Лабораторна_5_модуль_2_Карпов,_Лесюк. Дослідження цифрового підрегулятора
 Скачать 75.09 Kb. Скачать 75.09 Kb.
|

|
ЛАБОРАТОРНА РОБОТА № 5 Тема:Дослідження цифрового ПІД-регулятора Мета: опанувати метод визначення раціональних параметрів налагодження ПІД-регулятора та дослідити показники якості роботи цифрової системи з цим регулятором Неперервна частина системи регулювання має передатну функцію  1.Визначаємо дискретну передатну функцію неперервної частини системи, до якої входить і фіксатор нульового порядку (за допомогою таблиць Z-перетворень або програми MATLAB): 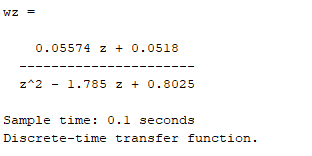 2. Коефіцієнт Ki визначаємо, виходячи із заданої добротності за швидкістю: 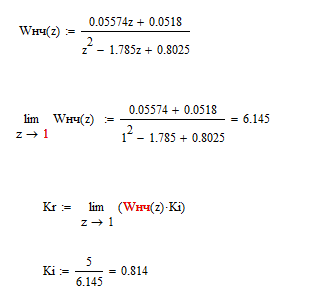 Звідси Кі = 0.814 3. Параметри K p і Kd визначаємо таким чином, щоб компенсувати два полюси дискретної передаточної функції неперервної частини системи. Для цього сформуємо систему рівнянь: 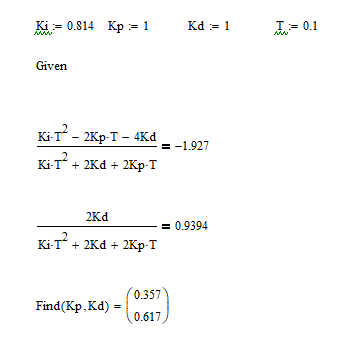 Тоді дискретна передаточна функція цифрового ПІД-регулятора буде  4. Створюємо модель цифрової системи з ПІД-регулятором в середовищі MATLAB/Simulink 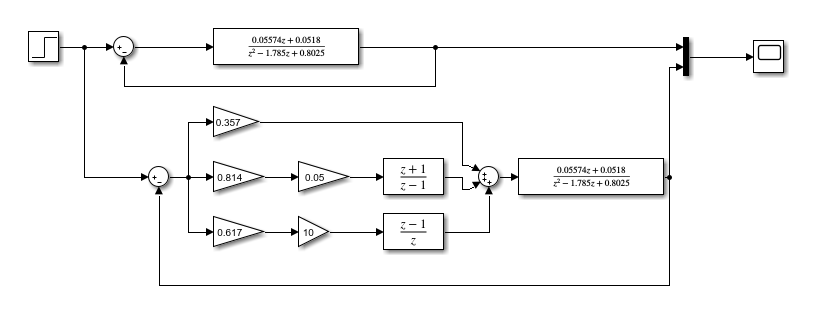 Simulink-модель цифрової системи з ПІД-регулятором 5. Будуємо перехідні процеси цифрових систем з ПІД-регулятором та з пропорційним регулятором з коефіцієнтом 1 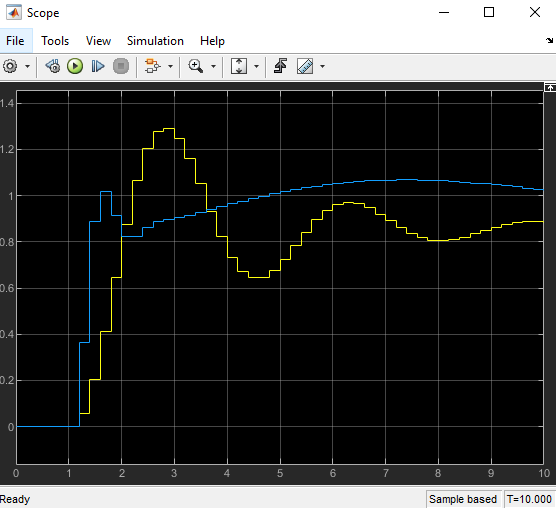 Перехідні процеси цифрової системи з ПІД-регулятором (верхній графік) і П-регулятором з коефіцієнтом 1 (нижній) Висновок: Я опанував метод визначення раціональних параметрів налагодження ПІД-регулятора та дослідити показники якості роботи цифрової системи з цим регулятором |