепа на две части требуется повторить в программе маршрут данного отцепа для его второй части ("задержка" программы). В системе ГАЦ маршрут отцепа в виде кода номера сортировочного пути транслируется из одной ячейки памяти к другой по мере скатывания отцепа от одной стрелки к другой. При вступлении отцепа на очередную стрелку его маршрут передается в ячейку памяти (оперативный накопитель информации), относящуюся к следующей стрелке, и записывается в нее при условии, что следующая стрелка свободна. Если положение стрелки не соответствует маршруту, информация о котором содержится в ее ячейке памяти, то устройства ГАЦ автоматически переводят стрелку в соответствующее положение. По своим ходовым качествам различают отцепы с низким сопротивлением движению (очень хорошие бегуны - ОХБ) и с высоким сопротивлением движению (очень плохие бегуны - ОПБ). При совместном друг за другом скатывании с горки ОХБ могут догнать ОПБ ранее, чем последние освободят стрелку, разделяющую их маршруты, т.е. произойдет так называемый "нагон" отцепов, что считается технологическим браком в работе сортировочной системы. Чтобы исключить нагоны отцепов с разными ходовыми свойствами применяют автоматическое интервальное регулирование скорости скатывания отцепов на первой и второй тормозных позициях с помощью вагонных замедлителей. Функции интервального регулирования на автоматизированных горках выполняют автоматические устройства управления тормозными позициями, входящие в состав подсистемы автоматического регулирования скорости отцепов в процессе скатывания с горки (подсистема АРС). При интервальном регулировании скорости отцепа на тормозной позиции учитываются следующие факторы: местоположение позади- и впередиидущего отцепов, их ходовые свойства, скорость движения и маршруты следования; длина, ходовые свойства и маршрут следования регулируемого отцепа. В зависимости от сложившейся интервальной ситуации подсистема АРС корректирует скорость выхода регулируемого отцепа из тормозной позиции: ниже заданного значения прицельной скорости выхода (притормаживание отцепа); выше заданного значения прицельной скорости выхода (ускорение выхода отцепа из тормозной позиции); сохранение прицельной скорости выхода при интенсивном торможении в конце тормозной позиции (минимальное время хода по тормозной позиции); сохранение прицельной скорости выхода при интенсивном торможении в начале тормозной позиции (максимальное время хода по тормозной позиции); сохранение прицельной скорости выхода при минимальной интенсивности торможения (среднее время хода по тормозной позиции). Под прицельной скоростью выхода отцепа из тормозной позиции следует понимать требуемое значение скорости выхода, исходя из условий скатывания только одного данного отцепа без учета наличия впереди и сзади смежных отцепов. Чем выше ходовые свойства отцепа, тем больший избыток его кинетической энергии следует погасить посредством тормозных средств с тем, чтобы доставить его в нужную точку сортировочного пути со скоростью, не превышающей максимально-допустимую, исходя из особенностей его груза и типа вагонов. В то же время, для очень плохих бегунов в наихудших условиях скатывания (мороз в совокупности с сильным встречным ветром) торможение отцепов для обеспечения их прицельной скорости выхода практически не требуется. Процесс погашения избыточной энергии отцепа на тормозных позициях называется прицельным торможением или прицельным регулированием скорости скатывания отцепов. При прицельном регулировании учитываются следующие факторы: -маршрут следования отцепа; -ходовые свойства отцепа; -допустимые скорости входа отцепа в замедлители тормозной позиции; местоположение на сортировочном пути последнего стоящего вагона, другими словами, длина свободной от вагонов части сортировочного пути за парковой тормозной позицией; значение максимально-допустимой скорости соударения отцепа с вагонами на подгорочных путях. Таким образом, управление тормозными позициями включает в себя интервальное и прицельной регулирование скорости скатывания отцепов. Интервальное регулирование скорости скатывания отцепов осуществляется на первой и второй тормозных позициях, прицельное регулирование - на второй и третьей (парковой) тормозных позициях. Поэтому I ТП называют интервальной , II ТП - интервально-прицельной, а III ТП - прицельной тормозными позициями. Функции системы АРС сводятся к расчету прицельных скоростей выхода отцепа из каждой тормозной позиции и вводу их значений для реализации в устройства управления тормозными позициями, которые автоматически отрабатывают заданные значения путем использования различных ступеней торможения (усилий нажатия тормозных балок замедлителей на колеса вагонов). Устройства управления тормозными позициями осуществляют непрерывно измерение фактической скорости отцепа и сравнение ее с заданной скоростью, и при достижении их равенства производят автоматическое оттормаживание вагонных замедлителей. Для определения прицельной скорости выхода отцепа необходимо знать длину свободной части сортировочных путей. С этой целью в подгорочном парке на длине 350-450 м за парковой тормозной позицией устанавливаются путевые устройства системы контроля заполнения сортировочных путей (КЗП). Наиболее распространенные на сети отечественных железных дорог системы (КЗП-ВНИИЖТ и КЗП-ГТСС) предусматривают оборудование сортировочных путей бесстыковыми электрическими рельсовыми цепями тональной частоты (1000 или 800 Гц) с потенциальным (КЗП-ВНИИЖТ) или токовым (КЗП-ГТСС) съемом информации. В зоне действия систем КЗП каждый сортировочный путь разбивается на ряд элементарных контрольных участков длиной 25-30 м, свободность которых контролируется по наличию или отсутствию сигнального тока в рельсах. По числу свободных контрольных участков при известной их длине система КЗП вычисляет общую длину свободной части сортировочного пути, информация о которой передается в систему АРС. Для фиксации нарушений программы роспуска современные системы автоматизации горочных процессов предусматривают функции контроля результатов роспуска на основе отслеживания передвижений отцепов и маневрового подвижного состава. По окончанию роспуска система выявляет наличие "чужаков" на сортировочных путях и формирует информацию о фактическом разложении расформированного состава по путям для передачи ее в АСУ СС. При использовании на горках ГБМ и ГПМ вагоноосаживателей прицельное торможение используется только на II ТП, при этом отцепы из III ТП выпускаются с постоянной скоростью 1,4-1,5 м/с независимо от ходовых свойств отцепа и длины свободной части пути, после чего с помощью вагоноосаживателей с той же скоростью перемещаются до соединения со впереди стоящими на пути вагонами. Вагоноосаживатели располагаются внутри рельсовой колеи и воздействуют на гребни колес или их круги катания. Они имеют исходное (нерабочее) положение, при котором все части конструкции не выходят за пределы габарита приближения строений, и рабочее, при котором происходит взаимодействие вагоноосаживателей с движущимися по сортировочным путям вагонами. Устройства управления вагоноосаживателями обеспечивают перевод их в рабочее состояние из исходного и обратно, формируют команды движения вперед и назад, управляют режимами работы электропривода, а также выполняют ряд контрольных функций. Для исключения самопроизвольного ухода вагонов в конце сортировочных путей на горках ГБМ и ГПМ рекомендуется устанавливать заграждающие устройства, представляющие собой путевой механизм, воздействующий на колеса вагонов. Заграждающее устройство в рабочем состоянии обеспечивает остановку и последующее удержание вагонов, а в исходном (нерабочем) состоянии - свободный пропуск через них подвижного состава. Управление ЗУ может производиться составителем вагонов с переносного или стационарного пультов управления. Выбираю следующий вариант механизации и автоматизации сортировочной горки, на основе которого составляю структурную схему выбранных технических средств.  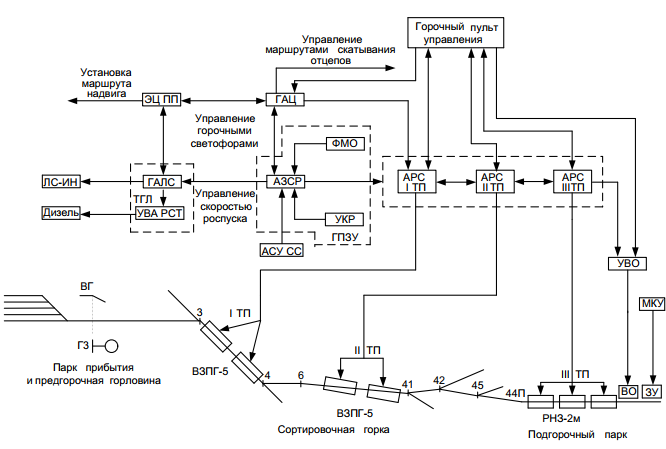 Рис. Структурная схема технических средств автоматизации сортировочного процесса ИСПОЛЬЗУЕМАЯ ЛИТЕРАТУРА 1. Устинский А. А. и др. Автоматика, телемеханика и связь на железнодорожном транспорте. М.: Транспорт, 1985. 2. Савченко И. Е. и др. Железнодорожные станции и узлы. М.: Транспорт, 1973. Переборов А. С. и др. Автоматика и телемеханика на железнодорожном транспорте. М.: Транспорт, 1985. Кравцов Ю. А. и др. Системы железнодорожной автоматики и телемеханикики. М.: Транспорт, 1996. Кокурин И. М., Кондратенко Л. Ф. Эксплуатационные основы устройств железнодорожной автоматики и телемеханики. М.: Транспорт, 1989. Казаков А. А, Бубнов В. Д., Казаков Е. А. Системы интервального регулирования движения поездов. М.: Транспорт. 1986. Казаков А. А., Бубнов В. Д., Казаков Е. А. Станционные устройства автоматики и телемеханики. М.: Транспорт, 1990. Однопозов Ю. А. и др. Электрическая централизация маневровых районов станций. М.: Транспорт, 1985. Правила и нормы проектирования сортировочных устройств на железных дорогах Союза ССР. ВСН 207-89. МПС СССР. - М.: Транспорт, 1993. 10. Муха Ю. А., Тишков Л. Б., ШейкинВ. П. Пособие по применению Правил и норм проектирования сортировочных устройств. М.: Транспорт, 1994. 11. Сагайтис В.С, Соколов В.Н. Устройства механизированных сортировочных горок М.: Транспорт, 1988. Модин Н. К. Механизация и автоматизация станционных процессов. М.: Транспорт, 1985. В. С. Аркатов, Н. Ф. Котляренко, А. И. Баженов, Т. Л. Лебедева Справочник «Рельсовые цепи магистральных железных дорог», под редакцией канд. техн. наук В. С. Аркатова. М.: Транспорт, 1982 |