Обработка результатов эксперимента. Динамический режим средств измерений
 Скачать 256.95 Kb. Скачать 256.95 Kb.
|

|
МИНОБРНАУКИ РОССИИ Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В.И. Ульянова (Ленина) Кафедра ИИСТ отчет по лабораторной работе 6 по дисциплине «Метрология» Тема: Динамический режим средств измерений
Санкт-Петербург 2019 ОглавлениеОсновные теоретические положения. 2 Описание и порядок выполнения работы 3 Общие сведения. 3 Структурная схема лабораторной установки. 3 Рекомендации по сборке схемы. 4 Принцип работы схемы и методические указания. 4 Обработка результатов эксперимента 7 Выводы 9 Протокол лабораторной работы 10 ЛАБОРАТОРНАЯ РАБОТА 6.ДИНАМИЧЕСКИЙ РЕЖИМ СРЕДСТВ ИЗМЕРЕНИЙ(теоретическая основа)Цель работы - изучение динамического режима средств измерений. Задание :Ознакомиться с лабораторной установкой. Собрать схему исследования динамического звена 2-го порядка. Получить у преподавателя задание на выполнение лабораторной работы. Записать частоту f0 собственных колебаний и коэффициент демпфирования (степень успокоения) для заданных вариантов реализации динамического звена. Исследовать динамический режим заданных средств измерений при ступенчатом изменении входного сигнала. Определить динамическую погрешность при заданных параметрах звена 2-го порядка и выбранных амплитуде и частоте входных сигналов прямоугольных импульсов; погрешность определить в 6…10 точках на одном полупериоде входного сигнала. Построить графики входного и выходного сигналов исследуемого средства. Построить графики динамической погрешности. По результатам исследований сделать выводы о влиянии f0 и/или на характер изменения выходного сигнала и динамическую погрешность. Определить время tу установления выходного сигнала для различных частот f0iсобственных колебаний при заданном коэффициенте демпфирования . Построить график зависимости tу = F(f0i) при = const. При определении времени установления принять погрешность асимптотического приближения переходного процесса, равную 5% от установившегося значения. Определить время tу установления выходного сигнала для различных коэффициентов iдемпфирования при заданной частоте f0 собственных колебаний. Построить график зависимости tу = F(i) при f0 = const. По результатам пунктов 2.2, 2.3 сделать выводы о влиянии f0 и на время установления tу. Исследовать динамический режим средств измерений при синусоидальном входном воздействии. Определить погрешности в динамическом режиме при указанных параметрах (f0, ) звена 2-го порядка и заданной частоте входного сигнала; погрешности определить в 8…10 точках на одном периоде сигнала. Построить графики входного и выходного сигналов, график динамической погрешности. Сделать вывод о характере изменения динамической погрешности и оценить ее максимальное (амплитудное) значение. Основные теоретические положения.Динамические характеристики средств измерений возникают при динамическом режиме его работы. Динамический режим работы средства измерений - это такой режим, при котором средство измерений воспринимает изменение входной величины и размеры измеряемой величины изменяются во времени. Динамические характеристики средства измерений описывают инерционные свойства средств измерений и определяют зависимость выходного сигнала средств измерений от меняющихся во времени величин: входного сигнала, нагрузки, влияющих величин. Для описания поведения большинства средств измерений в динамическом режиме работы с достаточной степенью приближения можно использовать линейное дифференциальное уравнение с постоянными коэффициентами :  где an … a0 и bn …b0 - постоянные коэффициенты; Y и Х - мгновенные значения информативного параметра изменения выходной и измеряемой величин. Таким образом, динамические характеристики определяют характер переходного процесса, протекающего в средстве измерений. Описание и порядок выполнения работыОбщие сведения.Изменение входного сигнала во времени может значительно повлиять на результаты измерений. Важными при этом являются, во-первых, характер изменения сигнала, т. е. его динамические свойства, и, во-вторых, «скорость реакции» средства измерений на входное воздействие, определяемая динамическими характеристиками этого средства. В таких случаях говорят о динамическом режиме средства измерений. При анализе динамического режима средств измерений оказывается весьма удобным рассматривать идеальные и реальные средства измерений, сопоставляя реакцию этих средств на одни и те же входные воздействия. Идеальные в динамическом смысле средства измерений СИи, иначе безынерционные, имеют, как правило, линейную зависимость выходного сигнала yи(t) от входного x(t): yи(t) = kнx(t), где kн – номинальный коэффициент преобразования. Очевидно, что в таких средствах измерений выходной сигнал во времени полностью повторяет входной с точностью до множителя kн. В реальных средствах измерений СИр выходной сигнал y(t) в силу указанных причин будет иметь более сложную зависимость от входного сигнала, в частности, описываемую дифференциальными уравнениями соответствующего порядка. 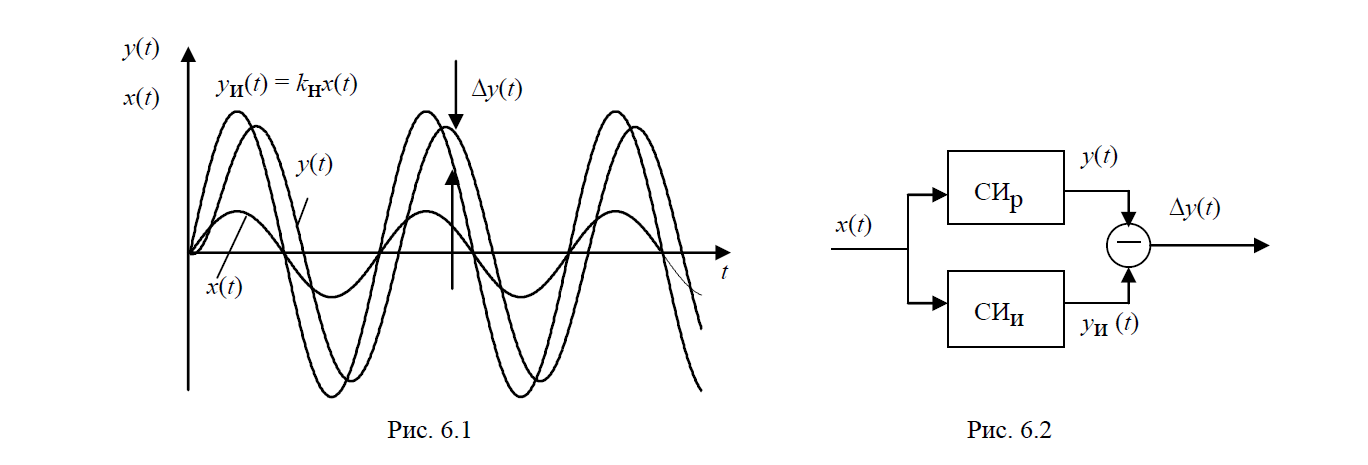 Разность между выходным сигналом y(t) реального средства измерений и выходным сигналом yи(t) (сигнал идеального средства измерений) при одном и том же входном Разность между выходным сигналом y(t) реального средства измерений и выходным сигналом yи(t) (сигнал идеального средства измерений) при одном и том же входномсигнале x(t) определяет динамическую погрешность по выходу реального средства СИр измерений: y(t) = y(t) – yи(t) (6.1) Рисунок 6.1 иллюстрирует возможный вариант входного x(t) и выходных yи(t), y(t) сигналов идеального и реального средств измерений и возникающую при этом динамическую погрешность y(t). На рис. 6.2 показана структурная схема, удобная для интерпретации и оценки возникающей динамической погрешности. Структурная схема лабораторной установки.Лабораторная установка состоит из трех основных блоков: унифицированной вертикальной стойки, включающей источники питания, генератор сигналов прямоугольной, синусоидальной и треугольной формы и измерительные приборы – цифровой частотомер и два цифровых вольтметра; двухканального электронно-лучевого осциллографа; специализированного горизонтального модуля, предназначенного для выполнения конкретной лабораторной работы – исследования динамического режима средств измерений. В специализированном горизонтальном модуле находится объект исследования – фильтр нижних частот (ФНЧ) 2-го порядка, в котором предусмотрена возможность дискретного изменения частоты собственных колебаний 4 положения, и коэффициента демпфирования (или степени успокоения) так же 4 положения. Различным сочетанием этих параметров достигается широкий диапазон изменения динамических характеристик объекта исследования. Ручки переключения соответствующих параметров установлены на лицевой панели пульта в правой верхней его части. Структурная схема лабораторной установки представлена на рис. 6.3, где ЭЛО – двухканальный электронно-лучевой осциллограф, имеющий вход по оси Z; приборы, установленные на вертикальном стенде: ГС – генератор сигналов прямоугольной, синусоидальной и треугольной формы, ЦВ1 и ЦВ2 – цифровые вольтметры, ЦЧ – цифровой частотомер; устройства, встроенные в горизонтальный пульт (на схеме обведены штриховой линией): ФНЧ – фильтр нижних частот, УВХ1 и УВХ2 – устройства выборки и хранения мгновенных значений напряжений входного и выходного сигналов ФНЧ соответственно, блок синхронизации («Синхронизация»), блок управления выборкой («Управление выборкой»). Управление временем выборки осуществляется двумя потенциометрами, установленными в нижней правой части передней панели модуля. Рекомендации по сборке схемы.При сборке принципиальной схемы, соответствующей структурной схеме (рис. 6.3), все связи реализуются двухпроводными линиями с соблюдением «земляных» зажимов. Входы Y1, Y2, Z осциллографа имеют коаксиальные кабели. 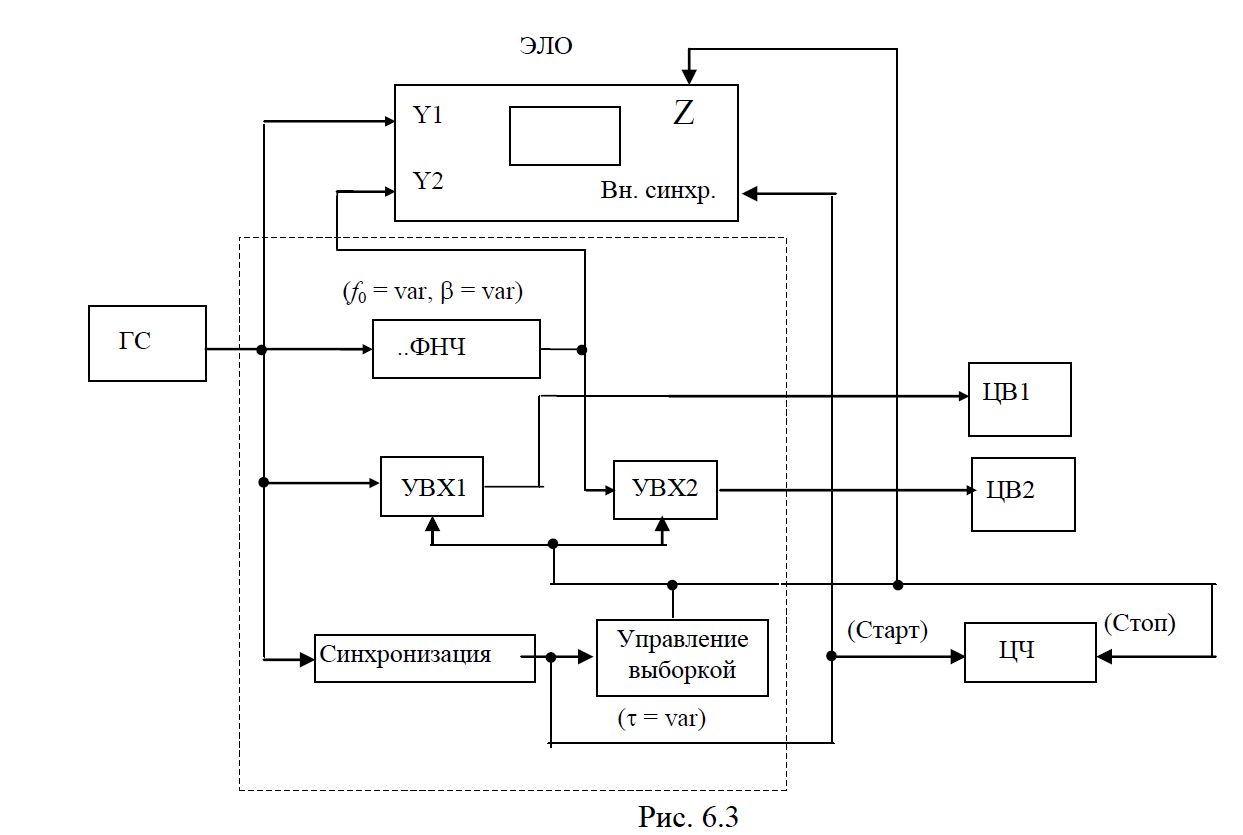 Перед проведением экспериментов необходимо совместить начальную установку лучей по обоим каналам осциллографа и установить одинаковые коэффициенты отклонений, удобные для визуального наблюдения. Установить коэффициент развертки, при котором на экране осциллографа наблюдается один период (или полупериод) входного сигнала. Перед проведением экспериментов необходимо совместить начальную установку лучей по обоим каналам осциллографа и установить одинаковые коэффициенты отклонений, удобные для визуального наблюдения. Установить коэффициент развертки, при котором на экране осциллографа наблюдается один период (или полупериод) входного сигнала.Принцип работы схемы и методические указания.Лабораторная установка позволяет одновременно наблюдать входные и выходные сигналы объекта исследования – фильтра нижних частот на экране двухканального осциллографа и измерять мгновенные значения напряжения этих сигналов в определенные моменты времени, устанавливаемые в процессе измерений. Таким образом, на установке реализуются дискретные измерения переменных во времени сигналов. Выходные сигналы генератора ГС используются как испытательные сигналы для ФНЧ, относительно которых реализуется общая синхронизация работы всей установки. Вид сигналов, их частота и амплитуда определяются заданием. Для визуального наблюдения входного и выходного сигналов ФНЧ эти сигналы подаются соответственно на входы Y1 и Y2 двухканального осциллографа, работающего в режиме внешней синхронизации. Для запуска развертки блоком «Синхронизация» при положительном фронте входного сигнала (см. также рис. 6.4) вырабатывается импульс синхронизации, который подается на вход «Вн. синхр» осциллографа и запускает генератор развертки. Этим достигается устойчивое изображение сигналов на экране при заданном моменте начала развертки, совпадающим с передним фронтом входного импульса. Фрагмент такого изображения, а также управляющие импульсы представлены на рис. 6.4. Измерение сигналов проводят в некоторые дискретные моменты времени. Выбор точек измерений проводится из соображений возможности восстановления непрерывных кривых сигналов, как, например, показано на рис. 6.4, где измерения проводятся в точках 1, 2, …, 7, определяющих экстремумы и точки пересечения кривых изображения сигналов. 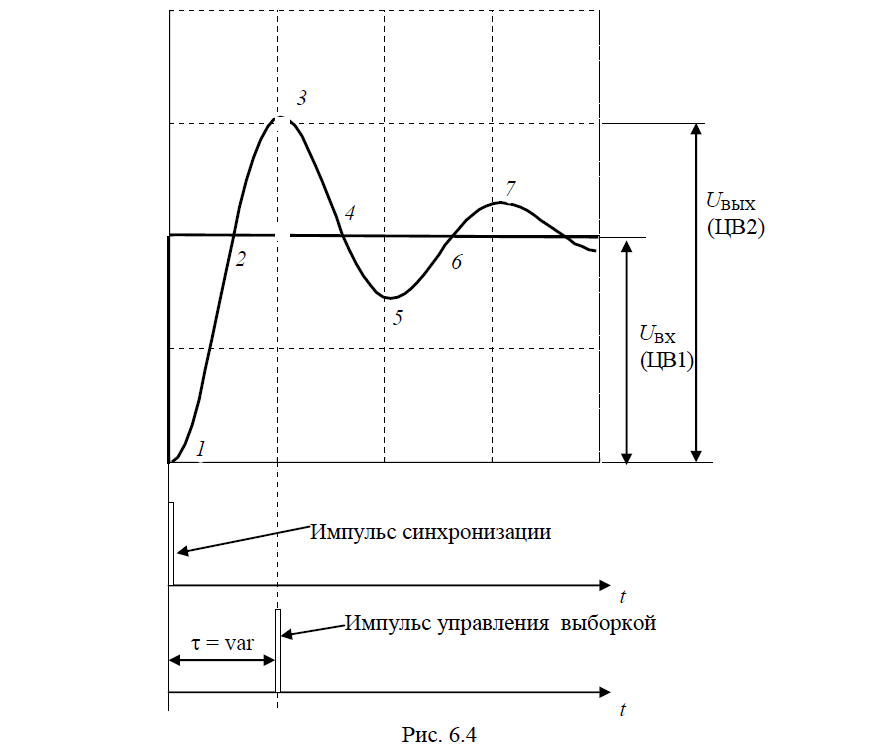 Момент времени измерений определяется импульсом управления выборкой, который вырабатывается блоком «Управление выборкой» с некоторой временной задержкой относительно импульса синхронизации. Величина этой задержки (var) регулируется вручную на пульте управления. Для визуального наблюдения положения импульса на осциллограмме этот импульс подается на вход Z осциллографа и запирает электронный луч, что Момент времени измерений определяется импульсом управления выборкой, который вырабатывается блоком «Управление выборкой» с некоторой временной задержкой относительно импульса синхронизации. Величина этой задержки (var) регулируется вручную на пульте управления. Для визуального наблюдения положения импульса на осциллограмме этот импульс подается на вход Z осциллографа и запирает электронный луч, чтонаблюдается в виде «пробела» на осциллограмме (см. т. 3 на рис. 6.4). Установленное время задержки измеряют цифровым частотомером ЦЧ в режиме измерения временного интервала при старт-стопном запуске. Измерение мгновенных значений напряжений осуществляется с помощью устройств выборки и хранения УВХ и цифровых вольтметров ЦВ, установленных в цепях входа (УВХ1, ЦВ1) и выхода (УВХ2, ЦВ2) ФНЧ. С приходом импульса управления выборкой в УВХ запоминается текущее мгновенное значение напряжения и сохраняется в течение достаточно большого времени, необходимого для измерения напряжения цифровым вольтметром ЦВ. Таким образом проводятся измерения входных uвхiи выходных uвыхiсигналов ФНЧ в выбранных дискретных точках ti, где ti– моменты времени измерения напряжений, отсчитываемые от импульса синхронизации. Результаты измерений по каждому эксперименту заносятся в таблицу. По полученным дискретным точкам строятся требуемые по заданию графики. Приводятся выводы по работе. Спецификация применяемых средств измерений
Обработка результатов экспериментаОпыт 1.1 Графики входного, выходного сигналов и динамической погрешности.  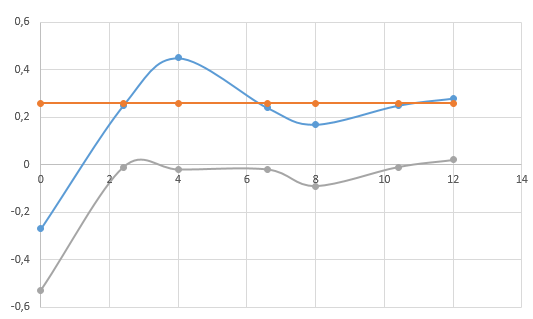 Опыт 2.1 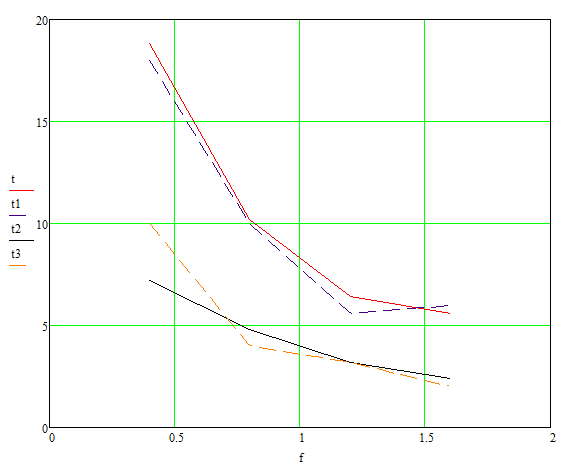 Зависимость времени Зависимость времени  установления выходного сигнала для различных частот установления выходного сигнала для различных частот  собственных колебаний при заданном коэффициенте демпфирования собственных колебаний при заданном коэффициенте демпфирования  Опыт 2.2 Зависимость времени установления выходного сигнала для различных коэффициентов  демпфирования при заданной частоте демпфирования при заданной частоте  собственных колебаний собственных колебаний 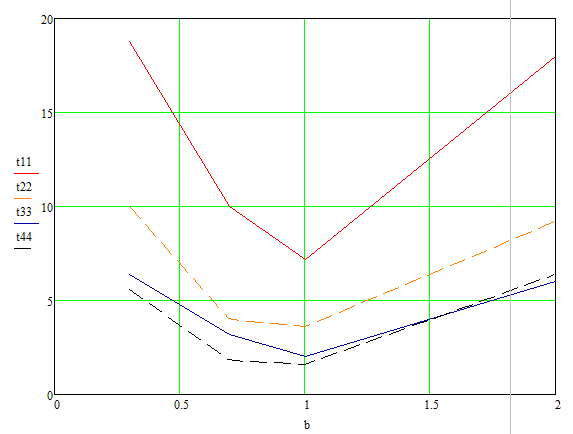 Опыт 3  Графики входного, выходного сигналов и динамической погрешности. Графики входного, выходного сигналов и динамической погрешности. 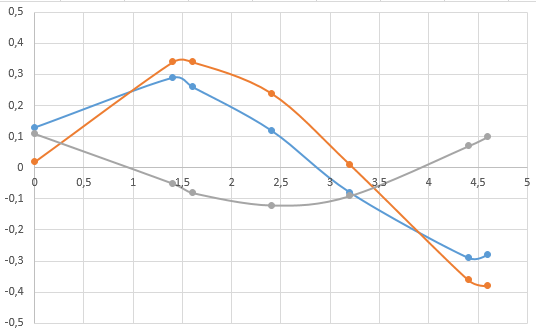 ВыводыВ ходе выполнения лабораторной работы мы изучали динамический режим средств измерений при синусоидальном входом воздействии и воздействии в виде единичного скачка. Нашли значение динамической погрешности ФНЧ при том и другом воздействии. При исследовании прохождения ступенчатого сигнала через ФНЧ выяснили, что при фиксированных частоте входного сигнала и коэффициенте демпфирования , с ростом собственной частоты ФНЧ время установления уменьшается; при фиксированных частоте входного сигнала и собственной частоте, время установления минимально при коэффициенте демпфирования равном 1 , при изменении в сторону уменьшения или увеличения от значения 1 коэффициента демпфирования , время установления увеличивается. Протокол лабораторной работы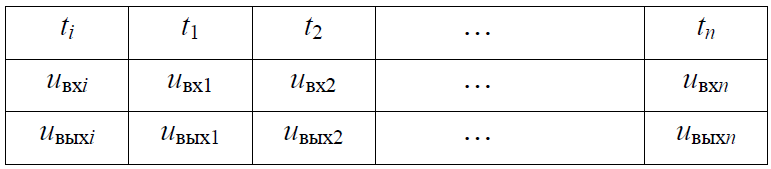 Дата : Выполнил : Исаков А.О. Преподаватель : Орлова Н.В. | |||||||||||||||||||||||||||||
 20В, 200В
20В, 200В



