Для получения зачета, в тетради 12 листов выполнить кинематический и силовой расчет привода конвейера. Подписать тетрадь Практическая работа.
 Скачать 338.34 Kb. Скачать 338.34 Kb.
|

|
Для получения зачета, в тетради 12 листов выполнить кинематический и силовой расчет привода конвейера. Подписать тетрадь «Практическая работа». Вариант выбрать по последней цифре зачетки. 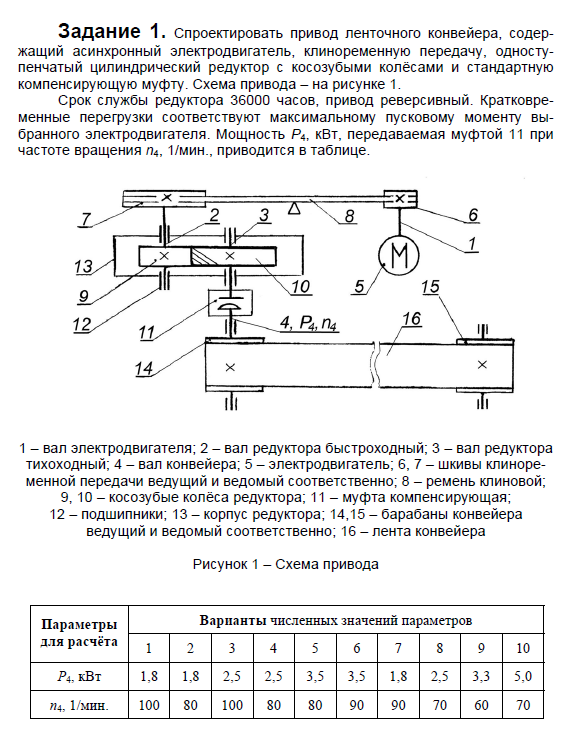 Пример оформления работы. Пошагово расписать ход решения практической работы. 1. Задание. Спроектировать привод ленточного конвейера, содержащий асинхронный электродвигатель, клиноременную передачу, одноступенчатый цилиндрический редуктор с косозубыми колёсами и стандартную компенсирующую муфту. Схема привода – на рисунке 1. Срок службы редуктора 36000 часов, привод реверсивный. Кратковременные перегрузки соответствуют максимальному пусковому моменту выбранного электродвигателя. М  ощность Р4 = 2,5 кВт, передаваемая компенсирующей муфтой 11, при частоте вращения ощность Р4 = 2,5 кВт, передаваемая компенсирующей муфтой 11, при частоте вращения n4 = 80об/мин.  1 – вал электродвигателя; 2 – вал редуктора быстроходный; 3 – вал редуктора тихоходный; 4 – вал конвейера; 5 – электродвигатель; 6, 7 – шкивы клиноременной передачи ведущий и ведомый соответственно; 8 – ремень клиновой; 9, 10 – косозубые колёса редуктора; 11 – муфта компенсирующая; 12 – подшипники; 13 – корпус редуктора; 14,15 – барабаны конвейера ведущий и ведомый соответственно; 16 – лента конвейера. Рисунок 1.1 – Схема привода. 2. Кинематический и силовой расчёт привода 2.1 Выбор электродвигателя.2.1.1 Требуемая мощность электродвигателя  , (2.1) , (2.1)где Р4 – мощность на компенсирующей муфте (на выходе привода), кВт; η – КПД привода. Здесь:  , (2.2) , (2.2)где ηР, ηЗ, ηп – соответственно КПД ременной, зубчатой передач, пары подшипников качения; η4 – КПД, учитывающий потери в опорах вала приводного барабана конвейера. Примечания. В формуле (2.2) принято, что КПД всех подшипников качения одинаковы. Руководствуясь рекомендациями /2, с.5/, принимаем ηР = 0,96; ηЗ = 0,97; ηп = 0,99; η4 = 0,99; После подстановки численных значений параметров в формулы (2.2) и (2.1), получим КПД привода:  и требуемую мощность электродвигателя  . .2.1.2 С учётом требуемой мощности Ртр = 2,77 кВт выбираем асинхронный двигатель трехфазный короткозамкнутый 4А100S4У3 серии 4А закрытый, обдуваемый, с номинальной мощностью Рном = 3,0 кВт, синхронной частотой вращения nс = 1500 об/мин, скольжением s = 4,4% и отношением пускового момента к номинальному  Вычисляем номинальную частоту вращения:  , (2.3) , (2.3) . .2.2 Передаточные отношения привода и отдельных его передач.Общее передаточное отношение привода при частоте вращения входного вала привода nдв = 1434 об/мин.  , (2.4) , (2.4)Расчёт по формуле (2.4) дает  Примем /2, с. 6/ передаточное отношение для зубчатой пары – iзб = 5. Тогда на долю клиноременной передачи остается передаточное отношение:  . .Проверка  убеждает в правильности вычислений. убеждает в правильности вычислений.2.3 Частоты вращения, угловые скорости, мощности и моменты на валах привода. 2.3.1 Частоты вращения валов.  – частота вращения на валу двигателя; – частота вращения на валу двигателя; – частота вращения вала шкива клиноременной передачи; – частота вращения вала шкива клиноременной передачи;  – частота вращения вала шестерни; – частота вращения вала шестерни; – частота вращения вала колеса; – частота вращения вала колеса; – частота вращения вала конвейера (выходного вала). – частота вращения вала конвейера (выходного вала).2.3.2 Угловые скорости валов.  – угловая скорость вращения на валу двигателя; – угловая скорость вращения на валу двигателя; – угловая скорость вращения вала шкива клиноременной передачи; – угловая скорость вращения вала шкива клиноременной передачи; – угловая скорость вращения вала шестерни; – угловая скорость вращения вала шестерни; – угловая скорость вращения вала колеса; – угловая скорость вращения вала колеса; – угловая скорость вращения вала конвейера (выходного вала). – угловая скорость вращения вала конвейера (выходного вала).2.3.3 Мощности на валах привода.  – мощность на валу двигателя; – мощность на валу двигателя; –мощность на быстроходном (ведущем) валу; –мощность на быстроходном (ведущем) валу; – мощность на тихоходном (ведомом) валу; – мощность на тихоходном (ведомом) валу; – мощность на валу конвейера. – мощность на валу конвейера.2.3.4 Вращающие моменты на валах привода.  – вращающий момент на валу двигателя; – вращающий момент на валу двигателя; – вращающий момент на быстроходном (ведущем) валу; – вращающий момент на быстроходном (ведущем) валу; – вращающий момент на тихоходном (ведомом) валу; – вращающий момент на тихоходном (ведомом) валу; – вращающий момент на валу конвейера (выходном валу). – вращающий момент на валу конвейера (выходном валу).2.3.5 Максимальный момент при перегрузке на валу двигателя (вал 1)  (см. пункт 2.1.3). (см. пункт 2.1.3).Номинальной мощности двигателя Рном = 3,0 кВт соответствует номинальный момент  . .Отсюда,  . .Очевидно, что при кратковременных перегрузках максимальные моменты на всех остальных валах будут превышать моменты, рассчитанные при передаче требуемой мощности (см. пункт 2.3.4) в  раза. раза.Исходя из этих соображений, получаем:  ; ; ; ; ; ; . .2.3.6 Результаты расчётов, выполненных в подразделе 2.3, сведены в таблице 2.1. Таблица 2.1 – Частоты вращения, угловые скорости, мощности и моменты навалах привода.
|