йуйц. Электропривод планшайбы карусельного станка
 Скачать 0.89 Mb. Скачать 0.89 Mb.
|

|
ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ Студент: Шаповалов В. В. Группа 9405 Тема работы: Электропривод планшайбы карусельного станка Исходные данные:  Максимальная скорость поворота стола – 20 град/с, Максимальное угловое ускорение – 5 град/с2, передаточное число редуктора – 400. Статический момент на валу механизма редуктора: силы резания 300 Н, сил трения – 160 Н*м Момент инерции планшайбы с механической частью привода станка на валу механизма редуктора– 1000 кг*м2. Назначения системы управления: В автоматическом режиме вращать планшайбу станка с заданной скоростью Задание скорости планшайбы в автоматическом режиме выполняется от моторного (цифровым) потенциометром от кнопок Больше», «Меньше». Задание скорости планшайбы в ручном режиме выполняется от резисторного потенциометра на панели поста управления Выполняется контроль перегрузки двигателя по моменту Элементы поста управления: Световая сигнализация «Сеть», «Работа», «Авария», «Момент двигателя больше 80%», Ключ режима регулирования «Автоматический/Отключено/Ручной», Кнопки «Вперед», «Назад», «Стоп» для пуска в автоматическом режиме, Кнопки «Вперед», «Назад», «Стоп» для пуска в ручном режиме, Кнопка «Аварийная остановка» (отдельный пост аварийной остановки), Кнопки «Больше», «Меньше» для задания скорости в режиме автоматического управления. Стрелочный прибор 0…20 мА для отображения момента двигателя, Резисторный потенциометр для задания скорости вращения планшайбы. Дополнительное оборудование привода: Датчикобратнойсвязи по скорости – тахогенератор. Защиты: При обрыве цепи сигнала датчика скорости – аварийная остановка, Защита от заклинивания электродвигателя – аварийная остановка, Защита от перегрева электродвигателя – предупреждение, Защита от обрыва муфты (недогрузки) электродвигателя – аварийная остановка. 1. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ И ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ. 1.1. Расчет скорости и ускорения вала двигателя. Определим требуемую скорость вращения вала двигателя. Дана максимальная скорость поворота планшайбы станка, переведем ее в об/мин и определим скорость вращения вала редуктора на стороне механизма: За одну минуту планшайба станка При скорости  планшайба станка сделает один поворот за 360/20 =18 секунд, тогда планшайба станка сделает один поворот за 360/20 =18 секунд, тогда Скорость вращения вала двигателя определю через передаточное отношение редуктора:  – передаточное число редуктора – передаточное число редуктора Тогда синхронная скорость вращения двигателя:  Дано максимальное угловое ускорение планшайбы станка. Найдем ускорение вращения вала редуктора на стороне механизма: 5 град/c2 × π/180 = 0,08727 рад/c2  Ускорение вращения вала двигателя определю через передаточное отношение редуктора  1.2. Расчет статического момента приведенного к валу двигателя. Статический момент на валу механизма приводится к валу двигателя с учетом передаточного числа редуктора; силы резания и трения.  1.3. Расчет момента инерции механизма приведенного к валу двигателя. Момент инерции механизма задается с учетом всех вращательно и поступательно двигающихся масс всего объекта. Затем момент инерции механизма приводится к валу двигателя.  - момент инерции вращательно движущихся элементов механизма на валу механизма редуктора. - момент инерции вращательно движущихся элементов механизма на валу механизма редуктора. – момент инерции на валу двигателя – момент инерции на валу двигателя1.4. 4. Предварительный расчет мощности и выбор двигателя. Для первичного выбора двигателя вычисляется динамический момент только с учетом инерции механизма и требуемого углового ускорения, приведенных к валу двигателя.   = 190,9 Вт = 190,9 ВтПосле первичного выбора двигателя выполняется проверочное повторное вычисление динамического момента учетом инерции механизма, приведенного к валу двигателя, момента инерции выбранного двигателя и требуемого углового ускорения вала двигателя. Выбран двигатель с минимальной мощностью 0,25 кВт 4АА63А4УЗ   - момент инерции выбранного двигателя - момент инерции выбранного двигателяРасчет мощности после первичного подбора двигателя      Вторичный расчет подтвердил целесообразность выбора двигателя 4АА63А4УЗ Таблица 1 – параметры выбранного двигателя
1.5 Расчет параметров двигателя. Синхронная частота вращения: 0 = π*n0/30 = (π*1500)/30 = 157 рад/с Номинальная скорость вращения: nном = (1-Sн)*n0 = (1-0,08)*1500= 1380 об/мин Номинальная частота вращения: ном = (1-Sн)*0 = (1-0,08)*157 = 144,44 рад/с Номинальный момент: Мдвном = Рдвном/двном = 250/144,44 = 1,73 Н*м Номинальный ток:  Iн = 250/(1.73*380*0,68*0,65) = 0,86 А Критический момент: Мкр = mк*Мдвном = 2,2*1,73 = 3,806 Н*м Момент инерции привода: Jприв = Jнас = 1,3*Jдв = 1,3*0,0012= 0,00156 кг*м2 Результаты расчетов представлены в таблице 1.3. Таблица 1.3 – Выбранный преобразователь частоты
1.6 Выбор преобразователя. В курсовой работе предлагается применить преобразователь частоты фирмы VACON серии NX, имеющий широкий мощностной ряд, типовой состав параметров и подробное техническое описание для первичного ознакомления. Номинальные ток и мощность преобразователя частоты должны быть не меньше номинальных тока и мощности двигателя. Допустимая кратковременная перегрузка по току преобразователя частоты для приводов с переменной нагрузкой 150%. Таблица 1.4 – Выбранный преобразователь частоты
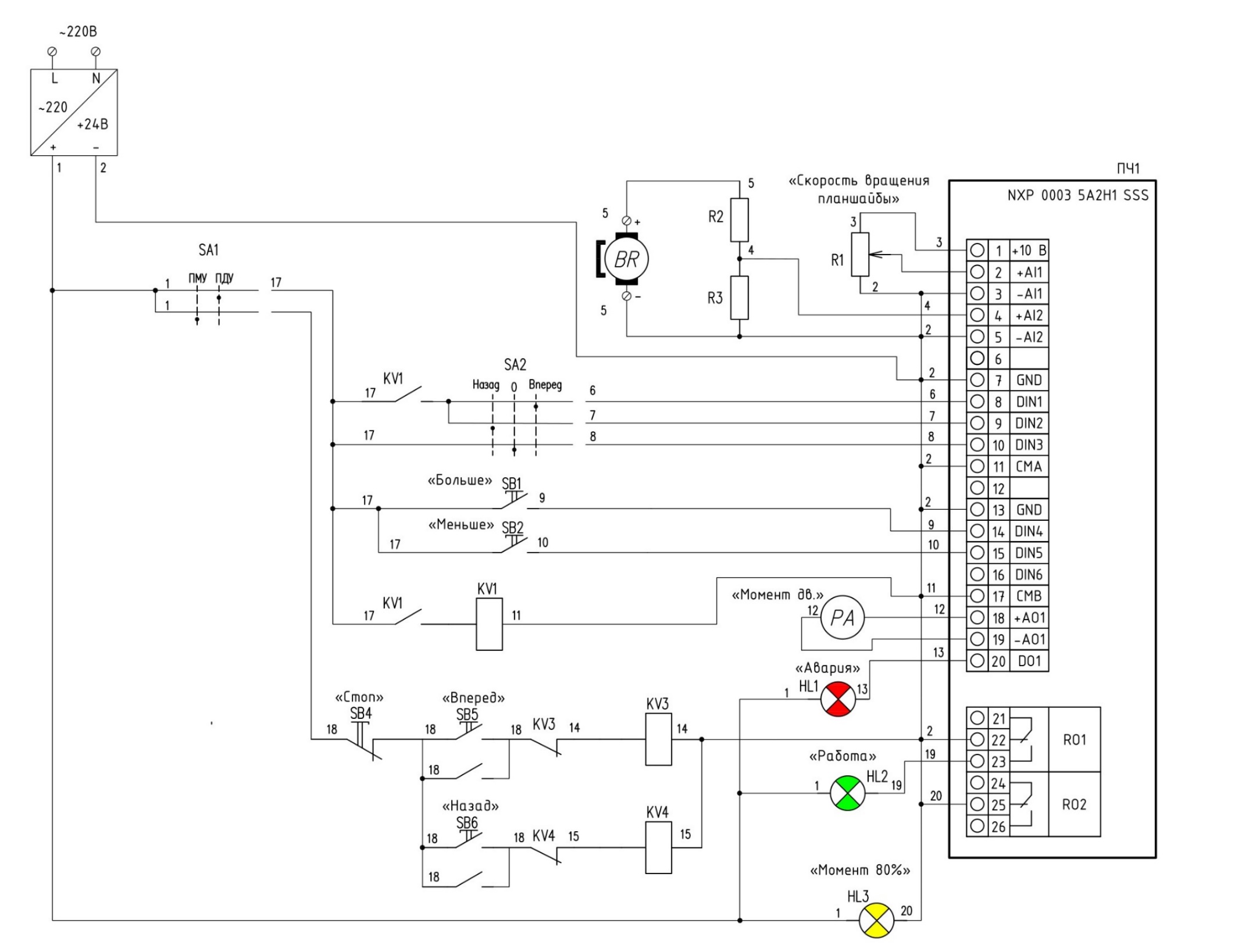
2. РАЗРАБОТКА СХЕМЫ УПРАВЛЕНИЯ 2.1 Разработка схемы управления Схема разработана в соответствии с методическими указаниями1 и добавлена в приложение А. 2.2 Выбор тахогенератора. Для получения данных о скорости электродвигателя был выбран тахогенератор серии МЭТ, которая используется в станках; обладает малой асимметрией и нелинейностью характеристик. Таблица 2 – Технические характеристики тахогенератора.
В данном случае тахогенератор является активным элементом и не требует источника питания, но напряжение, которое он вырабатывает, значительно выше 10 В, поэтому, между тахогенератором и аналоговым входом ПЧ ставится делитель напряжения на резисторах R2 и R3. Выбранные резисторы: R1 = 12 Ом, R2 = 5 Ом, тогда даже при максимальном напряжении тахогенератора (31 В), выходное напряжение не превысит 10 В. 3. НАСТРОЙКИ ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ. Таблица 3.1 – Настройки, связанные с принципиальной электрической схемой управления
Таблица 3.2 – Настройки структуры системы управления ПЧ
Таблица 3.3 – Настройки, связанные с дискретными выходами
Таблица 3.3.1 – Настройки, связанные с дискретными входами
Таблица 3.4 – Настройка работы электродвигателя от ПЧ
Таблица 3.4 – Номинальные данные и режимы работы электропривода
Таблица 3.5 – Защиты ПЧ и электропривода
Таблица 3.6 – Защиты ПЧ и электропривода
Таблица 3.7 – Технологические функции управления
4. ОБЩАЯ СТРУКТУРНАЯ СХЕМА САУ 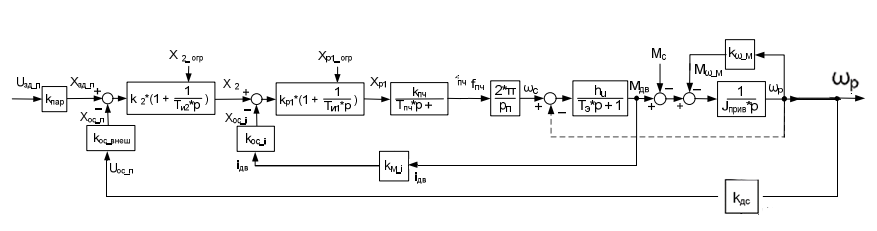 Рисунок 1 – Электропривод механизмов с внешним контуром управления по скорости Рисунок 1 – Электропривод механизмов с внешним контуром управления по скорости4.1 Коэффициенты электропривода и элементов управления приводом. Коэффициент жесткости механической характеристики асинхронного двигателя:  Коэффициент передачи тока двигателя от его нагрузки:  Электрическая постоянная АД:  Коэффициент передачи момента сил вязкого трения от его скорости вращения:  Коэффициент передачи тахогенератора вместе с делителем напряжения определяется как отношение выходной величины:  Таблица 4 – Коэффициенты электропривода
4.2 Коэффициенты преобразователя частоты. Постоянная времени ПЧ:  Коэффициент передачи ПЧ:  Коэффициент входа обратной связи по току:  Коэффициент входа обратной связи внешнего контура:  Коэффициент параметра на входе задания:  Таблица 4 – Коэффициенты ПЧ
5. Настройка регуляторов системы автоматического управления. 5.1. Настройка контура тока. В контур добавлен пи-регулятор. Так же контур настраиваем на оптимум по модулю. |
 ,
, ,
, ,
, ,
, ,
, ,
,
 ,
,





















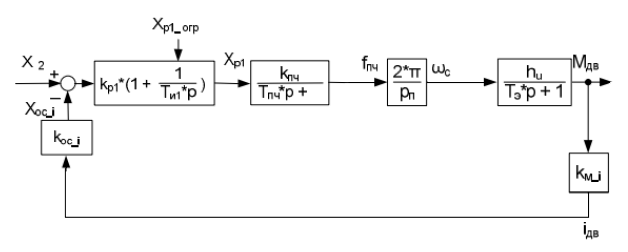





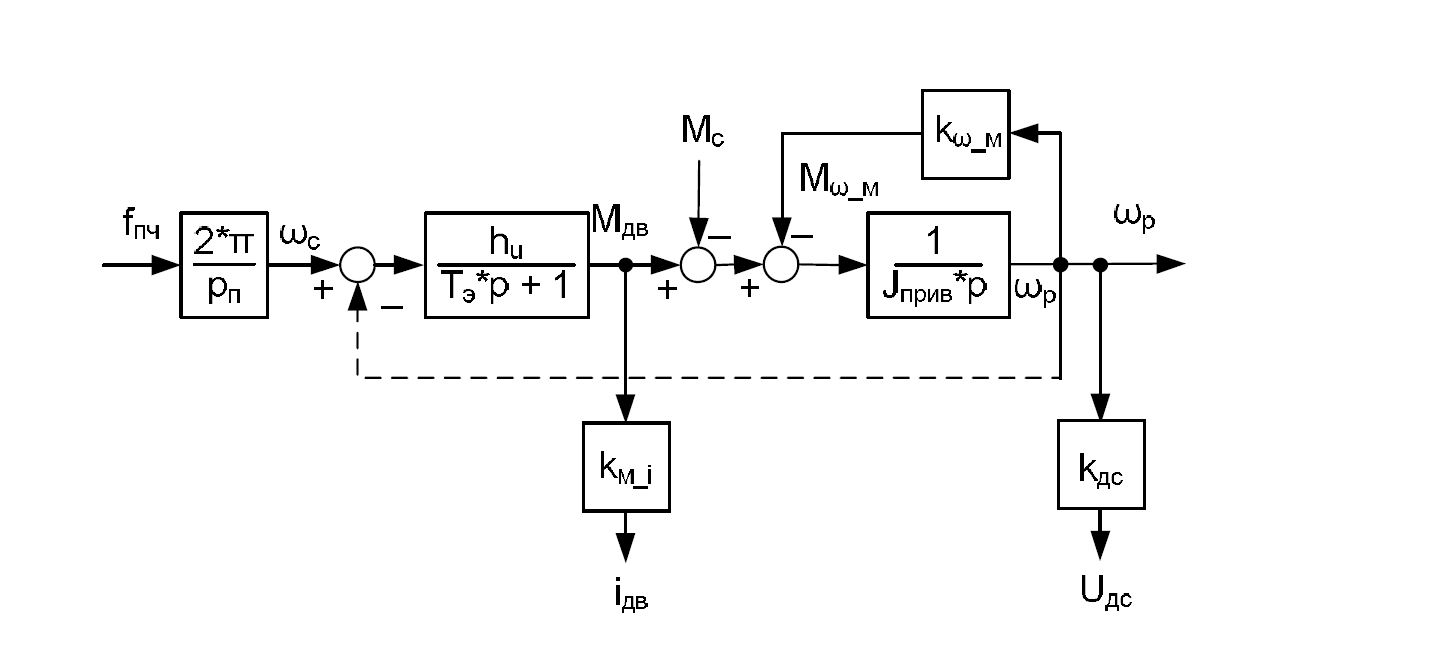 Рисунок 1 – Электропривод механизмов с внешним контуром управления по скорости
Рисунок 1 – Электропривод механизмов с внешним контуром управления по скорости