коррелятор. коррелятор (1). Цифровой коррелятор приемника сигналов спутниковых радионавигационных систем
 Скачать 69.6 Kb. Скачать 69.6 Kb.
|

|
Цифровой коррелятор приемника сигналов спутниковых радионавигационных систем. Основные процедуры, осуществляемые цифровыми корреляторами приемников сигналов СРНС, заключаются в корреляции сигнала, поступающего с выхода коммутатора сигналов СРНС, с копией искомого сигнала и накопления результатов корреляции в накопителях накопительных блоков в течение определенного интервала времени. Обычно этот интервал составляет одну миллисекунду, что соответствует длине кодовой псевдослучайной последовательности (ПСП) опорного С/А кода СРНС GPS и ГЛОНАСС. Указанная корреляция осуществляется путем умножения цифровых отсчетов входного сигнала на генерируемую внутри цифрового коррелятора локальную копию искомого сигнала, т.е. копию сигнала выбранного спутника СРНС. Технический результат цифрового коррелятора- обеспечение ускорения поиска и обнаружения сигналов. Состав схемы цифрового коррелятора приемника сигналов СРНС представлен на рис. 1 . 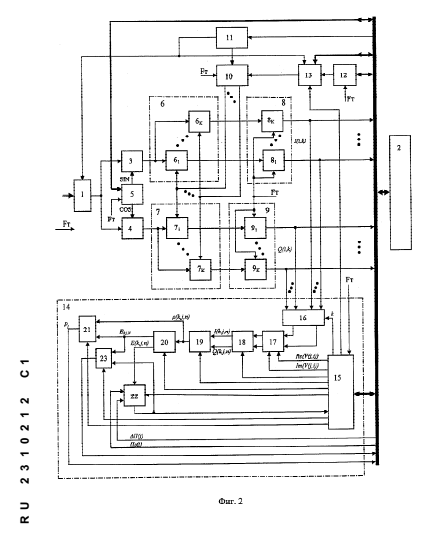 Рисунок 1 - структурная схема цифрового коррелятора приемника сигналов СРНС Цифровой коррелятор приемника сигналов СРНС содержит: коммутатор сигналов СРНС (1), процессор (2), первый (3) и второй( 4) цифровые смесители, относящиеся, соответственно, к синфазному и квадратурному каналам обработки, цифровой управляемый генератор несущей (5), первый (6) и второй (7) блоки цифровых демодуляторов, относящиеся, соответственно, к синфазному и квадратурному каналам обработки, первый (8) и второй (9) накопительные блоки, относящиеся, соответственно, к синфазному и квадратурному каналам обработки, программируемую линию задержки (10), регистр управления (11), цифровой управляемый генератор кода (12), генератор, опорного кода(13), обнаружитель сигнала (14) и контроллер (15). Цифровой коррелятор имеет два основных режима работы - режим поиска сигнала и режим слежения за сигналом. Режим поиска сигнала характеризуется двумя этапами, на первом из которых осуществляется оценка мощности шума, а на втором - собственно поиск сигнала с использованием переменного порога, значение которого устанавливается в зависимости от результата оценки мощности шума и номера некогерентного отсчета. В обобщенном виде работа цифрового коррелятора описывается следующим образом. На входы коммутатора сигналов (1) СРНС поступают выборки действительных сигналов СРНС ГЛОНАСС и GPS, формируемые аналого-цифровыми преобразователями блока радиочастотного преобразования приемника сигналов СРНС. В соответствии с командой процессора (2), выдаваемой в регистр управления(11), коммутатор сигналов СРНС (1) подключает на свой выход сигналы одной из СРНС - ГЛОНАСС или GPS. Сигналы выбранной СРНС поступают на сигнальные входы цифровых смесителей (3) и (4), на опорные входы которых поступают квадратурные сигналы ("SIN" и "COS") опорной частоты с соответствующих выходов цифрового управляемого генератора несущей (5). Цифровой управляемый генератор несущей (5) обеспечивает формирование квадратурных сигналов промежуточной частоты заданной литеры СРНС ГЛОНАСС, двоичный код которой выдается процессором (2), или промежуточной частоты сигналов СРНС GPS. Цифровые смесители (3) и (4) обеспечивают выделение сигналов заданной литеры СРНС ГЛОНАСС или сигналов спутников СРНС GPS и перенос спектров этих сигналов в основную полосу частот (на нулевую частоту). С выходов цифровых смесителей (3) и (4) сигналы поступают на сигнальные входы блоков (6) и (7) цифровых демодуляторов,. На группы опорных входов блоков (6) и (7) цифровых демодуляторов, с группы выходов программируемой линии задержки (10) поступают К копий опорного кода (С/А кода СРНС ГЛОНАСС или GPS), смещенные друг относительно друга на заданное время задержки, обычно равное половине длительности символа С/А кода. Блоки (6) и (7) цифровых демодуляторов с помощью входящих в их состав цифровых демодуляторов осуществляют корреляцию синфазной и квадратурной составляющих обрабатываемых сигналов с указанными К копиями опорного кода. Копии опорного кода формируются на основе сигналов, поступающих с выхода генератора (13) опорного кода, формирующего опорные псевдослучайные С/А коды спутников СРНС ГЛОНАСС или GPS. Необходимый для работы генератора (13) сигнал тактовой частоты 1,023 МГц для GPS или 0,511 МГц для ГЛОНАСС подается на его сигнальный вход с выхода цифрового управляемого генератора (12) кода. Выбор вида вырабатываемой псевдослучайной кодовой последовательности и значения тактовой частоты опорного кода осуществляется по командам процессора 2, поступающим через шину обмена данными на генераторы (12) и (13). Результаты корреляции накапливаются в накопительных блоках (8) и (9) в соответствующих накопителях на интервалах накопления, равных в режиме поиска сигнала 1/8 эпохи С/А кода (т.е. 1/8 мс), а в режиме слежения за сигналом - длительности эпохи С/А кода (т.е. 1 мс). Накопленные в накопителях данные (K синфазных и K квадратурных компонент корреляции) поступают на первую и вторую группы сигнальных входов обнаружителя сигнала (14), а также - через шину обмена данными - в процессор (2), в котором реализуются необходимые алгоритмы обработки сигналов и осуществляется формирование необходимых управляющих команд и данных, используемых при осуществлении поиска (обнаружения) сигнала и последующего слежения за сигналом. В процессе поиска сигнала процессор (2), исходя из априорной неопределенности частотно-временного положения искомого сигнала, последовательно устанавливает необходимые позиции поиска по частоте несущей и по задержке кода и выдает в контроллер (15) диапазон поиска по задержке (число временных позиций, на которых следует искать сигнал) и длительность интервала некогерентной обработки, определяемого заданным числом N миллисекундных эпох. Установка позиций поиска осуществляется путем задания текущей частоты для цифрового управляемого генератора (5) несущей, частоты кода для цифрового управляемого генератора (12) кода и временного положения копий опорного С/А кода СРНС ГЛОНАСС или GPS с помощью регистра (11) управления, генератора (13) опорного кода и программируемой линии задержки (10). На установленных позициях поиска осуществляется рассмотренная выше корреляционная обработка с формированием на выходах накопительных блоков (8) и (9) К пар квадратурных сигналов I(i, k) и Q(i, k), где i - номер интервала внутри эпохи С/А кода (i=1...8); k - номер канала корреляционной обработки, определяемый номером цифрового демодулятора. |