Валерьевич (3). Федеральное агентство морского и речного транспорта
 Скачать 0.74 Mb. Скачать 0.74 Mb.
|

|
ФЕДЕРАЛЬНОЕ АГЕНТСТВО МОРСКОГО И РЕЧНОГО ТРАНСПОРТА ФгБОУ ВО «СИБИРСКИЙ ГОСУДАРСТВЕННый УНИВЕРСИТЕТ ВОДНОГО ТРАНСПОРТА» СТРУКТУРНОЕ ПОДРАЗДЕЛЕНИЕ СПО НОВОСИБИРСКОЕ КОМАНДНОЕ РЕЧНОЕ УЧИЛИЩЕ ИМЕНИ С.И. ДЕЖНЕВА   Утверждаю Заместитель начальника по УР Изотова Е.Г Подпись Ф.И.О. « » 2022 г МОДЕРНИЗАЦИЯ ЭЛЕКТРОПРИВОДА ЯКОРНО-ШВАРТОВНОГО УСТРОЙСТВА СУДНА ПРОЕКТА 758 Пояснительная записка ДР26.02.06.02РПЗ Курсант гр. ЭМ -41 Бухтуев.Г.В «___» ___________ 20_____ Руководитель Огнева.Н.Г «___» ___________ 20_____ ___________________________ 2022 Содержание Введение 4 1 Проект судна и технические данные 5 1.1 Общие сведения об якорно-швартовном устройстве 7 1.2 Требования Российского Речного Регистра к якорно-швартовным механизмам 8 2 Расчет якорно-швартовного устройства и схемы управления 10 2.1 Расчет и выбор электродвигателя брашпиля 12 2.2 Выбор схемы управления 17 2.4 Выбор кабеля и условия прокладки 26 3 Техническое обслуживание и техническая эксплуатация электромеханической системы якорно-швартовного устройства 27 4 Основные положения правил электробезопасного обслуживания электромеханической системы якорно-швартовного устройства 30 Список литературы 34 Введение 4 1 Проект судна и технические данные 6 1.1 Общие сведения о якорно-швартовном устройстве 7 1.2 Требования Российского Речного Регистра к якорно-швартовным механизмам 8 2 Расчет якорно-швартовного устройства и схемы управления. 11 2.1 Расчет и выбор электродвигателя брашпиля 12 2.2 Выбор схемы управления 17 2.3 Выбор аппаратуры 23 2.4 Выбор кабеля и условия прокладки. 27 3 Техническое обслуживание и техническая эксплуатация электромеханической системы якорно-швартовного устройства 28 4 Основные положения правил электробезопасного обслуживания электромеханической системы якорно-швартовного устройства 31 Заключение 33 Список литературы 35 ВведениеБуксиры-толкачи проекта 758 строились в шестидесятых годах, поэтому все оборудование на них морально и физически устарело. Однако сами суда до сих пор еще эксплуатируются, и будут эксплуатироваться Достаточно долгое время. [6] В связи с физическим старением электрооборудования его приходится часто ремонтировать, что уменьшает полезное время нахождения судна в эксплуатации. Это ведет к большим экономическим потерям от недоиспользования таких мощных судов, к тому же затраты на ремонт постоянно растут. Следует иметь в виду еще то, что установленное по проекту на судне оборудование в большинстве своем промышленностью больше не выпускается. Поэтому вопрос замены устаревшего электрооборудования на новое в настоящее время можно считать актуальным. Такая замена не будет эффективной, если одновременно не изменять и сами системы управления электроприводами. Наиболее целесообразным следует считать применение в настоящее время систем управления приводами с использованием тиристоров, имеющих высокие быстродействие, надежность и хорошие энергетические показатели. Целью настоящего проекта является модернизация системы управления электроприводом якорно-швартовного устройства буксира-толкача, как наиболее ответственного палубного механизма. Привод швартовного механизма должен быть способен создавать усилие не менее двукратного номинального тягового усилия в течении 15 с. Внешние силы, действующие на судно. Воздействие ветра и течения на судно вызывает основную нагрузку на якорную цепь при стоянке и определяет статический момент сопротивления на валу электродвигателя в процессе съемки с якоря, когда судно подтягивается к месту заложения якоря. На стоянке при совпадении по направлению ветра и течения возникает наибольшее воздействие внешних сил на судно и обобщенная сила для винтовых судов определяется арифметической суммой трех составляющих. Перед каждым выходом в море якорное устройство должно быть проверено старшим помощником.Швартовное устройство должно обеспечивать легкое и быстрое проведение работ по швартовке судна. Отдельные части его должны быть правильно расположены и обладать прочностью, обеспечивающей крепление судна у причальной линии, ручные швартовные механизмы (шпили, лебедки) должны иметь исправные и надежно действующие стопорные приспособления, не допускающие произвольного стравливания швартовов при их выбирании.[9] 1 Проект судна и технические данныеО 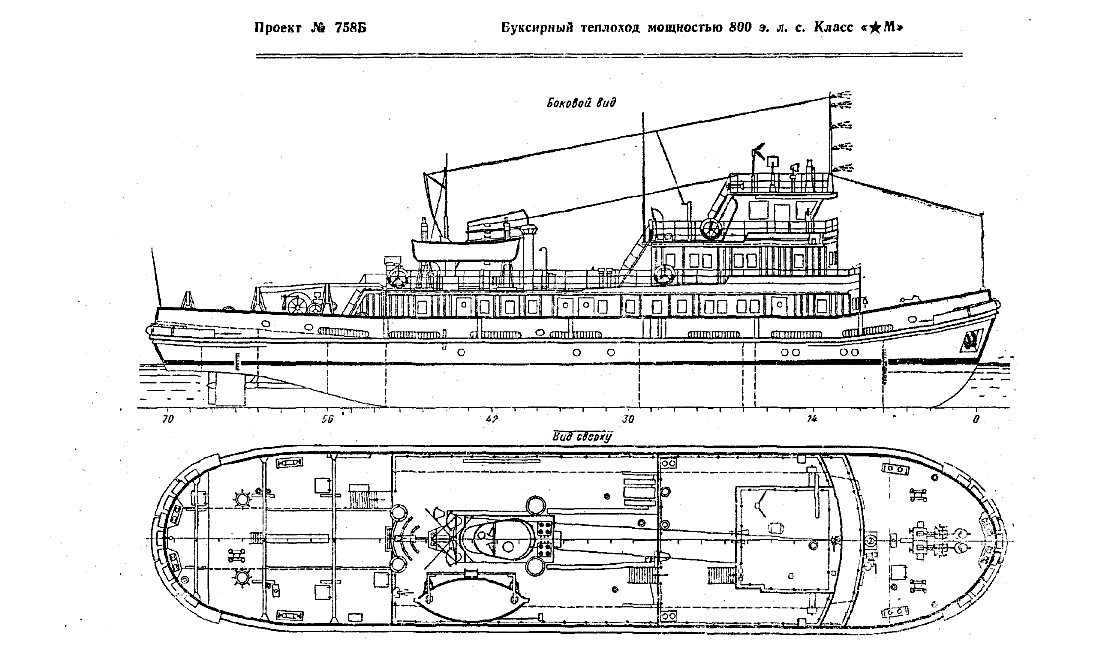 днопалубный двухвинтовой буксир с рубками на главной, шлюпочной и верхней палубах. Предназначен для толкания и буксировки состав и барж на реках Сибири (Обь, Иртыш, Енисей), озере Байкал. Продолжение серии буксиров-толкачей проекта 758А, 758АМ, 758АН. Рисунок 1- Судно проекта 758Б Характеристики: Длина: 40,6 м Ширина: 8,6 м Высота борта: 3,2 м Высота габаритная: 11,5 м Водоизмещение в грузу: 400 т Осадка в грузу нос/корма: 2,00 / 2,06 м Водоизмещение порожнем (с экипажем и 10% запасов): 334 т Осадка средняя порожнем нос/корма: 1,28 / 2,25 м Мест для экипажа: 9 Автономность: 15 сут Скорость: 19,5 км/ч Тип ГД: дизель 6NVD48U Мощность ГД: 2х294 кВт Тип ДГ: ДГА50-9 (дизель 6Ч12/14, генератор МСК83-4) Мощность ДГ: 2х50 кВт 1.1 Общие сведения об якорно-швартовном устройствеЯкорное устройство обеспечивает стоянку судна на свободной воде; его швартовку кормой к причалу; быстрое погашение инерции хода судна, предотвращающее навал на причальное сооружение или другое судно; постановку судна на шпринг; снятие судна с мели собственными силами и средствами.[8] Якорное устройство состоит из якорей, якорных канатов, бортовых и цепных палубных клюзов, цепных ящиков, стопоров и палубного механизма Якоря, удерживающие судно на определенном месте от сноса ветром и течением, называются становыми. Якорем, обладающим большой держащей силой, является адмиралтейский якорь; его недостаток — сложность уборки после подъема. Кроме того, одна из лап адмиралтейского якоря, торчащая из грунта, представляет подводную опасность. Брашпили и шпили служат для подъема якорей; они бывают ручные, паровые и электрические. Тяговое усилие на звездочке этих механизмов должно превышать вес якоря в пять раз. Для закрепления якорей по-походному, помимо ленточных стопоров, имеющихся у брашпилей и шпилей, на палубе устанавливают постоянные и переносные стопора. Правила технической эксплуатации якорного и швартовного устройств. Якорное устройство должно удовлетворять следующим основным требованиям: - обеспечить при всех условиях плавания быструю, легкую, удобную отдачу и подъем якорей, а также надежную стоянку на них судна; - число и вес якорей, калибр и длина якорных цепей должны соответствовать размерам, назначению и району плавания судна и отвечать требованиям Правил Российского Речного Регистра; - обеспечить одновременный подъем двух якорей с глубины не менее 45 м (без отрыва от грунта) со средней скоростью не менее 8 м/сек; скорость подъема каждого якоря в отдельности должна- быть не менее 12 м/сек; - стопоры должны обеспечить быструю отдачу якорей, крепить якоря по-походному прочно и надежно. [9] 1.2 Требования Российского Речного Регистра к якорно-швартовным механизмамТребования к якорно-швартовным механизмам и его приводу излагаются в действующих Правилах Российского речного Регистра, которые издаются каждые пять лет. Согласно Правил, для отдачи и подъема якорей массой 50 кг и более, а также удержания судна на якорной стоянке должен быть установлен шпиль или брашпиль. При массе якоря 150 кг и более на этих механизмах должны быть звёздочки. На буксирах-толкачах всех классов до 590 кВт включительно, оборудованных буксирными лебёдками, допускается замена якорных цепей стальными канатами в кормовом якорном устройстве и использовать в качестве механизма подъема якоря буксирные лебёдки. На малых судах при применении вместо цепей канатов, разрешается установка якорных лебёдок. На самоходных судах длиной более 60 м, несамоходных толкаемых судах, предназначенных для перевозки воспламеняющихся жидкостей, и толкачах, тормоза механизмов подъёма якорей должны быть оборудованы устройством дистанционной отдачи якоря, исключающим самопроизвольную отдачу якоря. Устройства дистанционной отдачи якорей должны обеспечивать: управление из рулевой рубки (на несамоходных судах - из рулевой рубки толкача) отдачей правого носового, а для толкачей и кормового якоря; возможность остановки из рулевой рубки якорной цепи при любой вытравленной её длине, продолжительность отдачи якоря не более 15 с, с момента включения дистанционного управления отдачей якоря. Стопоры и другое якорное оборудование, для которого предусматривается дистанционное управление, должны иметь местное ручное управление. Конструкция якорного оборудования и узлов его местного ручного управления должны обеспечивать нормальную работу при выходе из строя отдельных узлов или всей системы дистанционного управления. Привод якорно-швартовных механизмов должен соответствовать следующим требованиям: -Мощность привода якорно-швартовного механизма должна обеспечивать подтягивание судна к якорю, отрыв и подъём любого из якорей со скоростью не менее 0,12 м/с при номинальном тяговом усилии на звёздочке F1, H F1 = 22,6 ∙ m d2 где m - коэффициент прочности, принимаемый равным 1,0 - для цепей с распорками; 0,9 - для цепей без распорок. - Привод должен обеспечивать выбирание якорной цепи с указанной скоростью и тяговым усилием F1 в течение не менее 30 минут без перерыва, а также спуск одного якоря на расчетную глубину якорной стоянки.Пусковой момент привода якорного механизма должен создавать тяговое усилие на звёздочке при неподвижной якорной цепи не менее 2F1. -Привод якорного механизма должен обеспечивать одновременный подъем свободно висящих якорей с половины расчётной глубины якорной стоянки. При подходе якоря к клюзу привод должен обеспечивать скорость выбирания цепи не более 0,12 м/с. Привод швартовного механизма должен обеспечивать непрерывное выбирание швартовного каната при номинальном тяговом усилии с номинальной скоростью не менее 30 минут. Скорость выбирания швартовного каната, как правило не должна превышать 0,3 м/с при номинальном тяговом усилии. Кроме того должна быть обеспечена возможность выбирания каната со скоростью не более 0,15 м/с. [12] 2 Расчет якорно-швартовного устройства и схемы управленияЯкорно-швартовное устройство предназначено для опускания и поднятия якорей при постановке и снятии судна с якоря, а также для выполнения швартовных операций. Якорно-швартовное устройство включает в себя исполнительный двигатель с аппаратурой управления, якорно-швартовные лебедки (брашпили или шпили), якорные канаты и якоря. На современных судах привод якорно-швартовных устройств осуществляется с помощью электрических двигателей. На речных судах транспортного флота в качестве носовых якорно-швартовных устройств, как правило, используются брашпили с электрическим приводом, обеспечивающие операции с двумя якорями и двумя швартовными барабанами. В качестве кормовых устройств обычно используются шпили. Так как носовые якорно-швартовные устройства в процессе эксплуатации судна используются гораздо чаще кормовых, то они и чаще нуждаются в обслуживании и текущих ремонтах.[14] В связи с этим одной из задач настоящего дипломного проекта является модернизация именно электропривода брашпиля теплохода. Определим норму якорного снабжения принятого к модернизации буксира-толкача мощностью 590 кВт. Норма якорного снабжения судна, количество и вес якорей, длина и калибр якорных цепей, устанавливаются Правилами Речного Регистра РФ в зависимости от главных размерений судна, его класса и разряда. Все это выражается в характеристике судна Nс [1,2]: где L = 38,5 м - длина судна; В = 8,2 м - ширина судна; Н = 3,2 м - высота борта судна; УS - поправка на площадь надстроек судна. Поправку на площадь надстроек судна определяем как Подставив числовые значения, получим для поправки на площадь надстроек УS = 53м2, а для характеристики судна Nc = 245 м2. Якорное снабжение Nc= 200: калибр цепи d = 0,022 м; число якорей 2; наименьшая длина двух цепей Lц = 280 м; наименьшая масса якоря 400 кг; расчетная глубина стоянки 80 м; водоизмещение судна D = 408 т;цепь с распорками разрывная нагрузка цепи Fраз = 210 кН; удельная масса цепи q = 8,6 кг/м. 2.1 Расчет и выбор электродвигателя брашпиляНоминальный момент на валу электродвигателя  (1) (1)Максимальный момент сопротивления – Мmax = 44,3 Нм. Перегрузочная способность электродвигателя  (2) (2)С учетом возможного снижения напряжения судовой сети на 10% номинальный момент двигателя  (3) (3)Номинальная частота вращения вала электродвигателя [5, 6, 7]:  (4) (4)где Vср = 0,2 м/с = 12 м/мин – средняя линейная скорость выбирания свободно висящей цепи (по нормам Речного Регистра V = 0,1…0,3 м/с). Номинальная мощность электродвигателя По полученным номинальным значениям мощности и частоты вращения выбираем двухскоростной асинхронный электродвигатель МАП211 – 4/8 мощностью в тридцатиминутном режиме Р = 3,6/2,5 кВт, с номинальными частотами вращения nн = 1380/650 об/мин. Двигатели серии МАП предназначены для динамических режимов работы (имеют повышенное скольжение и повышенный пусковой момент), исполнение водозащищенное, что обусловливает широкое применение их для привода различных палубных механизмов.[13] Выбранный двигатель имеет встроенный электромагнитный дисковый тормоз. Механические характеристики электродвигателя приведены на рисунке 2 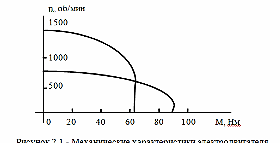 Рисунок 2 – Механические характеристики электродвигателя МАП 211-4/8 Построение нагрузочной диаграммы электродвигателя Для построения нагрузочной диаграммы необходимо, кроме значений моментов, определить время работы двигателя на каждой стадии процесса съемки судна с якоря.[14] На первой стадии выбирается участок цепи, лежащий на грунте длиной l1: l1 = L – l = 27 м. Где L = 140 м – полная длина якорной цепи; l = 113 м – длина провисающего участка цепи Время работы двигателя на первой стадии  (6) (6)где n1 =1455 об/мин определяем по механической характеристике электродвигателя на большей скорости. Получаем t1 = 132 с. Скорость подтягивания судна на первой стадии  (7) (7)Скорость лежит в пределах допустимой Речным Регистром РФ. Длина цепи, выбираемой на второй стадии l2 = L – l1 – H = 140 – 27- 80 = 33 м, (8) где H = 80 м – расчетная глубина стоянки судна на якоре. По механической характеристике электродвигателя, в соответствии со средним моментом на второй стадии, определяем среднюю частоту вращения двигателя n2 = 1215 об/мин. Время работы двигателя на второй стадии  (9) (9)На третьей стадии электродвигатель стоит под током. Принимаем время этой стадии t3 = 30 с. Средний момент на четвертой стадии По механической характеристике электродвигателя находим среднюю частоту вращения его на этой стадии n4 = 1470 об/мин. Время подъема свободно висящего участка цепи  (11) (11)Средняя скорость подъема цепи на четвертой стадии  (12) (12)Полное время съемки судна с якоря T = t1 + t2 + t3 + t4 = 132 + 186 + 30 + 378 = 726 c, (13) что меньше допустимого Речным Регистром РФ (не более 20 минут). По полученным значениям Мi и ti строим нагрузочную диаграмму электродвигателя 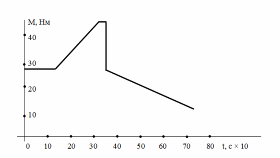 Рисунок 3 – Нагрузочная диаграмма электродвигателя брашпиля Проверочный расчет выбранного электродвигателя. Выбранный электродвигатель проверим на нагрев методом эквивалентного момента [9,10]:  (14) (14)Подставив значения моментов и время на каждой стадии, получим Мэ = 26,7 Нм. Номинальный момент выбранного двигателя на большей скорости для тридцатиминутного режима из каталожных данных Мн = 27 Нм. Выбранный двигатель проходит по нагреву, так как выполняется условие Мэ ≥ Мн. Проверим электродвигатель на обеспечение им швартовных операций. Необходимый момент для обеспечения швартовных операций  (15) (15)где Тш – номинальное тяговое усилие на швартовном барабане, Нм; Dш – диаметр швартовного барабана, м; i – передаточное число брашпиля; η – к.п.д. передачи от электродвигателя к швартовному барабану. Для брашпиля модели Б2Р Тш = 9800 Н, Dш = 0,3 м, i = 105, η = 0,6. Получаем  Линейная скорость выбирания швартовного троса  (16) (16) где : nш – частота вращения электродвигателя. При моменте на валу, равном 23,3 Нм, по механической характеристике электродвигателя определяем nш = 1455 об/мин. При этом Электродвигатель будет удовлетворять требованиям, если Мн ≥. Мш, Vш ≥. Vшз, где Мн – номинальный момент электродвигателя для тридцатиминутного режима и Vшз – заданная скорость выбирания швартовых. Заданная скорость выбирания швартовых равна 0,18 м/с, следовательно, электродвигатель обеспечивает выполнение швартовых операций. 2.2 Выбор схемы управленияОписание существующей схемы управления электроприводом брашпиля.[15] На модернизируемом судне для управления электродвигателем брашпиля применяется кулачковый контроллер типа КВ-1800.  Рисунок 4 – Схема электрическая принципиальная контроллера Контроллер достаточно прост, имеет малые массу и габариты и обеспечивает ступенчатое регулирование скорости двухскоростного асинхронного электродвигателя. Недостатком такой системы управления является значительное искрение в силовых контактах в моменты коммутации (особенно при их размыкании). Это приводит к необходимости частой их замены и профилактики, особенно на судах, где электропривод брашпиля используется довольно часто. Буксиры-толкачи относятся к такому типу судов, так как часто стоят на рейде в ожидании составов и сами формируют эти составы (при формировании составов электропривод брашпиля используется довольно интенсивно). Поэтому на таких судах целесообразнее использовать бесконтактные системы управления электродвигателем брашпиля.[16] К таким типам электроприводов можно отнести электроприводы постоянного тока с регулированием напряжения на якорной обмотке с помощью тиристорного преобразователя. Однако такие электроприводы имеют высокие сложность, стоимость, худшие энергетические показатели и предъявляют повышенные требования к квалификации обслуживающего персонала. Еще более сложными и дорогими являются электроприводы переменного тока с частотным управлением. Так как к электроприводам брашпилей не предъявляются высокие требования в отношении плавности и диапазона регулирования скорости, целесообразнее всего в таких электроприводах использовать системы с тиристорными коммутаторами. В этом случае будет обеспечиваться ступенчатое регулирование скорости и бестоковая коммутацию. В то же время такие схемы управления достаточно просты и надежны. К установке на модернизируемое судно предложим схему такого типа. При разработке схемы управления электродвигателем брашпиля будем иметь в виду, что к электроприводам якорно-швартовных устройств предъявляются следующие основные требования: электропривод должен обеспечивать:[17] одновременный подъем двух якорей с половинной глубины стоянки, причем отрыв якорей от грунта не одновременный; подъем одного якоря с максимальной расчетной глубины стоянки на якоре; заданное время съемки судна с якоря при максимальной нормированной глубине стоянки; швартовку судна при отжимающем ветре в 6 баллов; стоянку электродвигателя под током в течение не менее 30 секунд с нагретого состояния; надежное удержание якоря на весу в случае нарушения работы электропривода; отдачу якоря из ходовой рубки; высокую надежность работы, простоту в обслуживании, высокие технико-экономические показатели, иметь малые массы и габариты. Первые пять требований были учтены при расчете электродвигателя якорно-швартовного устройства. Остальные должны обеспечиваться схемой управления электродвигателем. Разработка схемы управления электроприводом брашпиля Для повышения надежности работы электропривода нужно выбрать схему управления с тиристорными коммутаторами в силовой цепи. Один из вариантов такой схемы, приведенный на, был предложен в 2002 году также при выполнении дипломного проекта. Схема обеспечивает подключение двухскоростного асинхронного электродвигателя, причем переключение скоростей осуществляется при выключенных тиристорных коммутаторах, выполненных на тиристорах VT1 – VT2 и VT3 – VT4. Схема реверса двигателя и переключения его скоростей, как и до модернизации, формируется силовыми контактами контроллера. Тиристорные коммутаторы обеспечивают только подачу напряжения на статорные обмотки двигателя после замыкания реверсирующих контактов контроллера К.3, К.4 или К.5, К.6 (и соответствующих переключений контактов выбора скорости) и снятие этого напряжения до их размыкания. Этим обеспечивается бестоковая коммутация силовых контактов контроллера. Для обеспечения такой коммутации требуются небольшие изменения в конструкции самого контроллера. 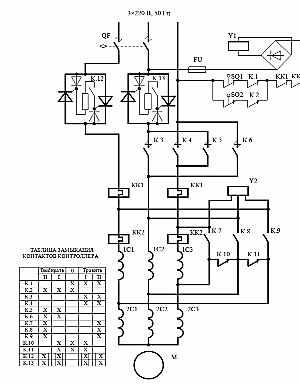 Рисунок 5 – Вариант модернизированной схемы электропривода Предлагается исключить из схемы один из силовых контактов К.10 – К.12 контроллера (например, К.12), обеспечивающих формирование схемы «звезда» на первой скорости двигателя. Оставшиеся контакты К.10 и К.11 обеспечат формирование заданной схемы. На траверсу силового контакта К.12, вместо него, необходимо установить два слаботочных контакта К.12 и К.13, которые включаются в цепи управляющих электродов тиристоров тиристорных коммутаторов.Необходимо также изменить профиль кулачковой шайбы, управляющей контактом К.12. На шайбе должны быть предусмотрены впадины и кулачки, обеспечивающие замыкание слаботочных контактов после замыкания реверсирующих контактов К.3, К.4 (К.5, К.6) и контактов второй скорости К.7, К.8, К.9 и размыкание слаботочных контактов до размыкания названных силовых контактов. Недостатком предложенной схемы является то, что новая кулачковая шайба должна быть выполнена очень точно и очень точно должны быть установлены два вспомогательных слаботочных контакта. В корпусе контроллера, имеющего малые габариты, это сделать трудно. Будет также затруднена и регулировка положения этих контактов. А при неправильной регулировке замыкание или размыкание силовых контактов контроллера может происходить в моменты, когда тиристорные коммутаторы включены, следовательно, бестоковая коммутация осуществляться не будет. Для того, чтобы имелась возможность регулировки моментов включения и выключения тиристорных коммутаторов, предлагается использовать оптронные тиристоры. Для управления ими можно использовать также оптронные пары «светодиод – фотодиод». Их в корпусе контроллера можно крепить также вместо одного силового контакта, например, К.. На кулачковой шайбе этого контакта закрепляется тонкая пластина из непрозрачного материала, разделяющая светодиод и фотодиод. В этой пластине высверливается четыре отверстия, диаметром не больше диаметров светодиода и фотодиода. Отверстия располагаются таким образом, чтобы свет, излучаемый светодиодом, попадал через одно из этих отверстий на фотодиод только в тех положениях вала кулачкового контроллера, при которых силовые контакты надёжно замкнуты или разомкнуты. При незначительном угле поворота штурвала контроллера непрозрачная пластина перекроет оптронную пару, что приведет к выключению тиристорных коммутаторов. Дальнейший поворот штурвала обеспечит переключение силовых контактов контроллера, после чего между светодиодом и фотодиодом окажется другое отверстие. Фотодиод будет в состоянии проводимости, что снова обеспечит включение тиристорных коммутаторов. Предлагаемая схема управления электроприводом брашпиля приведена. Тиристорные коммутаторы представляют собой по два встречно-параллельно включенных оптотиристора UT1, U2 и U3, U4. Отпирание тиристоров производится за счет подачи на их управляющие светодиоды напряжения прямой полярности от схемы правления. Это напряжение будет только в тех случаях, когда между светодиодом HL1 и фотодиодом BL1 будет находиться одно из отверстий в непрозрачной пластине. Так как нагрузочная способность фотодиода мала, он включен в цепь базы транзистора VT1, через который напряжение от выпрямителя UZ2 подается на управляющие светодиоды оптотиристоров. [19] Когда фотодиод BL1 закрыт, заперт и транзистор VT1. При этом ток через управляющие фотодиоды не протекает и оптотиристоры закрыты. Когда фотодиод BL1 находится в проводящем состоянии, транзистор VT1 открыт, и через управляющие светодиоды всех четырех оптотиристоров будет протекать ток. Каждый оптотиристор проводит только в один полупериод, но встречно-параллельное их включение обеспечивает подачу на статорные обмотки двигателя трёхфазного переменного тока. Отпирание каждого тиристора (при протекании токов через их светодиоды) происходит в начале проводящего полупериода, запирание – после спадания тока через него до тока удержания. Преимущества оптотиристоров перед обычными тиристорами в том, что у них нет потенциальной связи между силовыми цепями и цепями управления. Транзистор VT2 с включенным в цепь базы стабилитроном выполняют роль стабилизатора напряжения в цепи управления. 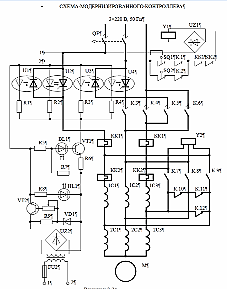 Рисунок 6 – Схема модернизированного контроллера 2.3 Выбор аппаратуры Тиристорные коммутаторы представляют собой по два встречно-параллельно включенных оптронных тиристора U1, U2 и U3, U4 Отпирание тиристоров производится за счет подачи на их управляющие светодиоды положительных потенциалов через транзистор VT1 и ограничивающие резисторы R1, R2, R3 и R4. Каждый тиристор проводит только в один полупериод, но встречно-параллельное их включение обеспечивает подачу на статорные обмотки двигателя трёхфазного переменного тока. Отпирание каждого тиристора (при открытом транзисторе VT1) происходит в начале проводящего полупериода, запирание – после спадания тока через него до тока удержания.[20] Выбор оптронных тиристоров осуществляем по току и обратному напряжению. Максимальным током для данного двигателя является пусковой ток обмотки большей скорости (Iп = 70 А). Напряжение судовой сети – 220 В (амплитудное значение – 310 В). Среднее значение тока через тиристор Iт = 0,675 Iд [11]. Максимальный ток, протекающий через тиристор при пуске двигателя Imax = 0,675 ∙ 70 = 47 А. Ток тиристора при номинальной нагрузке двигателя на меньшей скорости (Iн = 17,8 А) Iт = 0,675 ∙ 017,8 = 12 А. Выбираем два блока оптронных тиристоров [12,13] типа МТОТО-80-4-3И с допустимым током 80 А и обратным напряжением 400 В. В блок входят два тиристора, которые могут быть включены встречно-параллельно, и два управляющих светодиода. Ток управления (при 25 ᴼС) – 10 мА. Прямой ударный ток – 1500 А. Рекомендуемый охладитель – О55. При естественном охлаждении длительно допустимая нагрузка - 40 А. Допустимая перегрузка в 125 % - до 30 секунд. Транзистор VT1, обеспечивающий подачу питания на управляющие светодиоды оптотиристоров, выбираем по напряжению и току коллекторной цепи. Будем считать, что стабилизатор обеспечивает поддержание в цепи управления напряжения в 24 В. Суммарный максимальный ток через 4 управляющих светодиода Iк = 4·10= 40 мА. По полученному значению тока и напряжению 24 В выбираем транзистор типа КТ375А со следующими параметрами [14]: постоянное напряжение коллектор-эмиттер – 60 В; постоянный ток коллектора – 100 мА; максимальный ток базы – 10 мА. Величину сопротивления резистора R5 определим по максимально допустимому значению тока базы транзистора VT1:  (18) (18)Мощность резистора Выбираем резистор типа МЛТ - 2 мощностью 2 Вт, сопротивлением 620 Ом. Два таких резистора включаем параллельно. Ограничивающие резисторы R1 – R4 предназначены для ограничения тока через управляющие светодиоды оптронных тиристоров U1 – U4. Так как принято напряжение в цепи управления 24 В, ток через ограничивающий резистор  Мощность резистора  Выбираем резисторы МЛТ-2 мощностью 1 Вт, сопротивлением 2,4 кОм. Резистор R6 предназначен для температурной стабилизации характеристик транзистора VT1. Сопротивление его составляет обычно несколько ом [14]. Примем к установке резистор сопротивлением 6,2 Ом. Так как через него протекает ток коллекторной цепи транзистора VT1, его мощность  Выбираем резистор МЛТ-2 мощностью 1 Вт, сопротивлением 6,2 Ом. Для управления транзистором VT1 выбираем оптронную пару (светодиод HL1 и фотодиод BL1): светодиод ИК LED-5013IRAB [15], инфракрасный фотодиод типа 5012PD. Ток фотодиода - 100 мА, ток светодиода - 30 мА. Транзистор VT2 со стабилитроном VD1 выполняют роль стабилизатора напряжения в цепи управления. Выбираем стабилитрон КС-133 с напряжением стабилизации 3,3 В. Ток стабилитрона - 30 мА. Для унификации транзистор VT2 выберем такой же, как и VT1 – типа КТ375А. Для питания цепей управления выбираем сухой однофазный трансформатор ОСО-0,25 мощностью 250 ВА, напряжением 220/24 В. Выпрямленное напряжение, снимаемое с выпрямительного моста UZ2 [11]  (20) (20)Конденсатор, включенный на выходе выпрямителя UZ2 выполняет функции фильтра (сглаживает пульсации выпрямленного напряжения). За счет этого конденсатора напряжение после фильтра выше, чем после выпрямителя. Величина этого напряжения зависит от различных факторов (емкость конденсатора, сопротивление цепи, ток нагрузки и другие) [11]. Расчет этого напряжения обычно затруднен, поэтому примем напряжение после фильтра примерно равным 26 В. В этом случае сопротивление резистора R9, ограничивающего ток стабилитрона VD1  Для того, чтобы через стабилитрон протекал ток меньший, чем предельно допустимый, выбираем резистор с сопротивлением, больше расчетного. Выберем резистор типа МЛТ –2 мощностью 2 Вт, сопротивлением 1 кОм. В связи с малыми габаритами тиристорных коммутаторов, они могут быть смонтированы в непосредственной близости от силового контроллера. Объём работ по монтажу будет незначительным 2.4 Выбор кабеля и условия прокладкиСечение проводов и кабелей определяют, исходя из допустимого нагрева с учетом нормального и аварийного режимов, а также неравномерного распределения токов между отдельными линиями, поскольку нагрев изменяет физические свойства проводника, повышает его сопротивление, увеличивает бесполезный расход электрической энергии на нагрев токопроводящих частей и сокращает срок службы изоляции. Чрезмерный нагрев опасен для изоляции и контактных соединений и может привести к пожару и взрыву. Для всех источников и потребителей электроэнергии, кроме щита питания с берега выбираются кабели марки КНР, соответственно для ЩПБ марки НРШМ. Таблица 1 – Выбор кабеля
3 Техническое обслуживание и техническая эксплуатация электромеханической системы якорно-швартовного устройстваЭксплуатация - это процесс использования электропривода по назначению и подержание его в технически исправном состоянии. К управлению якорными и швартовными механизмами допускаются боцманы, старшие матросы. Поэтому основная задача механика по правильному использованию электропривода состоит в составлении добротной инструкции об особенностях управления якорно-швартовными приводами данного судна. Инструкция должна учитывать правила техники безопасности, относящиеся к электроприводу и работающему механизму.[6] Следует помнить, что за правильностью использования электрооборудования якорно-швартовных устройств, за соблюдением допускаемых режимов работы ответственность несут лица, в чьем заведовании эти механизмы находятся (обычно 2-й механик). Именно поэтому электромеханик обязан обстоятельно проверить знания и умение операторов, допускаемых к управлению электроприводом. При подготовке к действию брашпиля (шпиля) боцман или лицо, его заменяющее, должны: 1) убедиться в отключении ручного привода; 2) проверить положение ленточного тормоза и, если нужно, затянуть его; 3) проверить действие кулачковой (фрикционной) муфты; 4) проверить чистоту якорной цепи на участке от механизма до клюза и правильность ее положения на цепном барабане; 5) подготовить к действию привод брашпиля (шпиля); при паровом приводе прогреть паропровод и паровую машину; 6) при отключенном цепном барабане провернуть брашпиль (шпиль) вхолостую в обе стороны на несколько оборотов, наблюдая за показаниями амперметра; 7) при наличии дистанционного управления проверить действий исполнительных механизмов при управлении со всех постов; 8)доложить на мостик о готовности брашпиля (шпиля) к действию. При отдаче якоря без включения двигателя брашпиля необходимо: 1) зажать ленточный тормоз и выключить цепной барабан; 2) отжать ленточный тормоз и произвести травление якоря; для уменьшения скорости травления зажимать ленточный тормоз плавно и без рывков;[7] 3) после вытравливания заданного числа смычек якорной цепи зажать полностью ленточный тормоз. Для подъема якоря необходимо: 1) включить муфту, сообщающую цепной барабан с валом; 2) ослабить ленточный тормоз и одновременно пустить двигатель брашпиля; 3) обмывать водой цепь при подъеме; 4)вести наблюдение за состоянием якорной цепи и положением якоря при подходе клюзу, при этом скорость подъема должна быть снижена; 5) после подъема якоря затянуть ленточный тормоз до отказа; 6) взять якорную цепь на стопор; 7) передать нагрузку с ленточного тормоза на стопор, для чего ослабить тормоз и снова затянуть его; 8)отключить цепной барабан. При включенном приводе брашпиля (шпиля) следить, чтобы колодки и ленты тормозов были достаточно отжаты и не препятствовали работе двигателя. При работе электрического привода брашпиля (шпиля) следить за показаниями амперметра, не допуская увеличения силы тока свыше номинального значения. Муфты предельного момента должны быть всегда исправны и отрегулированы. Во время травления якорной цепи или работы на турачку необходимо находиться в стороне от линии движения якорной цепи или швартовного троса и не прикасаться к движущимся частям. Запрещается оставлять на турачках закрепленные тросы, а также использовать стопоры для удержания якорной цепи при стоянке на якоре. Назначение этих стопоров – крепление втянутых якорей по-походному. Необходимо следить за смазкой механизма брашпиля (шпиля), проверяя ее состояние в каждом случае подготовки к работе. Открытые передачи брашпиля должны быть постоянно покрыты смазкой рекомендованного состава и закрыты защитными кожухами[18] Не допускается работа брашпиля с таким износом цепных барабанов, при котором наблюдается проскальзывание якорной цепи. При выводе из действия брашпиля с паровым приводом должны быть обеспечены продувание цилиндров и паропровода и освобождение их от конденсата во избежание гидравлических ударов при последующих пусках и возможного размораживания машины и трубопроводов в зимний период. 4 Основные положения правил электробезопасного обслуживания электромеханической системы якорно-швартовного устройстваСоблюдение правил технического обслуживания и использования обеспечивает надёжную и безопасную работу судового электропривода якорно- швартового устройства. К управлению брашпилем допускается боцман, а к управлению шпилем — матрос I класса, сдавший экзамен по соответствующему техминимуму. Старший электромеханик или старший механик обязаны проинструктировать лиц, допущенных к управлению брашпилем или шпилем, об особенностях управления указанными механизмами.[12] При подготовке к действию электроприводов грузоподъемных, якорно-швартовных устройств, шлюпочных лебедок и других палубных механизмов необходимо: 1) убедиться внешним осмотром в его исправности, измерить сопротивление изоляции и спустить конденсат; 2) установить рукоятки командоаппаратов в нулевые положения; при наличии муфт переключения редуктора установить их рукоятки на требуемую грузоподъемность; 3) открыть вентиляционные отверстия на электродвигателях и пусковых резисторах; включить вентиляцию в помещениях аппаратуры управления; 4) включить питание на ГРЩ » РЩ, а также средства дистанционного управления брашпилем и регистрации длины вытравленной якорной цепи; 5) обеспечить необходимую освещенность мест грузовых или промысловых операций, а также постов управления механизмами при производстве работ в ночное время; 6) опробовать электроприводы в действии в том числе электромагнитные и механические тормоза, конечные выключатели и блокировки, а также органы аварийного отключения; 7) доложить вахтенному помощнику капитана о готовности электроприводов к действию. При возникновении неисправности тормозов, электродвигателей и аппаратуры управления срабатывании блокировок или защиты работа электроприводов грузоподъемных устройств должна быть немедленно прекращена. Возобновление работы разрешается только после устранения неисправности. После использования электроприводов грузоподъемных, якорно-швартовных и буксирных устройств, шлюпочных лебёдок и других палубных механизмов необходимо:[13] 1) установить рукоятки командо-аппаратов в нулевые положения; 2) выключить питание электроприводов на РЩ и ГРЩ (по согласованию с вахтенным помощником); 3) закрыть все вентиляционные отверстия и выключить вентиляцию помещений аппаратуры управления. Состав работ технического обслуживания каждого вида электрооборудования, входящего в состав электропривода, определяется указаниями соответствующих разделов настоящих правил и инструкциями по эксплуатации. Виды работ технического обслуживания и их периодичность, определяется ПГТО (План-график технического обслуживания или другая действующая документация, определяющая номенклатуру, состав, периодичность и трудоёмкость работ), а в случае его отсутствия — инструкцией по эксплуатации. Заключение В данной работе произведен обзор и краткое описание буксира толкача проекта 758 Б и его технические характеристики. Дан обзор якорно-швартовных устройств, общие требования и требования Речного Регистра к ним. Правила техники безопасности при обслуживании судового электрооборудования, якорно-швартовного устройства. Общие правила охраны труда и Правила техники безопасности на судах внутреннего плавания. Произведен расчет электропривода якорно-швартовного устройства. Расчет и выбор электродвигателя брашпиля. Была выбрана модернизируемая схема управления на судне для управления электродвигателем брашпиля с учетом основных требований. Так-же была выбрана более усовершенствованная аппаратура, в которой объём работ по монтажу был незначительным. Был выбран кабель и его условия прокладки с учетом нормального и аварийного режима работы. Приведено техническое обслуживание и техническая эксплуатация электромеханической системы якорно-швартовного устройства и основные положения правил электробезопасного обслуживания электромеханической системы якорно-швартовного устройства. Так как соблюдение правил технического обслуживания и использования обеспечивает надёжную и безопасную работу судового электропривода якорно-швартовного устройства. Назначение якорного устройства судна. Якорно-швартовное устройство предназначено для: обеспечения надежного положения на рейде или в открытом море; удержания на месте судна одновременно со швартами; помощи в снятии судна с мели; возможности управления судном в стесненных и ограниченных условиях. Также назначение устройств зависит от размещения и роли. В носовой части располагают основные становые якоря. Их задача – фиксировать базовое положение корабля. В качестве вспомогательных используются судовые стоп-анкера, размещаемые обычно в кормовой части. Такие устройства обеспечивают определенный поворот и положение судна. Основные элементы якорного устройства: якорь; якорная цепь; стопоры; якорные механизмы; командоконтроллер; якорные клюзы и крышки к ним; цепной ящик и трубы; устройства для крепления и отдачи концов. Список литературы1 ГОСТ 2.105 – 95 ЕСКД. Общие требования к текстовым документам 2 ГОСТ 2.304 – 81 ЕСКД. Шрифты чертёжные 3 ГОСТ 2.316 – 68 ЕСКД. Правила нанесения на чертежах надписей, технических характеристик и таблиц 4 Правила безопасности труда на судах речного флота. Министерство речного флота РСФСР: /– Л.: Ленинградский институт водного транспорта, 1990. – 135 с. 5 Российский Речной Регистр. Правила Т.3.: /- Российский Речной Регистр 6 Андрезен В.А. Автоматизация судовых энергетических установок. 2изд.[Текст]: / Андрезен В.А., Гольдберг М.Э., Городущенко В.Н., Уваров Ю.Н. -СПб: Судостроение,1993. - 278с. 7 Белоусов, В.В. Судовая электроника и электроавтоматика [Текст]: учебник/ В.В. Белоусов, В.А. Волкогон — М.: Колос, 2017. — 645 c. 8 Ганенко А.П. Оформление текстовых и графических материалов при подготовке дипломных проектов, курсовых и письменных экзаменационных работ (требование ЕСКД) [Текст]: Учебник для нач.проф. образования: учебное пособие для сред. образования – 3 - е изд., стер. / А.П. Ганенко, М. И. Лопарь. – М: Издательский центр «Академия», 2006. – 336 с. 9 Соловьев Н.Н. Судовые электроэнергетические системы [Текст]: Учебник для речных училищ и техникумов / Соловьев Н.Н. – М: Транспорт, 1987. – 222 с. 10 Чаплыгин И.В. Электрооборудование и электродвижение речных судов [Текст]: Учебник для речных училищ и техникумов / Чаплыгин И.В., Разживин А.Н. – М: Транспорт, 1979. – 352 с. 11 Чипурнов А.И. Судовая электроавтоматика [Текст]: Учебник для речных училищ и техникумов / Чипурнов А.И., Константинов С.С., Чаплыгин С.И. – М.: Транспорт, 1984. – 250 с. 12 Антипьева Л. А. Дайджест [Текст]: Краткий технический справочник по инженерным дисциплинам / Антипьева Л. А., Палагушкина Б.В. – Н.: Транспорт, 2014. – 397с. 13 Иванов В.И. Электрические средства автоматизации речных судов: Справочник. / Иванов В.И. – М: Транспорт, 1990. – 135 с. 14 Китаенко Г.И. Судовое электрооборудование: Справочник судового электротехника. Т.2. / Г.И. Китаенко – Л.: Судостроение, 1980. 15 Соломатин В.М. Справочник электромеханика и электрика судна / Соломатин В.М. - М.: Речной Транспорт, – 1963. – 632 с. 16 Алаев Е.Г. Основы технической эксплуатации судового электрооборудования [Текст]: Учебное пособие / Алаев Е.Г., Никатов Б.А. Палагушкин Б.В. – Новосибирск: НГАВТ, 2014. –132с. 17 Пипченко А.Н. Электрооборудование, электронная аппаратура и системы управления [Текст]: Учебное пособие / А.Н. Пипченко, В.В. Пономаренко, Ю.И. Теплов, В.А. Шевченко – Одесса: ТЭС, 2016. – 480 с. 18 Руководство: Технические данные электрические [Электронный ресурс].–Режим доступа: https://electro.mashinform.ru/generatory-moshchnostyu-do-100-kvt/sinhronnye-generatory-serij-msk-i-mskf-obj4078.html 19 Руководство: Лампы сигнальные для систем автоматики, технические данные [Электронный ресурс].– Режим доступа: http://kembrik.pro/catalog/lampy-dlya-svetosignalnoy-armatury-503040?producer=432 20 Руководство: Аппараты защиты [Электронный ресурс].– Режим доступа:https://fb.ru/article/402348/apparatyi-zaschityi-naznachenie-vidyi-klassifikatsiya-tehnicheskie-harakteristiki-ustanovka-osobennosti-ekspluatatsii-nastroyki-i-remonta |