Частота тока сети
 Скачать 115.03 Kb. Скачать 115.03 Kb.
|

|
Тема: Асинхронная машина при неподвижном роторе. Индукционный регулятор фазорегулятор Электромагнитные процессы в асинхронном двигателе с заторможенным ротором аналогичны процессам, происходящим в трансформаторе. Если к обмотке статора подвести напряжение сети U1, а обмотку ротора разомкнуть (например, в двигателе с фазным ротором с помощью подъема щеток), то вращающееся поле статора, пересекая обмотки статора и ротора, индуктирует в них фазные ЭДС Е1 и Е2: Е1 = 4,44f1w1kоб1Фm ; (2-4) Е2 = 4,44f1w2kоб2Фm , (2-5) где f1 – частота тока сети; w1, w2 – числа витков фазных обмоток статора и ротора; kоб1, kоб2 – обмоточные коэффициенты соответствующих обмоток; Фm – амплитудное значение основного магнитного потока. Рассмотренный режим аналогичен режиму холостого хода трансформатора. Однако, относительное значение тока холостого хода у асинхронного двигателя больше, чем у трансформатора из-за двойного воздушного зазора между статором и ротором, который увеличивает магнитные потоки рассеяния. На основании второго закона Кирхгофа для одной фазы статорной обмотки можно записать следующее уравнение U1 = -E1+jI0x1+I0r1 , (2-6) где U1 – фазное напряжение источника питания; Е1 – фазная ЭДС статорной обмотки; I0 – ток холостого хода; x1 – индуктивное сопротивление рассеяния фазной обмотки статора; r1 – активное сопротивление этой обмотки. Коэффициент трансформации ЭДС асинхронного двигателя  . (2-7) . (2-7)Если роторную обмотку двигателя замкнуть, а сам ротор затормозить, то двигатель будет работать в режиме короткого замыкания. Относительное значение напряжения короткого замыкания, при котором I1К=I1Н у двигателя больше, чем у трансформатора из-за больших магнитных потоков рассеяния. Физическая сущность явлений при коротком замыкании асинхронного двигателя та же, что и в трансформаторе. Если пренебречь для режима короткого замыкания МДС, создающей основной магнитный поток, то можно записать F1= - F2 , (2-8) где F1 и F2 – намагничивающие силы статорной и роторной обмоток F1 = 0,9m1w1kоб1I1, (2-9) F2= 0,9m2w2kоб2I2 , (2-10) где m1 и m2 – числа фаз соответствующих обмоток. Из равенства МДС F1 и F2 можно определить коэффициент трансформации токов при m1 = m2 , ki =  По аналогии с трансформатором обмотку ротора приводят к числу фаз и числу витков обмотки статора. Для приведенной асинхронной машины имеем следующие параметры: E2 = Е1 = Е2kE; I1 = I2 = I2/ki; (2-11) r2 = r2kEki; x2 = x2kEki; rk = r1+r2; xk = x1+x2. 2.1.3 Работа асинхронной машины при вращающемся роторе В статорной обмотке при переходе от неподвижного ротора к подвижному практически ничего не меняется. В роторной же обмотке изменяется частота ЭДС из-за возникновения скольжения, f2S = f1s. (2-12) Для ЭДС и индуктивного сопротивления обмотки ротора можно записать: E2S = 4,44f2Sw2kоб2Фm = 4,44f1sw2kоб2Фm = E2s; (2-13,а) x2S = 2f2SL2= 2f1sL2 = x2s, (2-13,б) где L2 - индуктивность рассеяния фазной обмотки ротора. Активное сопротивление при малой частоте тока в роторной обмотке можно считать неизменным, т.е. r2 = r2 = const, тогда по закону Ома ток в роторной обмотке  (2-14) (2-14)Последнее выражение для тока позволяет режим двигателя с вращающимся ротором привести к эквивалентному режиму при неподвижном роторе. В этом режиме во вторичной цепи вместо ЭДС при вращении ротора E2S с частотой f2S будет существовать ЭДС при неподвижном роторе E2 с частотой f1, а вместо индуктивного сопротивления при вращении ротора x2S во вторичной цепи действует индуктивное сопротивление при неподвижном роторе x2. Для сохранения величины и фазы тока I2 необходимо вместо r2, действующего при вращении, ввести новое сопротивление r2/s. Представим r2/s как  . (2-15) . (2-15)Тогда эквивалентная схема роторной цепи имеет вид рисунка 2.1 а схема замещения для приведенной машины изображена на рисунке 2.2 . 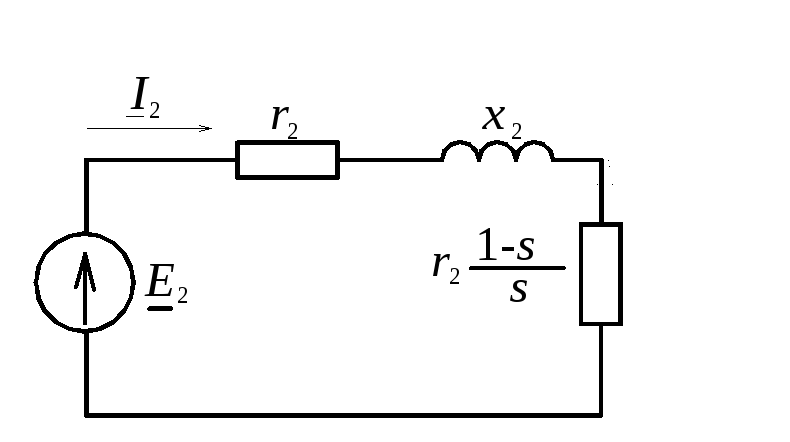 Рисунок 2.1 Эквивалентная схема роторной цепи 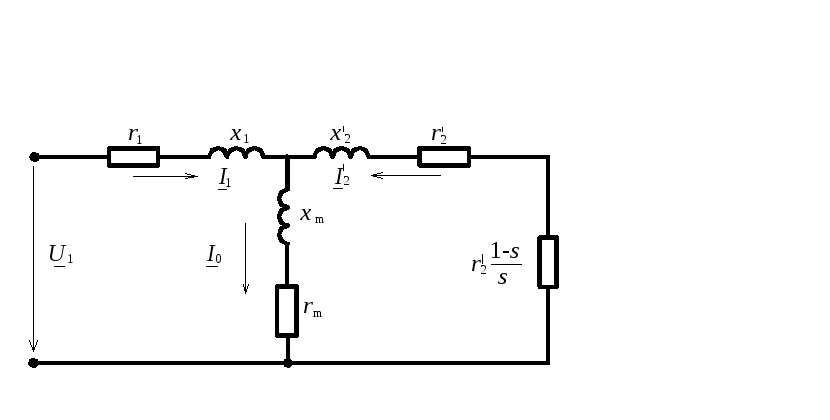 Рисунок 2.2 Т – образная схема замещения асинхронного двигателя В приведенной Т – образной схеме замещения скольжение оказывает влияние на все три тока цепи, что затрудняет анализ процессов в двигателе. Поэтому часто применяют Г – образную схему с вынесенной на входные зажимы намагничивающей ветвью (рисунок 2.3). 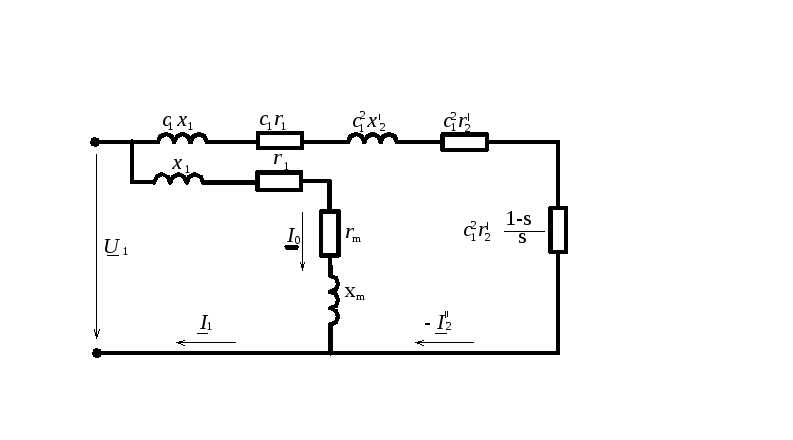 Рисунок 2.3 Г – образная схема замещения асинхронной машины В данной схеме с помощью поправочного коэффициента с1 компенсируется некоторая погрешность, возникающая при вынесении намагничивающей ветви на входные зажимы. Этот коэффициент можно определить по формуле  . (2-16) . (2-16)+На схемах замещения r1 и x1 – фазное активное и индуктивное сопротивления статорной обмотки, r2 и x2 - аналогичные приведенные сопротивления роторной обмотки, rm и xm – параметры намагничивающей ветви,  и и 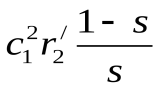 - элементы, на которых выделяется электрическая мощность, равная механической мощности на валу двигателя. - элементы, на которых выделяется электрическая мощность, равная механической мощности на валу двигателя.Фазорегуляторы и индукционные регуляторы напряжения Фазорегулятор. Асинхронная машина с заторможенным фазным ротором может дать со стороны одной из обмоток постоянную по величине, но меняющуюся по фазе ЭДС. Для этого обмотки машины следует включить, как показано на рис. 5.6, а, а ротор повернуть в любую сторону на угол α. На такой же угол окажется повернутым вектор ЭДС вторичной обмотки относительно вектора первичной ЭДС: в рассматриваемом случае результирующий поток Φ в зазоре машины набегает сначала, например, на обмотку фазы B, а позже − на обмотку фазы b, оси которых пространственно смещены на угол поворота α. Если принять для простоты, что у рассматриваемой асинхронной машины r1 = r2 = xσ1 = xσ2 = 0, то U1 = E1 и U2 = E2. В этом случае диаграмма напряжений для одной из фаз примет вид, показанный на рис. 5.6, б. 189 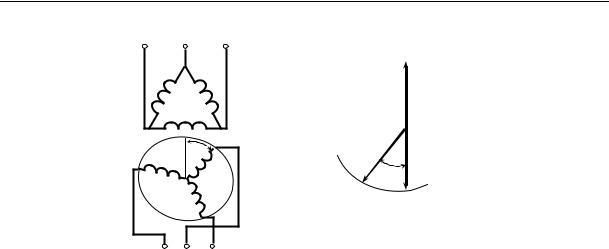 5. Асинхронные машины
Рис. 5.6. Схема фазорегулятора Фазорегулятор представляет поворотный трансформатор с регулируемой фазой вторичного напряжения относительно первичного. Поворот ротора осуществляют при помощи червячного редуктора с самоторможением, так как на ротор фазорегулятора при нагрузке действует вращающий момент. Это относится и к другим машинам с заторможенным ротором. Фазорегуляторы применяют главным образом в лабораториях, в частности, при испытании счетчиков электрической энергии различных реле и других приборов и аппаратов. Трехфазный индукционный регулятор служит для регулирования на- пряжения трехфазной сети переменного тока. Обмотки регулятора включают по схеме автотрансформатора, и регулятор представляет собой поворотный автотрансформатор. Обмотки статора и ротора асинхронной машины можно соединить, как показано на рис. 5.7, а, и подключить обмотку ротора к сети напряжением Uвх. Ток обмотки ротора создаст вращающееся магнитное поле, которое индуктирует в каждой обмотке ЭДС E1 и E2. Эти ЭДС, оставаясь неизменными по величине, могут отличаться по фазе. При совпадении осей обмоток статора и ротора сдвига фаз между ЭДС E1 и E2 нет (рис. 5.7, б). Напряжение на выходных зажимах определится арифметической суммой векторов ЭДС Е1 и Е2 и достигнет макси- мального значения (Uвых = Еmax ). При повороте ротора на некоторый угол ±α вектор ЭДС Е2 опережает или отстает на тот же угол относительно ЭДС Е1 . При повороте ротора на 180° векторы ЭДС Е1 и Е2 направлены встречно и выходное напряжение равно разности этих ЭДС (Uвых = Еmin ). 190  5. Асинхронные машины В общем случае напряжение на выходных зажимах определяется векторной суммой:
и при равенстве эффективных витков статорной и роторной обмоток может плавно изменяться от нуля (при α = ±180°) до двойного линейного напряжения сети (при α = 0). Индукционные регуляторы по своей работе аналогичны автотрансформаторам, и их электромагнитная (расчетная) мощность тем меньше проходной (полезной), чем ниже пределы регулирования напряжения. Преимуществом регуляторов является плавное регулирование напряжения в широких пределах. К недостаткам этих машин следует отнести: •искажение формы кривой ЭДС (и выходного напряжения) зубцовыми и высшими гармониками магнитного поля; •возникновение вращающих моментов на валу при α ≠ 0; •расхождение по фазе напряжений перед регулятором и за ним. Последние два недостатка устраняют, сдвоив регуляторы, т. е. же- стко соединив их валы и изменив порядок чередования фаз в одной из машин. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||