робот по введению профдеятельности. впд робот. И. О. Фамилия Создание автономного транспортного устройства на электрической тяге
 Скачать 0.71 Mb. Скачать 0.71 Mb.
|

|
Министерство науки и высшего образования Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования ИРКУТСКИЙ НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Институт авиамашиностроения и транспорта Лаборатория аппаратных и программных средств вычислительной техники Руководитель Р.В. Кононенко И.О.Фамилия Создание автономного транспортного устройства на электрической тяге Выполнили студены группы МИРб-21-1 Наместникова А.И. Бойкова Е.А. шифр группы И.О.Фамилия Работа защищена Р.В. Кононенко И.О.Фамилия _______________ подпись Иркутск 2022г. Цель работы: спроектировать и изготовить автономное транспортное устройство на электрической тяге, которое доставит груз весом 100 гр. по прямой из пункта А в пункт В, и выгрузить груз в пункте «В». Пункты «А» и «В» находятся на расстоянии 1 м. друг от друга и представляют из себя черные квадраты размером 200 на 200 мм, нанесенный на белом материале, после черного квадрата находится стенка. Предъявленные требования к работе: По нажатию кнопки «Старт» тележка должна начать движение в направлении пункта «В». В случаи если тележку установили не в пункт «А», движение тележке по нажатию кнопки «Старт» не должно начинаться. Тележка должна добраться до пункта «В» и остановиться в черном квадрате. Остановкой в черном квадрате считается если более 50% габаритных размеров тележки находятся в черном квадрате доставить и выгрузить в пункт В. Груз считается выгруженным при условии, если 50% находится в зоне черного квадрата и груз покинул тележку; Вернуться в пункт А и остановиться, если 50% габариты тележки находятся в пункте «А», то считается, что тележка достигла пункта «А». Дополнительные требования к мехатронной системе: При наличии препятствия транспортное устройство должно остановиться и издать звуковой или световой сигнал; После устранения препятствия устройство продолжает движение; при наличии препятствия транспортное устройство должно остановиться, издать звуковой или световой сигнал, объехать препятствие, продолжая движение в пункт В; Наличие на транспортном средстве возможности радиоуправления, кнопок «Старт» и «Стоп»; Наличие 3D модели созданного транспортного устройства, которая на 85% схоже с представленным транспортным устройством; Наличие правильно оформленного алгоритма работы транспортного устройства; Правильное ведение проекта (наличие проектной документации (эскизы, чертежи, записи, расчетный формулы), комментариев при написании программ); Анализ проделанной работы: было выполнена основная цель работы и основные требования: создание транспортного устройства, доставляющее груз весом 100 гр. из пункта «А» в «В». Дополнительно было сделано: при наличии препятствия робот останавливается и подаёт звуковой сигнал, а после устранения препятствия продолжает свой путь. Был оформлен алгоритм работы устройства в виде блок схемы, и представлена 3D модель. Чему научились в ходе выполнения заданной работы: Научились работать с платой Arduino UNO, а именно программированию и основам языка Arduino; Научились работать с питанием основной платы и других электрических устройств, входящих в состав устройства; Для создания корпуса был изучен и рассмотрен лазерный ЧПУ станок по дереву; Для создания некоторых деталей крепления необходим был 3D принтер, для чего было изучено его устройство и правильность работы с интерфейсом принтера; Научились правильно подключать электрические компоненты между собой, для правильности работы мехатронной системы; Научились отбирать, проверять и устанавливать необходимые для работы транспортного средства электрические компоненты. Трудности, с которыми столкнулись в ходе работы над роботом: Нехватка знаний в области программирования и основ языка Arduino Нехватка времени; Нехватка знаний при работе со станками ЧПУ; Нехватка или полное отсутствие некоторых необходимых компонентов; Вывод: создание транспортного устройства дало нам многое: новые знания в программировании, дающие нам преимущество в будущем, научились работать с ЧПУ станками и 3D-принтером, научились проектировать будущее устройство и создавать необходимый алгоритм работы устройства, по которым будет произведено устройство, научились выбирать необходимые компоненты устройства для создания мехатронной системы. Блок схема работы программы 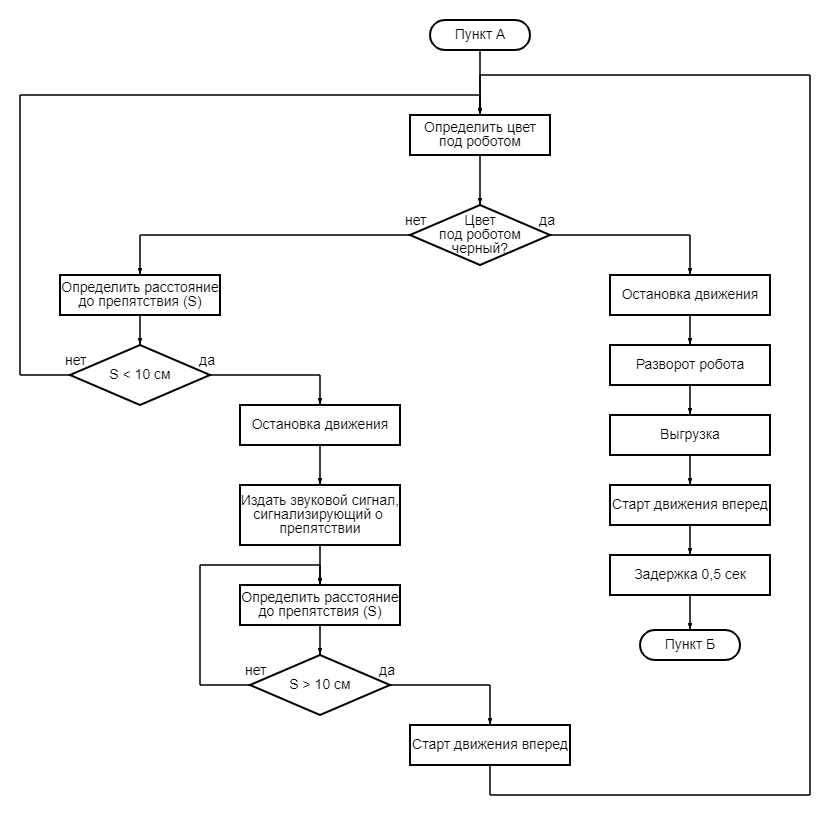 3D модель транспортного устройства  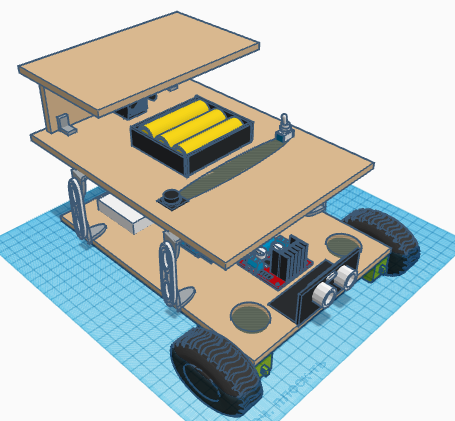 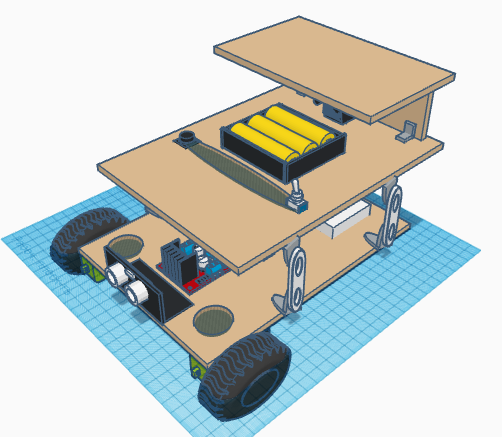 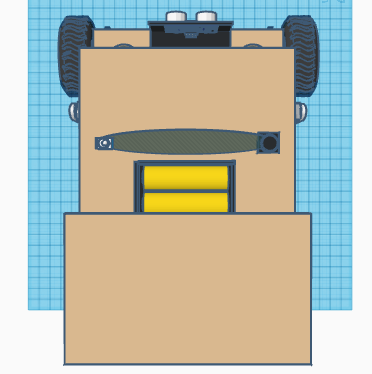 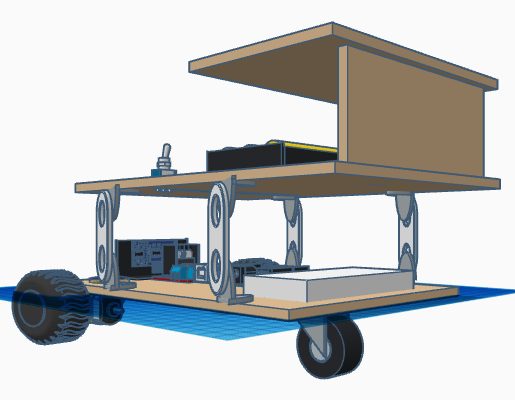 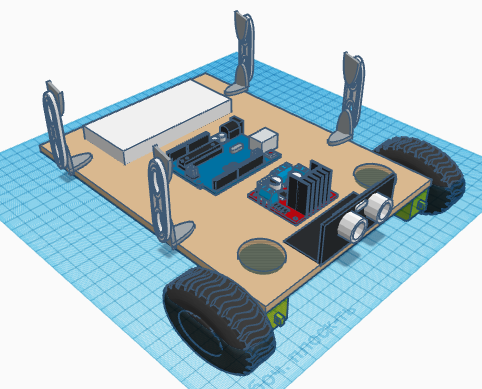  |