ответы на вопросы Глава 1. Что является источником сигналов в рну
 Скачать 1.91 Mb. Скачать 1.91 Mb.
|

|
Что является источником сигналов в РНУ? Сигналы специальных радиоустройств, расположенных в радионавигационных точках (РНТ), местоположение которых точно известно, или сигналы, отраженные от подстилающей поверхности. Что такое радионавигационная система и каковы ее отличия от радиолокационной системы? Радионавигационной системой называют совокупность устройств, предназначенных для управления движением объектов из одной точки пространства в другую по оптимальным в данных условиях траекториям. Определение местоположения осуществляется с помощью радиосредств. Что является общим у радионавигационных и радиолокационных систем? И радиолокация, и радионавигация являются областями радиоэлектроники. Радиолокационные и радионавигационные системы относятся к классу информационных систем. Их объединяет задача извлечения информации из улавливаемых электромагнитных колебаний, общим является и содержание информации координаты и параметры движения объектов Какие координатные системы используют в радионавигации и в чем их отличия? В радионавигации применяют местную либо глобальные системы координат Местная сферическая система координат может быть как неподвижной относительно земной поверхности, так и связанной с подвижным объектом. Глобальные системы координат используются в РНС, с помощью которых МП определяется на расстояниях R>Rпв Как используют РНС при навигации(вождении) ЛА?  В неподвижной системе начало координат О располагается в точке размещения антенны РНУ или РНС, а ось X обычно совмещается с северным (С) направлением меридиана, проходящего через точку О. В сферической системе по результатам измерения определяются наклонная дальность R, азимут ɑ и угол места β. В РНС вместо измерения β обычно измеряют высоту H. Если РНУ установлено на ЛА, то ось X совмещают с его продольной осью, а ось Z- с направлением правого крыла. В этом случае такая связанная с ЛА координатная система перемещается вместе с ЛА и поворачивается при его эволюциях. Рассматриваемые системы координат используются при дальностях R, не превышающих нескольких сотен километров (в зоне прямой видимости). Зачем используют поиск сигнала и какие разновидности поиска Вы знаете? Большинство параметров принимаемого сигнала априори неизвестно. Поэтому при обнаружении приходится осуществлять поиск характерного информативного параметра радиосигнала, отличающего его от сопутствующих шумов и помех. При этом приходится либо поочередно просматривать все значения (последовательный поиск) этого параметра, либо одновременно наблюдать все эти значения (параллельный поиск) Может ли масштабный коэффициент быть случайной величиной? Информативным параметром может быть как время прихода, частота, начальная фаза или амплитуда сигнала, так и направление прихода сигнала (два угла в пространстве) и параметры поляризации поля. В ряде практически важных ситуаций амплитуда (или мощность) принимаемого сигнала мала, а сам сигнал имеет случайный характер. Укажите свойства электромагнитных волн, используемых для определения навигационного элемента. Распространяться в однородной (изотропной) среде прямолинейно и с постоянной скоростью Что такое информативный параметр сигнала и как он связан с навигационным элементом? Параметр радиосигнала, в котором содержится информация о W, называется информативным и обозначается в дальнейшем буквой  . Функционально параметры W и связаны соотношением . Функционально параметры W и связаны соотношением Чему равно время запаздывания сигнала, если он прошел расстояние 150 км? tR=R/c=150000/3•108=0,0005c Чему равен доплеровский сдвиг несущей частоты сигнала f0 = 109 Гц, если передатчик и приемник сближаются со скоростью 1200 км/ч? Fд=-(2V/с) f0=-(2•333,3 /(3•108)) 109=-2222 Сравните методы определения местоположения объектов. Метод счисления пути основан на интегрировании по времени измеренного вектора скорости ЛА относительно поверхности Земли (рис. 1.4,а). В качестве датчика системы счисления применяют доплеровский измеритель скорости (ДИС) (рис. 1.4,6), что и определяет ее название - доплеровская навигационная система.  С помощью ДИС обычно измеряют модуль вектора скорости Vr в горизонтальном полете (путевая скорость),представляющий собой сумму векторов воздушной скорости Vвоз и скорости ветра Vвт, и угол сноса ɑс , т.е. угол между продольной осью ЛА и направлением вектора Vr. Вычислительное устройство определяет продольную Vx и поперечную Vy составляющие вектора Vr и рассчитывает текущее местоположение ЛА. Доплеровский измеритель определяет направление вектора Vr относительно продольной оси ЛА. Для нахождения направления полета по отношению к поверхности Земли необходимо знать курс ЛА ψ, информация о котором поступает от курсовой системы КС. При известном курсе ЛА могут быть получены составляющие скорости Vx и Vy интегрирование которых дает составляющие пройденного пути Vx и Sy. Для определения текущих координат ЛА в систему вводят координаты х0 и у0 начального пункта маршрута НПМ, с момента пролета которого начинается счисление пути. Доплеровская навигационная система не нуждается в наземных станциях. Главной ее особенностью является ухудшение точности определения местоположения со временем, что объясняется интегрированием погрешностей ДИС. Погрешность определения местоположения в системах счисления составляет 1,5% от пройденного пути для доплеровской навигационной системы Позиционный метод основан на использовании поверхностей или линий положения для определения местоположения объекта. Поверхность положения представляет собой геометрическое место точек в пространстве, соответствующих одному значению W, т.е. одному значению дальности, угла и т.п. Местоположение объекта находят как точку пересечения трех поверхностей положения (ПП). В местной системе координат (рис. 1.5,а) в предположении, что объект расположен в точке М такими поверхностями положения обычно являются ПП1 (W1 = R = const), ПП2 (W2=a = const) и ПП3 (W3 = H = const). 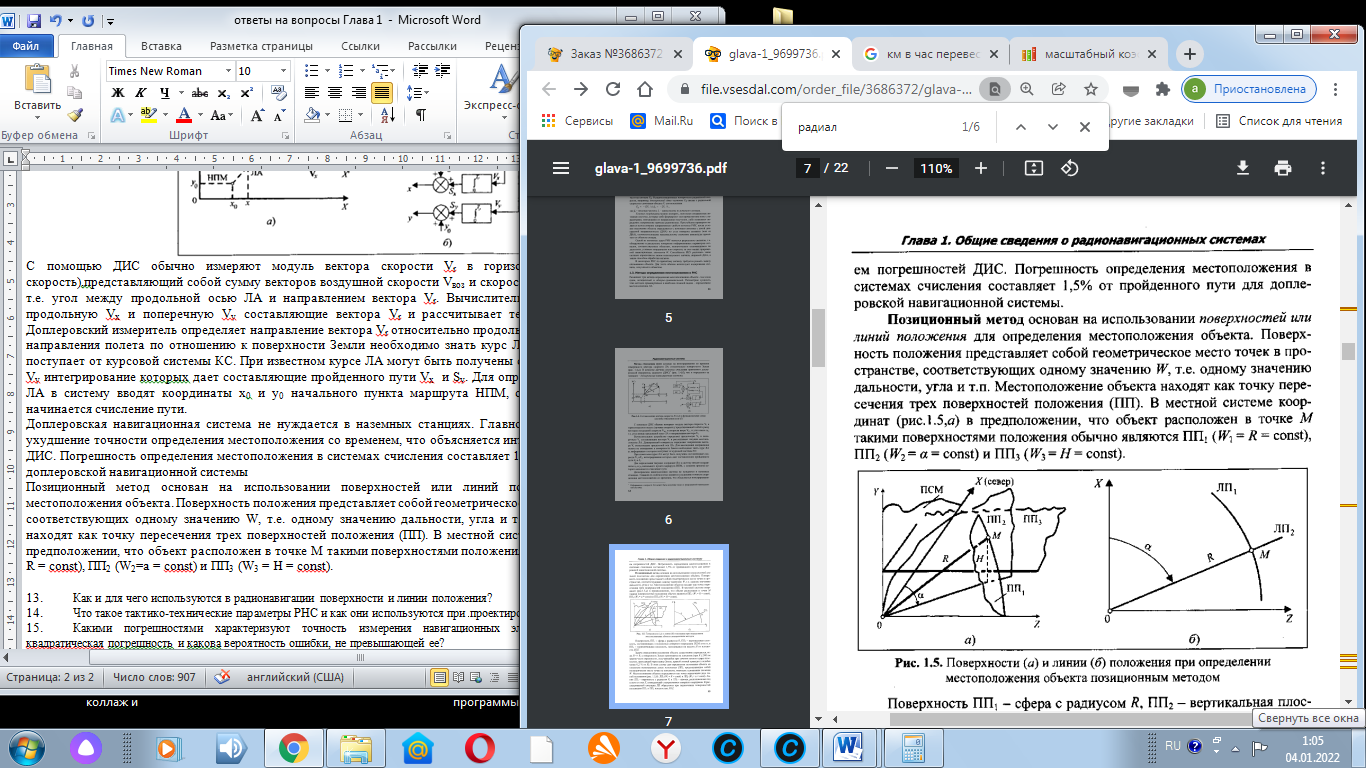 Задача определения положения объекта существенно упрощается, если H « R, а поверхность Земли принимается за плоскость (при R =< 500 км замена части окружности, получающейся при сечении земного шара плоскостью, проходящей через центр Земли, прямой линией приводит к ошибке менее 0,2 % от R). В этом случае для определения положения объекта на плоскости используются линии положения (ЛП), представляющие собой геометрическое место точек на плоскости, имеющих одинаковые значения W. Местоположение объекта определяется как точка пересечения двух линий положения (рис. 1.5,6): ЛП1 (W1 = R = const) и ЛП2 (W2 = а = const). Линия ЛП1 - окружность с радиусом R, а ЛП2 - прямая, расположенная под углом а к оси X, совпадающей с направлением северного меридиана. В рассматриваемой ситуации ЛП образуются при пересечении поверхностей положения ПП1 и ПП2 плоскостью XOZ. В позиционных РНС измеряют элементы W, характеризующие положение ЛА относительно стационарных или подвижных опорных передающих или приемопередающих радиостанций, расположенных в РHТ - радионавигационных точках с известными координатами (или на известных траекториях). Большинство РНС реализуют позиционный метод, что объясняется возможностью определения местоположения без учета и знания пройденного пути. Однако это возможно только в зоне действия опорных станций. Кроме того, на точность позиционных РНС сильно влияют помехи, отраженные сигналы и т.п. Точность позиционных систем зависит от принципа их построения и от используемого диапазона радиоволн и характеризуется погрешностью от нескольких сотен метров в системах УКВ диапазона до нескольких километров в РНС большой дальности, работающих в диапазонах километровых и мириаметровых волн. Обзорно-сравнительный метод основан на определении каких либо характеристик местности, над которой движется ЛА, или характеристик геофизических полей Земли и сравнении их с соответствующими характеристиками, заложенными в память системы. В системах, реализующих данный метод, используется корреляционная связь между этими характеристиками, а для нахождения отклонений от заданной траектории полета - различного типа корреляционные устройства. Такие системы называют также корреляционно-экстремальными, поскольку экстремум (максимум или минимум) корреляционной функции измеренных и заложенных в память системы характеристик достигается при точном соответствии траектории полета заданной. Примером реализации обзорно-сравнительного метода может служить система, использующая информацию о поле высот рельефа местности h(х, у) (рис. 1.6). В блок памяти (БП) перед полетом вводится информация hэ(х, у) о распределении высот местности в некоторой полосе вдоль маршрута полета. Текущая высота полета Нр определяется радиовысотомером (РВ) и сравнивается с барометрической высотой Нб. Вычислительные устройства (ВУ) определяют корреляционную функцию измеренного поля высот ha(х, у) и hэ(х, у) и вырабатывают сигналы Δх и Δz коррекции полета для системы автоматического управления (САУ). Погрешность определения МП в такой системе может составлять несколько десятков метров. 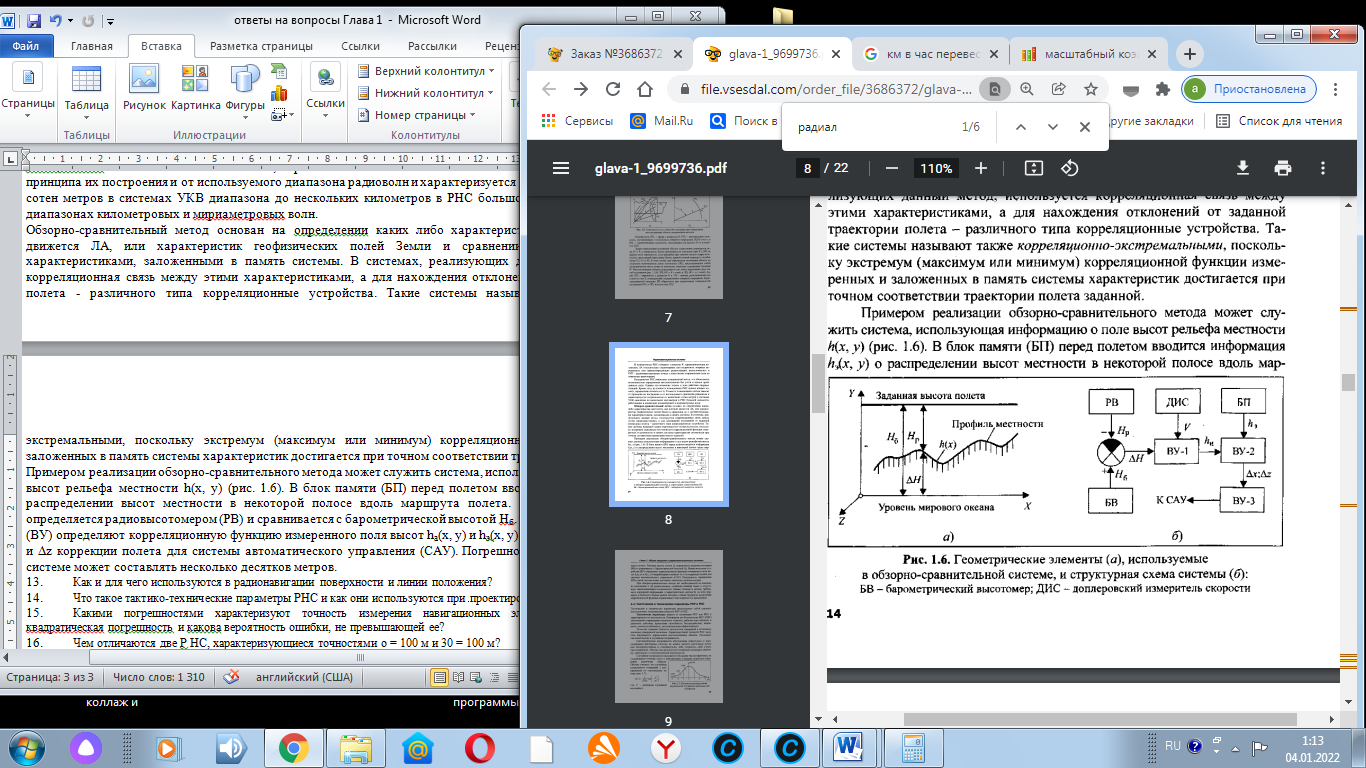 При обзорно-сравнительном методе нет необходимости во внешних по отношению к ЛА радиостанциях, ослаблено влияние помех и отсутствуют накапливающиеся погрешности. Однако сложность метода, требующего априорной информации о характеристиках местности на всем маршруте и большого объема памяти системы, а также трудности вычисления корреляционной функции ограничивают пока широкое его применение. Как и для чего используются в радионавигации поверхности и линии положения? Задача определения положения объекта существенно упрощается, если H « R, а поверхность Земли принимается за плоскость (при R =< 500 км замена части окружности, получающейся при сечении земного шара плоскостью, проходящей через центр Земли, прямой линией приводит к ошибке менее 0,2 % от R). В этом случае для определения положения объекта на плоскости используются линии положения (ЛП), представляющие собой геометрическое место точек на плоскости, имеющих одинаковые значения W. Местоположение объекта определяется как точка пересечения двух линий положения (рис. 1.5,6): ЛП1 (W1 = R = const) и ЛП2 (W2 = а = const). Линия ЛП1 - окружность с радиусом R, а ЛП2 - прямая, расположенная под углом а к оси X, совпадающей с направлением северного меридиана. В рассматриваемой ситуации ЛП образуются при пересечении поверхностей положения ПП1 и ПП2 плоскостью XOZ. Поверхность положения представляет собой геометрическое место точек в пространстве, соответствующих одному значению W, т.е. одному значению дальности, угла и т.п. Местоположение объекта находят как точку пересечения трех поверхностей положения (ПП). В местной системе координат (рис. 1.5,а) в предположении, что объект расположен в точке М такими поверхностями положения обычно являются ПП1 (W1 = R = const), ПП2 (W2=a = const) и ПП3 (W3 = H = const). Что такое тактико-технические параметры РНС и как они используются при Тактические и технические параметры представляют собой совокупность величин, описывающих качество РНУ и РНС. Пропускная способность является мерой способности РНУ или РНС обеспечивать радионавигационной информацией определенное число объектов навигации (ОН) в единицу времени. Ограничение пропускной способности свойственно позиционным системам, в которых объект и опорная станция соединены двусторонней линией радиосвязи. Быстродействие увеличивается при одновременности и автоматизации отсчета W и при использовании ЭВМ для обработки информации. Считается, например, что на дозвуковых ЛА время, затрачиваемое на определение МП, не должно превышать 1 мин при интервалах между измерениями не более 10 мин. На сверхзвуковых ЛА это время снижается до нескольких секунд, а интервалы между измерениями не должны быть более 5 мин. По мнению зарубежных специалистов надежность навигационных средств сверхзвукового самолета должна быть такой, чтобы вероятность отказа не превышала 10-4 за три часа (средняя наработка до отказа - не менее 3*104 ч). При полетах, например, над Северной Атлантикой надежность навигационного оборудования должна обеспечивать практически полную безаварийность (одно летное происшествие по вине навигационного оборудования на 107 -108 летных часов). По установившейся концепции посадочное оборудование должно обеспечивать безопасную автоматическую посадку при вероятности летного происшествия, не превышающей 10-7 . Для количественной оценки помехоустойчивости используют отношение сигнал/помеха (обычно по напряжению), при котором погрешность определения W не превышает выбранного значения с заданной вероятностью. Важнейшие технические параметры: значение и стабильность несущей частоты; вид и параметры модуляции излучаемых сигналов (формат сигнала); диаграммы направленности антенн; мощность передатчика; чувствительность приемника, масса и объем бортовой аппаратуры. Эти параметры определяют рентабельность ЛА. Отклонение любого технического параметра от заданного значения влияет на определенный тактический параметр, что в отдельных случаях может вызвать отказ РНУ (РНС). Одними из параметров, определяющих рентабельность ЛА являются масса и объем бортовой аппаратуры. Увеличение ее массы и объема приводит при фиксированной взлетной массе JIA к снижению полезной нагрузки либо запаса топлива, либо к увеличению взлетной массы, что сопровождается ухудшением летно-технических характеристик JIA (дальности полета, маневренности и др.). Какими погрешностями характеризуют точность измерения навигационных элементов? Что такое средняя квадратическая погрешность и какова вероятность ошибки, не превышающей ее? Различают систематические и случайные погрешности. Средняя квадратическая погрешнось (СКП) вычисляется как корень квадратный из дисперсии результатов измерений. Вероятность того, что погрешность измерений не превысит σ при гауссовском законе w(x) равна 0,683. Чем отличаются две РНС, характеризующиеся точностями σ = 100 м и 3σ = 100 м? Для систем повышенной точности обычно применяют максимальную погрешность, равную Зσ Зачем нужно знать рабочую область (зону) РНС? Рабочая зона (область) - область пространства, в пределах которой погрешность σмп нахождения местоположения с помощью РНС с известной вероятностью не превышает заданную σ3. Рабочая область характеризуется дальностью действия системы Rmах, т.е. максимальным удалением от РНС, на котором обеспечивается заданная точность определения координат. За Rmах часто принимают максимальное расстояние в пределах рабочей зоны. Вероятность безотказной работы РНУ связана с временем наработки экспоненциальной зависимостью. Какова вероятность сохранения рабспоспособности РНУ, если РНУ проработало время, равное среднему времени наработки на отказ? Средняя наработка до отказа является математическим ожиданием наработки объекта (продолжительности его работы) до первого отказа, следовательно вероятность очень мала. Определите максимальную дальность действия наземного радиомаяка РСБН, если он предназначен для работы с ЛА, летящими на высоте 16000 м? За часто принимают максимальное расстояние в пределах рабочей зоны (области). угломерно-далъномерным Перечислите особенности пассивных и активных РНУ. Активные устройства и системы извлекают информацию из отраженных от земной поверхности сигналов, т.е. основаны на принципах радиолокации. Отличительным признаком таких РНУ является наличие передатчика на определяющем свое местоположение объекте. Вырабатываемый блоком формирования (БФС) сигнал усиливается и (при необходимости) преобразуется в передатчике (Прд), сигнал которого поступает на передающую антенну А-1 и излучается в сторону земной поверхности. Отраженный от этой поверхности сигнал принимается антенной А-2, поступает на приемник (Прм), а затем - на измеритель (Изм), где он сравнивается с сигналом, полученным от БФС. Таким образом, формирование излучаемого (опорного) сигнала и его сравнение с отраженным выполняются на одном и том же объекте. 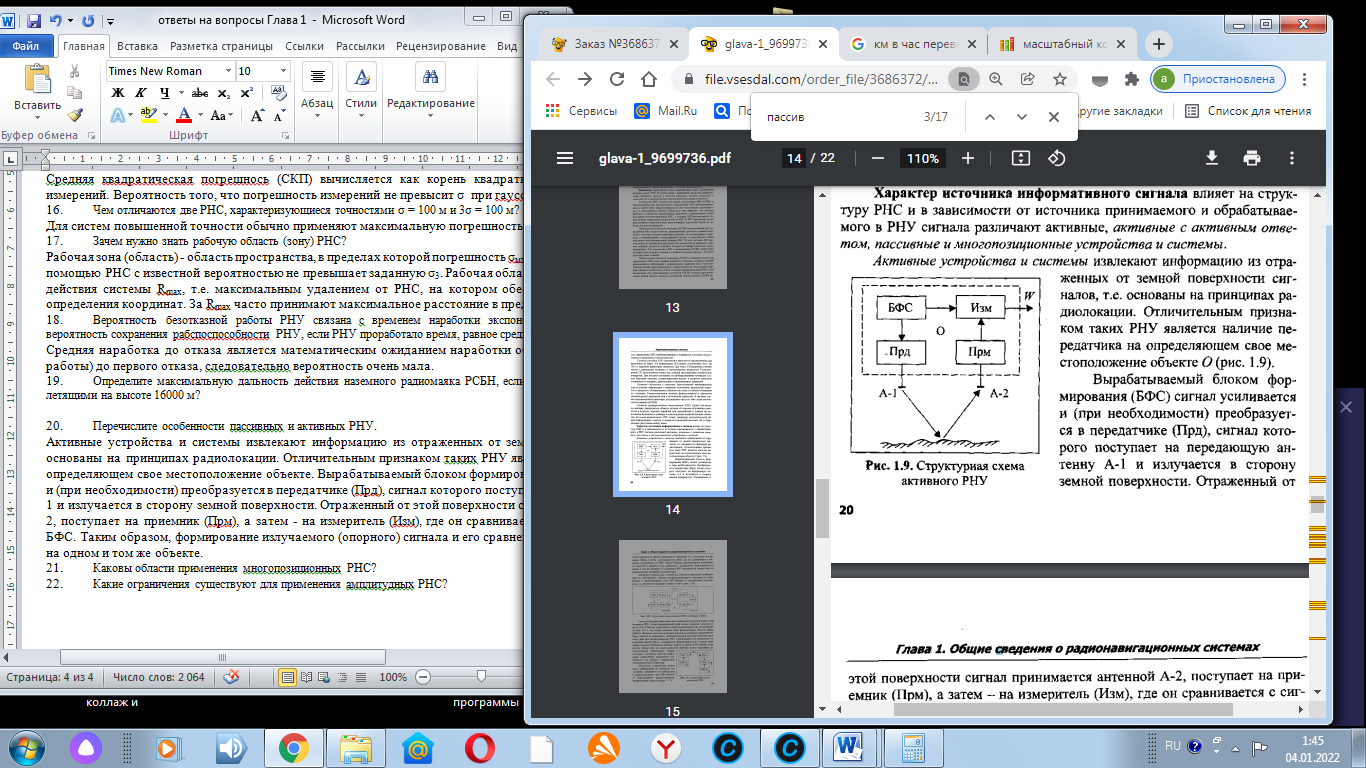 Пассивные устройства извлекают информацию из сигналов, излучаемых внешними по отношению к определяющему свое МП объекту О передающими радиостанциями, называемыми опорными. Опорная станция (ОС) излучает сигнал, формируемый блоком БФС-1. Этот сигнал принимается на объекте (О) и поступает на измеритель (Изм), где производится его сравнение с сигналом БФС-2. Особенностью пассивных РНУ является сложность измерения информативного параметра сигнала, так как для этого необходимо, чтобы БФС-2 вырабатывал точную копию сигнала, формируемого на ОС блоком БФС-1. 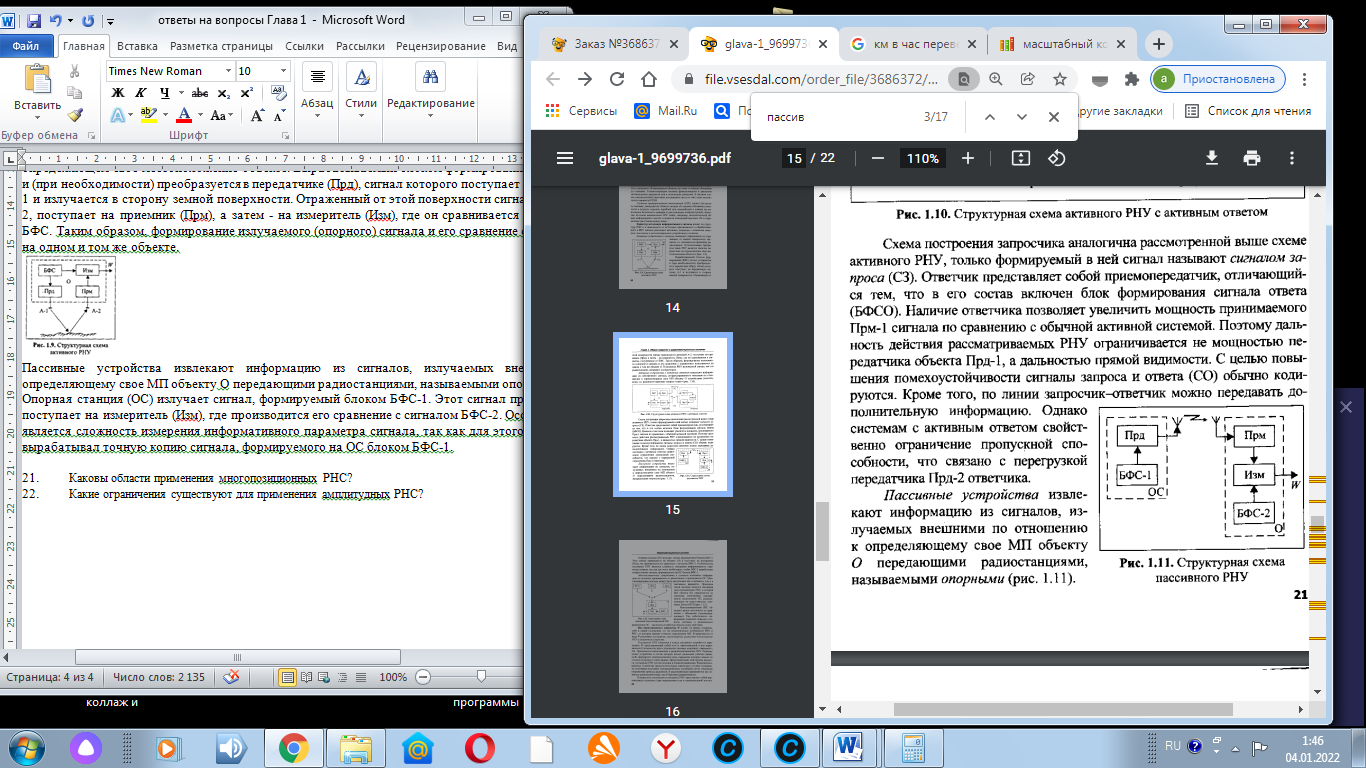 Каковы области применения многопозиционных РНС? Радиомаячные устройства, в состав которых входит радиомаяк (обычно наземный), формируют электромагнитное поле, параметры которого зависят от угловых координат точки приема. Представителями этой группы являются угломерные РНУ систем посадки и ближней навигации. Радиопеленгационные устройства (радиопеленгаторы) определяют угловые координаты источника излучения электромагнитных колебаний путем измерения направления прихода радиоволн. В радионавигации применяются как наземные радиопеленгаторы, так и бортовые (радиокомпасы). Активные дальномеры применяют для определения высоты полета, а при наличии ответчика - для измерения расстояния от несущего радиодальномер объекта до РНТ, где размещается ответчик. Какие ограничения существуют для применения амплитудных РНС? Специфическими факторами, влияющими на точность амплитудных РНУ, являются крутизна диаграммы направленности антенн РНУ при ɵР = 0 и наличие сигналов, отраженных от находящихся вблизи от РНУ местных объектов. |