Электромеханические и регулировочные свойства электроприводов постоянного тока
 Скачать 49.59 Kb. Скачать 49.59 Kb.
|

|
в= Iа), поэтому магнитный поток Ф является некоторой функцией тока якоря. При токе якоря Iа < (0,8 – 0,9)Iаном, когда магнитная цепь машины не насыщена Ф = α Iа, причем коэффициент пропорциональности α с достаточной степенью точности можно принять величиной постоянной. 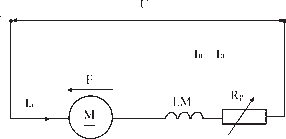 Рис. 2.10. Схема двигателя постоянного тока последовательного возбуждения При дальнейшем возрастании тока якоря и, следовательно, тока возбуждения происходит насыщение магнитной цепи машины, поэтому магнитный поток Ф растет медленнее, чем ток Iа, а при больших нагрузках, когда Iа> Iаном, можно принять, что Ф = const. Для линейного участка зависимости Ф = f (Iа) можно записать, что а М = См Ф Iа= См α I 2 = с Ф2, где с = См/α. Тогда уравнение механической характеристики для двигателя последовательного возбуждения запишется в виде n U Cе RRp, [об/мин]. (2.11)   Cе CеПри U = const и Rр = const, получим  n б,[об/мин], (2.12) n б,[об/мин], (2.12)где C  a= a= е ; б= R R p . Cе Уравнение (2.12) представляет собой гиперболу. Напомним, что эта зависимость имеет место лишь при ненасыщенной машине, т.е. при малых нагрузках. В случае больших нагрузок машина насыща- ется, магнитный поток Ф становится практически неизменным и механическая характеристика принимает линейную зависимость. Если Rр1 = 0, то при номинальном напряжении получим есте- ственную механическую характеристику (кривая 1 на рис. 2.11). Теоретически частота вращения идеального холостого хода двигателя (М = 0) равна бесконечности. Реальная частота вращения холостого хода ввиду наличия меха- нических потерь и магнитного потока остаточного намагничивания ограничена, но она в 5–6 раз превышает номинальное значение. 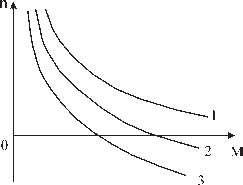 Рис. 2.11. Механические характеристики двигателя с последовательным возбуждением при изменении сопротивления По условиям механической прочности машины такая частота вращения недопустима, поэтому двигатель последовательного возбуждения нельзя пускать без нагрузки, а также нельзя снижать нагрузку во время работы менее, чем на 15–20% от номинального значения. В случае одинаковых пусковых токов якоря пусковой момент двигателя последовательного возбуждения будет больше, чем у двигателя параллельного возбуждения, поскольку у первого при этом оказывается большим магнитный поток. Изменение сопротивления цепи якоря приводит к изменению жесткости механических характеристик (см. рис. 2.11): с увели- чением сопротивления резистора Rр жесткость характеристик уменьшается, что приводит к снижению частоты вращения и пу- скового момента электродвигателя. Если Мс = const, то снижение частоты вращения пропорционально увеличению сопротивления цепи якоря двигателя. Изменение напряжения сети также вызывает изменение жест- кости механических характеристик, частоты вращения и пускового момента электродвигателя. При снижении напряжения сети жест- кость механических характеристик и пусковой момент двигателя снижаются. Изменение магнитного потока двигателя можно осуществить шунтированием обмотки возбуждения LM резистором Rш (рис. 2.12). |