Вопросы_к_экзамену_по_операционным. Функции и механизмы программдиспетчеров, предшественников операционных систем
 Скачать 1.12 Mb. Скачать 1.12 Mb.
|

Семафоры Дейкстра. Решение проблемы «производитель-потребитель» с помощью семафоров.СемафорыОдним из первых механизмов, предложенных для синхронизации поведения процессов, стали семафоры, концепцию которых описал Дейкстра (Dijkstra) в 1965 году. Концепция семафоровСемафор представляет собой целую переменную, принимающую неотрицательные значения, доступ любого процесса к которой, за исключением момента ее инициализации, может осуществляться только через две атомарные операции: P (от датского слова proberen – проверять) и V (от verhogen – увеличивать). Классическое определение этих операций выглядит следующим образом: P(S): пока S == 0 процесс блокируется; S = S – 1; V(S): S = S + 1; Эта запись означает следующее: при выполнении операции P над семафором S сначала проверяется его значение. Если оно больше 0, то из S вычитается 1. Если оно меньше или равно 0, то процесс блокируется до тех пор, пока S не станет больше 0, после чего из S вычитается 1. При выполнении операции V над семафором S к его значению просто прибавляется 1. В момент создания семафор может быть инициализирован любым неотрицательным значением. Подобные переменные-семафоры могут с успехом применяться для решения различных задач организации взаимодействия процессов. В ряде языков программирования они были непосредственно введены в синтаксис языка (например, в ALGOL-68), в других случаях реализуются с помощью специальных системных вызовов. Соответствующая целая переменная располагается внутри адресного пространства ядра операционной системы. Операционная система обеспечивает атомарность операций P иV, используя, например, метод запрета прерываний на время выполнения соответствующих системных вызовов. Если при выполнении операции P заблокированными оказались несколько процессов, то порядок их разблокирования может быть произвольным, например, FIFO. Решение проблемы producer-consumer с помощью семафоровОдной из типовых задач, требующих организации взаимодействия процессов, является задача producer-consumer(производитель-потребитель). Пусть два процесса обмениваются информацией через буфер ограниченного размера. Производитель закладывает информацию в буфер, а потребитель извлекает ее оттуда. На этом уровне деятельность потребителя и производителя можно описать следующим образом. Producer: while(1) { produce_item; put_item; } Consumer: while(1) { get_item; consume_item; } Если буфер заполнен, то производитель должен ждать, пока в нем появится место, чтобы положить туда новую порцию информации. Если буфер пуст, то потребитель должен дожидаться нового сообщения. Как можно реализовать эти условия с помощью семафоров? Возьмем три семафора: empty, full и mutex. Семафор full будем использовать для гарантии того, что потребитель будет ждать, пока в буфере появится информация. Семафор empty будем использовать для организации ожидания производителя при заполненном буфере, а семафор mutex – для организации взаимоисключения на критических участках, которыми являются действия put_item и get_item (операции "положить информацию" и "взять информацию" не могут пересекаться, так как в этом случае возникнет опасность искажения информации). Тогда решение задачи на C-подобном языке выглядит так: Semaphore mutex = 1; Semaphore empty = N; /* где N – емкость буфера*/ Semaphore full = 0; Producer: while(1) { produce_item; P(empty); P(mutex); put_item; V(mutex); V(full); } Consumer: while(1) { P(full); P(mutex); get_item; V(mutex); V(empty); consume_item; } Легко убедиться, что это действительно корректное решение поставленной задачи. Попутно заметим, что семафорыиспользовались здесь для достижения двух целей: организации взаимоисключения на критическом участке и взаимосинхронизациискорости работы процессов.
Предположим, что несколько процессов конкурируют за обладание конечным числом ресурсов. Если запрашиваемый процессом ресурс недоступен, ОС переводит данный процесс в состояние ожидания. В случае когда требуемый ресурс удерживается другим ожидающим процессом, первый процесс не сможет сменить свое состояние. Такая ситуация называется тупиком (deadlock) . Говорят, что в мультипрограммной системе процесс находится в состоянии тупика, если он ожидает события, которое никогда не произойдет. Системная тупиковая ситуация, или "зависание системы", является следствием того, что один или более процессов находятся в состоянии тупика. Иногда подобные ситуации называют взаимоблокировками. В общем случае проблема тупиков эффективного решения не имеет. Рассмотрим пример. Предположим, что два процесса осуществляют вывод с ленты на принтер. Один из них успел монополизировать ленту и претендует на принтер, а другой наоборот. После этого оба процесса оказываются заблокированными в ожидании второго ресурса (см. рис. 7.1). 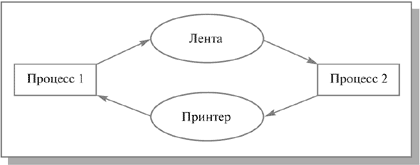 Рис. 7.1.Пример тупиковой ситуации Определение. Множество процессов находится в тупиковой ситуации, если каждый процесс из множества ожидает события, которое может вызвать только другой процесс данного множества. Так как все процессы чего-то ожидают, то ни один из них не сможет инициировать событие, которое разбудило бы другого члена множества и, следовательно, все процессы будут спать вместе. Выше приведен пример взаимоблокировки, возникающей при работе с так называемыми выделенными устройствами. Тупики, однако, могут иметь место и в других ситуациях. Hапример, в системах управления базами данных записи могут быть локализованы процессами, чтобы избежать состояния гонок (см. лекцию 5 "Алгоритмы синхронизации"). В этом случае может получиться так, что один из процессов заблокировал записи, необходимые другому процессу, и наоборот. Таким образом, тупики могут иметьместо как на аппаратных, так и на программных ресурсах. Тупики также могут быть вызваны ошибками программирования. Например, процесс может напрасно ждать открытия семафора, потому что в некорректно написанном приложении эту операцию забыли предусмотреть. Другой причиной бесконечного ожидания может быть дискриминационная политика по отношению к некоторым процессам. Однако чаще всего событие, которого ждет процесс в тупиковой ситуации, – освобождение ресурса, поэтому в дальнейшем будут рассмотрены методы борьбы ступиками ресурсного типа. Ресурсами могут быть как устройства, так и данные. Hекоторые ресурсы допускают разделение между процессами, то есть являются разделяемыми ресурсами. Например, память, процессор, диски коллективно используются процессами. Другие не допускают разделения, то есть являются выделенными, например лентопротяжное устройство. К взаимоблокировке может привести использование как выделенных, так и разделяемых ресурсов. Например, чтение с разделяемого диска может одновременно осуществляться несколькими процессами, тогда как запись предполагает исключительный доступ к данным на диске. Можно считать, что часть диска, куда происходит запись, выделена конкретному процессу. Поэтому в дальнейшем мы будем исходить из предположения, что тупики связаны с выделенными ресурсами, то есть тупики возникают, когда процессу предоставляется эксклюзивный доступ к устройствам, файлам и другим ресурсам. Традиционная последовательность событий при работе с ресурсом состоит из запроса, использования и освобождения ресурса. Тип запроса зависит от природы ресурса и от ОС. Запрос может быть явным, например специальный вызов request, или неявным –open для открытия файла. Обычно, если ресурс занят и запрос отклонен, запрашивающий процесс переходит в состояние ожидания. Далее в данной лекции будут рассматриваться вопросы обнаружения, предотвращения, обхода тупиков и восстановления послетупиков. Как правило, борьба с тупиками – очень дорогостоящее мероприятие. Тем не менее для ряда систем, например для систем реального времени, иного выхода нет. Условия возникновения тупиковУсловия возникновения тупиков были сформулированы Коффманом, Элфиком и Шошани в 1970 г.
Для образования тупика необходимым и достаточным является выполнение всех четырех условий. Обычно тупик моделируется циклом в графе, состоящем из узлов двух видов: прямоугольников – процессов и эллипсов –ресурсов, наподобие того, что изображен на рис. 7.1. Стрелки, направленные от ресурса к процессу, показывают, что ресурсвыделен данному процессу. Стрелки, направленные от процесса к ресурсу, означают, что процесс запрашивает данный ресурс. Основные направления борьбы с тупикамиПроблема тупиков инициировала много интересных исследований в области информатики. Очевидно, что условие циклического ожидания отличается от остальных. Первые три условия формируют правила, существующие в системе, тогда как четвертое условие описывает ситуацию, которая может сложиться при определенной неблагоприятной последовательности событий. Поэтому методы предотвращения взаимоблокировок ориентированы главным образом на нарушение первых трех условий путем введения ряда ограничений на поведение процессов и способы распределения ресурсов. Методы обнаружения и устранения менее консервативны и сводятся к поиску и разрыву цикла ожидания ресурсов. Итак, основные направления борьбы с тупиками:
Игнорирование проблемы тупиковПростейший подход – не замечать проблему тупиков. Для того чтобы принять такое решение, необходимо оценить вероятностьвозникновения взаимоблокировки и сравнить ее с вероятностью ущерба от других отказов аппаратного и программного обеспечения. Проектировщики обычно не желают жертвовать производительностью системы или удобством пользователей для внедрения сложных и дорогостоящих средств борьбы с тупиками. Любая ОС, имеющая в ядре ряд массивов фиксированной размерности, потенциально страдает от тупиков, даже если они не обнаружены. Таблица открытых файлов, таблица процессов, фактически каждая таблица являются ограниченными ресурсами. Заполнение всех записей таблицы процессов может привести к тому, что очередной запрос на создание процесса может быть отклонен. При неблагоприятном стечении обстоятельств несколько процессов могут выдать такой запрос одновременно и оказаться в тупике. Следует ли отказываться от вызова CreateProcess, чтобы решить эту проблему? Подход большинства популярных ОС (Unix, Windows и др.) состоит в том, чтобы игнорировать данную проблему в предположении, что маловероятный случайный тупик предпочтительнее, чем нелепые правила, заставляющие пользователей ограничивать число процессов, открытых файлов и т. п. Сталкиваясь с нежелательным выбором между строгостью и удобством, трудно найти решение, которое устраивало бы всех. Обнаружение тупиковОбнаружение взаимоблокировки сводится к фиксации тупиковой ситуации и выявлению вовлеченных в нее процессов. Для этого производится проверка наличия циклического ожидания в случаях, когда выполнены первые три условия возникновения тупика. Методы обнаружения активно используют графы распределения ресурсов. Рассмотрим модельную ситуацию.
Вопрос состоит в том, является ли данная ситуация тупиковой, и если да, то какие процессы в ней участвуют. Для ответа на этот вопрос можно сконструировать граф ресурсов, как показано на рис. 7.3. Из рисунка видно, что имеется цикл, моделирующий условие кругового ожидания, и что процессы P2,P3,P5, а может быть, и другие находятся в тупиковой ситуации. 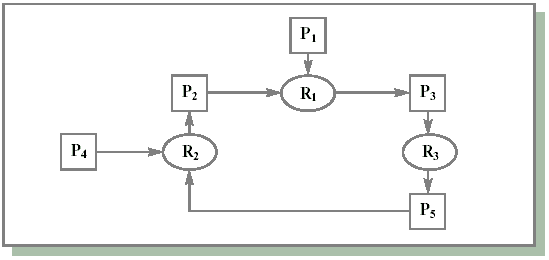 Рис. 7.3.Граф ресурсов Визуально легко обнаружить наличие тупика, но нужны также формальные алгоритмы, реализуемые на компьютере. Один из таких алгоритмов описан в [Таненбаум, 2002], там же можно найти ссылки на другие алгоритмы. Существуют и другие способы обнаружения тупиков, применимые также в ситуациях, когда имеется несколько ресурсов каждого типа. Так в [Дейтел, 1987] описан способ, называемый редукцией графа распределения ресурсов, а в [Таненбаум, 2002] – матричный алгоритм. Восстановление после тупиковОбнаружив тупик, можно вывести из него систему, нарушив одно из условий существования тупика. При этом, возможно, несколько процессов частично или полностью потеряют результаты проделанной работы. Сложность восстановления обусловлена рядом факторов.
Самый простой и наиболее распространенный способ устранить тупик – завершить выполнение одного или более процессов, чтобы впоследствии использовать его ресурсы. Тогда в случае удачи остальные процессы смогут выполняться. Если это не помогает, можно ликвидировать еще несколько процессов. После каждой ликвидации должен запускаться алгоритм обнаружениятупика. По возможности лучше ликвидировать тот процесс, который может быть без ущерба возвращен к началу (такие процессы называются идемпотентными). Примером такого процесса может служить компиляция. С другой стороны, процесс, который изменяет содержимое базы данных, не всегда может быть корректно запущен повторно. В некоторых случаях можно временно забрать ресурс у текущего владельца и передать его другому процессу. Возможность забрать ресурс у процесса, дать его другому процессу и затем без ущерба вернуть назад сильно зависит от природы ресурса. Подобное восстановление часто затруднительно, если не невозможно. В ряде систем реализованы средства отката и перезапуска или рестарта с контрольной точки (сохранение состояния системы в какой-то момент времени). Если проектировщики системы знают, что тупик вероятен, они могут периодически организовывать для процессов контрольные точки. Иногда это приходится делать разработчикам прикладных программ. Когда тупик обнаружен, видно, какие ресурсы вовлечены в цикл кругового ожидания. Чтобы осуществить восстановление, процесс, который владеет таким ресурсом, должен быть отброшен к моменту времени, предшествующему его запросу на этот ресурс. |