Электромеханические и регулировочные свойства электроприводов постоянного тока
 Скачать 49.59 Kb. Скачать 49.59 Kb.
|

|
Механические характеристики электродвигателей в двигательных режимах А.Электродвигателипараллельноговозбуждения. Схема дви- гателя постоянного тока параллельного возбуждения представлена на рис. 2.6, где Rр – регулировочный резистор в цепи якоря; Rв – ре- гулировочный резистор в цепи обмотки возбуждения LM. Направ- ления токов, показанные на схеме, соответствуют двигательному режиму работы, при котором электрическая энергия потребляется двигателем из сети с напряжением U и преобразуется в механиче- скую энергию, мощность которой равна Р = Мω, где ω – угловая скорость вращения двигателя. 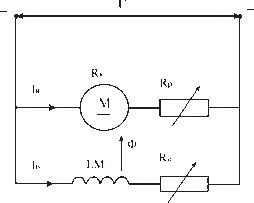 Рис. 2.6. Схема двигателя постоянного тока параллельного возбуждения Аналитическое выражение двигателя может быть получено из уравнения равновесия ЭДС, составленного для якорной цепи (см. рис. 2.6): U = Eа+ Iа(∑R +Rр), [В], (2.6) где Eа– ЭДС якоря двигателя; Iа– ток в цепи якоря; ∑R – сумма сопротивлений обмоток цепи якоря. В общем случае ∑R = Rа+ Rд + Rс + Rк , [Ом], (2.7) т.е. состоит из сопротивлений обмотки якоря Rа, обмотки доба- вочных полюсов Rд, последовательной обмотки возбуждения Rс и компенсационной обмотки Rк. При отсутствии в двигателе каких-либо из указанных обмоток в выражение (2.7) не входят соответствующие слагаемые. ЭДС обмотки якоря машины постоянного тока определяется формулой Е а рN 60а nФ Се nФ, [В], (2.8) где р – число пар полюсов; N – число проводников обмотки якоря; а– число пар параллельных ветвей обмотки якоря. Таким образом, Се= pN/60а– постоянная величина для данной машины. Подставляя в уравнение (2.6) значение ЭДС из формулы (2.8), после очевидных преобразований получим n U R Rp I , [об/мин]. (2.9) Cе Ф Се Ф а Из формулы электромагнитного момента машины постоянного тока рN. следует, что М 2 а IаФ СмIаФ, [нм] Ia M CмФ , А , где См – постоянная величина для данной машины; Ф – магнитный поток главных полюсов. Подставив значение тока Iав выражение (2.9), получим зависи- мость частоты вращения двигателя от электромагнитного момента n = f (M), т.е. выражение для механической характеристики двига- теля постоянного тока: n U RRp М n n , (2.10) Cе Ф Cе См Ф 2 где n U Cе.Ф , [об/мин] – частота вращения идеального холостого RRp хода двигателя; n Cе См Ф 2 М – изменение частоты вращения двигателя при заданных значениях нагрузки и сопротивления ре- гулировочного резистора в цепи якоря. С достаточной для практики степенью точности магнитный поток главных полюсов Ф в электродвигателях параллельного возбуждения можно считать величиной постоянной, не зависящей от нагрузки, если ток Iв обмотки возбуждения LM неизменен. Тогда механическая характеристика двигателя согласно уравнению (2.10) имеет прямолинейный характер (рис. 2.7). Механическая характеристика, снятая при номинальном напря- жении и при отсутствии резисторов в цепях якоря и возбуждения, является естественной. Рассмотрим далее искусственные механи- ческие характеристики, снятые при невыполнении этих условий. На рис. 2.7 приведены механические характеристики двигателя параллельного возбуждения с резисторами, включенными в цепь 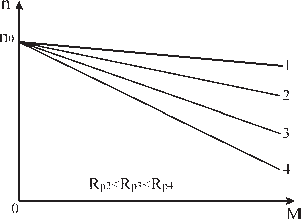 якоря. якоря.Рис. 2.7. Механические характеристики двигателя с параллельным возбуждением при изменении сопротивления Прямая 1 (Rр1= 0) соответствует естественной характеристике. Характеристики 2, 3, 4 сняты, соответственно, с резисторами Rр2, Rр3, Rр4. При этом сопротивления Rр2 < Rр3 < Rр4. Таким образом, увеличение сопротивления цепи якоря при неизменных значениях напряжения и тока возбуждения приводит к увеличению наклона механической характеристики, т.е. уменьшению ее жесткости. Все характеристики при этом будут пересекаться в одной точке n0 на оси ординат, так как частота вращения идеального холостого хода от значения сопротивления цепи якоря не зависит. Изменение магнитного потока Ф при U = const и ∑R + R = const, согласно выражению (2.10), приводит к изменению как частоты вращения идеального холостого хода двигателя, так и наклона механической характеристики по отношению к оси абсцисс, т.е. величины ∆n. С уменьшением магнитного потока Ф, что достигается введени- ем в цепь обмотки возбуждения резистора Rв, частота вращения n0 возрастает, а наклон механической характеристики увеличивается, т.е. жесткость ее снижается. Прямые 1, 2, 3 на рис. 2.8 являются механическими характеристиками двигателя, снятыми соответст- венно при значениях магнитных потоков Ф1 > Ф2 > Ф3 . 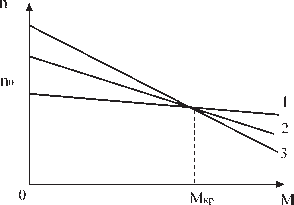 Рис. 2.8. Механические характеристики двигателя с параллельным возбуждением при изменении магнитного потока Изменение напряжения U на зажимах цепи якоря двигателя при неизменных значениях магнитного потока Ф и сопротивления цепи якоря ведет, согласно уравнению (2.10), к изменению часто- 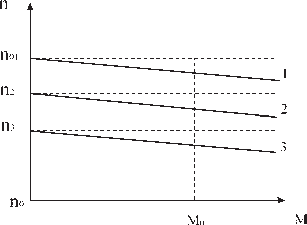 ты вращения идеального холостого хода двигателя при неизменной жесткости механических характеристик. Прямые 1, 2 и 3 на рис. 2.9 являются механическими характеристиками, снятыми при напря- жениях на зажимах цепи якоря соответственно U1 > U2 > U3. ты вращения идеального холостого хода двигателя при неизменной жесткости механических характеристик. Прямые 1, 2 и 3 на рис. 2.9 являются механическими характеристиками, снятыми при напря- жениях на зажимах цепи якоря соответственно U1 > U2 > U3.Рис. 2.9. Механические характеристики двигателя с параллельным возбуждением при изменении напряжения Б. Электродвигатели последовательного возбуждения. Схема двигателя последовательного возбуждения представлена на рис. 2.10. В этом двигателе ток возбуждения равен току якоря (I |