И.В.Черных. Simulink. И. В. Черных. "Simulink Инструмент моделирования динамических систем"
 Скачать 3.7 Mb. Скачать 3.7 Mb.
|

|
9.3.7. Блок передаточной функции Zero-Pole Назначение: Блок Zero-Pole определяет передаточную функцию с заданными полюсами и нулями: где Z – вектор или матрица нулей передаточной функции (корней полинома числителя), P – вектор полюсов передаточной функции (корней полинома знаменателя), K – коэффициент передаточной функции, или вектор коэффициентов, если нули передаточной функции заданы матрицей. При этом размерность вектора K определяется числом строк матрицы нулей. Параметры: Zeros – Вектор или матрица нулей. Poles – Вектор полюсов. Gain – Скалярный или векторный коэффициент передаточной функции. Absolute tolerance — Абсолютная погрешность. Количество нулей не должно превышать число полюсов передаточной функции. В том случае, если нули передаточной функции заданы матрицей, то блок Zero-Pole моделирует векторную передаточную функцию. Нули или полюса могут быть заданы комплексными числами. В этом случае нули или полюса должны быть заданы комплексно-сопряженными парами полюсов или нулей, соответственно. Начальные условия при использовании блока Zero-Pole полагаются нулевыми. На рис. 9.3.10 показан пример использования блока Zero-Pole. В примере передаточная функция имеет один действительный нуль и два комплексно-сопряженных полюса. 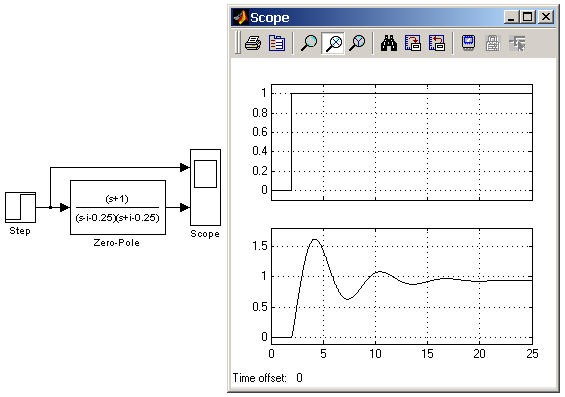 Рис. 9.3.10. Пример использования блока Zero-Pole. [Скачать пример] 9.3.8. Блок модели динамического объекта State-Space Назначение: Блок создает динамический объект, описываемый уравнениями в пространстве состояний: где x – вектор состояния, u – вектор входных воздействий, y – вектор выходных сигналов, A, B, C, D - матрицы: системы, входа, выхода и обхода, соответственно. Размерность матриц показана на рис. 9.3.11 (n – количество переменных состояния, m – число входных сигналов, r – число выходных сигналов). Рис. 9.3.11. Размерность матриц блока State-Space Параметры: A –Матрица системы. B – Матрица входа. C – Матрица выхода D – Матрица обхода Initial condition – Вектор начальных условий. Absolute tolerance — Абсолютная погрешность. На рис. 9.3.11 показан пример моделирования динамического объекта с помощью блока State-Space. Матрицы блока имеют следующие значения: 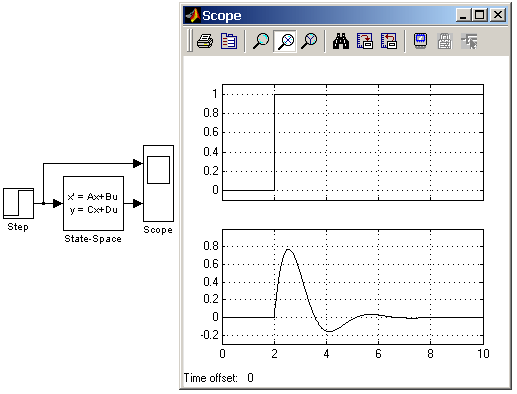 Рис. 9.3.12. Пример использования блока State-Space. 9.4. Discrete – дискретные блоки 9.4.1. Блок единичной дискретной задержки Unit Delay Назначение: Выполняет задержку входного сигнала на один шаг модельного времени. Параметры: Initial condition – Начальное значение для выходного сигнала. Sample time – Шаг модельного времени. Входной сигнал блока может быть как скалярным, так и векторным. При векторном входном сигнале задержка выполняется для каждого элемента вектора. Блок поддерживает работу с комплексными и действительными сигналами. На рис. 9.4.1 показан пример использования блока для задержки дискретного сигнала на один временной шаг, равный 0.1с. 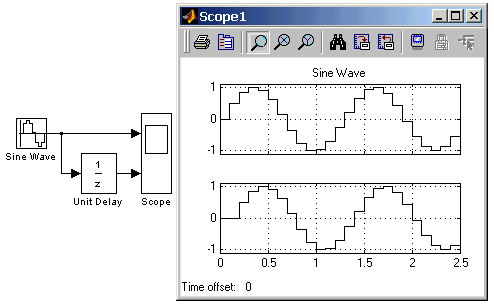 Рис. 9.4.1. Пример использования блока Unit Delay [Скачать пример] 9.4.2. Блок экстраполятора нулевого порядка Zero-Order Hold Назначение: Блок выполняет дискретизацию входного сигнала по времени. Параметры: Sample time – Величина шага дискретизации по времени. Блок фиксирует значение входного сигнала в начале интервала квантования и поддерживает на выходе это значение до окончания интервала квантования. Затем выходной сигнал изменяется скачком до величины входного сигнала на следующем шаге квантования. На рис. 9.4.2 показан пример использования блока Zero-Order Hold для формирования дискретного сигнала. 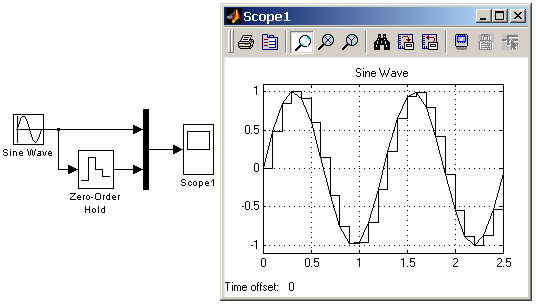 Рис. 9.4.2. Пример формирования дискретного сигнала с помощью блока Zero-Order Hold [Скачать пример] Блок экстраполятора нулевого порядка может использоваться также для согласования работы дискретных блоков имеющих разные интервалы квантования. На рис. 9.4.3 показан пример такого использования блока Zero-Order Hold. В примере блок Discrete Transfer Fcn имеет параметр Sample time = 0.4 , а для блока Discrete Filter этот же параметр установлен равным 0.8. 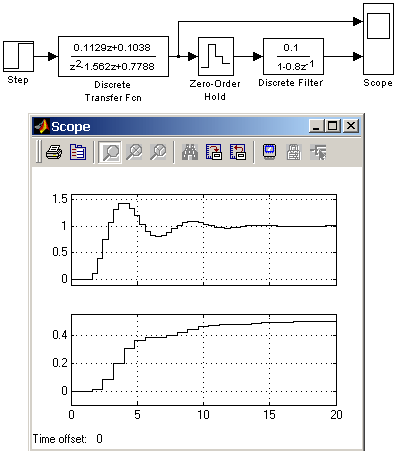 Рис. 9.4.3. Использование блока Zero-Order Hold для согласования работы дискретных блоков. [Скачать пример] 9.4.3. Блок экстраполятора первого порядка First-Order Hold Назначение: Блок задает линейное изменение выходного сигнала на каждом такте дискретизации, в соответствии с крутизной входного сигнала на предыдущем интервале дискретизации. Параметры: Sample time – Величина шага дискретизации по времени. Пример экстраполяции синусоидального сигнала этим блоком показан на рис. 9.4.4. 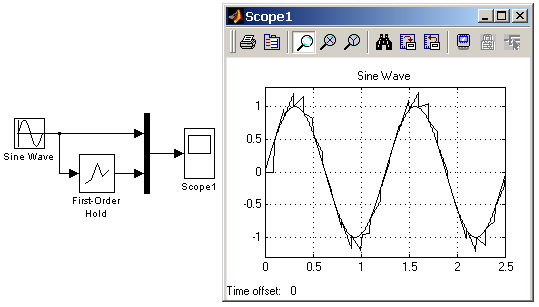 Рис. 9.4.4. Использование блока First-Order Hold [Скачать пример] 9.4.4. Блок дискретного интегратора Discrete-Time Integrator Назначение: Блок используется для выполнения операции интегрирования в дискретных системах. Параметры: Integration method – Метод численного интегрирования: Forward Euler - Прямой метод Эйлера. Метод использует аппроксимацию T/(z-1) передаточной функции 1/s. Выходной сигнал блока рассчитывается по выражению: y(k) = y(k–1) + T*u(k–1), y – выходной сигнал интегратора, u – входной сигнал интегратора, T – шаг дискретизации, k – номер шага моделирования. Backward Euler – Обратный метод Эйлера. Метод использует аппроксимацию T*z/(z–1) передаточной функции 1/s. Выходной сигнал блока рассчитывается по выражению: y(k) = y(k–1) + T*u(k). Trapeziodal – Метод трапеций. Метод использует аппроксимацию T/2*(z+1)/(z–1) передаточной функции 1/s. Выходной сигнал блока рассчитывается по выражению: x(k) = y(k–1) + T/2 * u(k–1). Sample time — Шаг дискретизации по времени. Остальные параметры дискретного интегратора те же, что и у блока аналогового интегратора Integrator (библиотека Continuous). На рис. 9.4.5 показан пример демонстрирующий все три способа численного интегрирования блока Discrete-Time Integrator. Как видно из рисунка изображение блока меняется в зависимости от выбранного метода интегрирования. 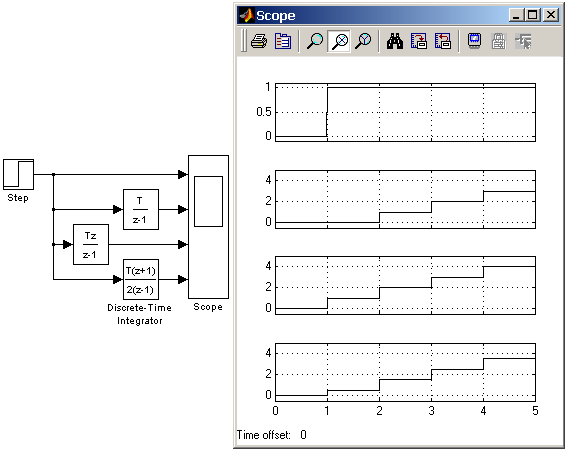 Рис. 9.4.5. Выполнение интегрирования блоками Discrete-Time Integrator, реализующими разные численные методы. [Скачать пример] 9.4.5. Дискретная передаточная функция Discrete Transfer Fсn Назначение: Блок Discrete Transfer Fcn задает дискретную передаточную функцию в виде отношения полиномов:  , ,где m+1и n+1 – количество коэффициентов числителя и знаменателя, соответственно. num – вектор или матрица коэффициентов числителя, den – вектор коэффициентов знаменателя. Параметры: Numerator — Вектор или матрица коэффициентов числителя Denominator – Вектор коэффициентов знаменателя Sample time — Шаг дискретизации по времени. Порядок числителя не должен превышать порядок знаменателя. Входной сигнал блока должен быть скалярным. В том случае, если коэффициенты числителя заданы вектором, то выходной сигнал блока будет скалярным (также как и входной сигнал). На рис. 9.4.6 показан пример использования блока Discrete Transfer Fcn. В примере рассчитывается реакция на единичное ступенчатое воздействие дискретного аналога колебательного звена: Шаг дискретизации выбран равным 0.5 с. 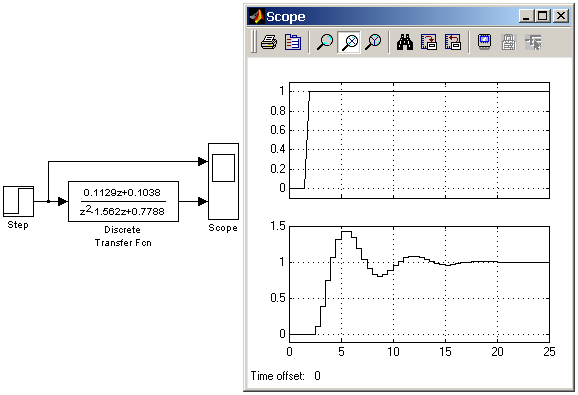 Рис. 9.4.6. Использование блока Discrete Transfer Fcn [Скачать пример] 9.4.6. Блок дискретной передаточной функции Discrete Zero-Pole Назначение: Блок Discrete Zero-Pole определяет дискретную передаточную функцию с заданными полюсами и нулями: где Z – вектор или матрица нулей передаточной функции, P – вектор полюсов передаточной функции, K – коэффициент передаточной функции, или вектор коэффициентов, если нули передаточной функции заданы матрицей. При этом размерность вектора K определяется числом строк матрицы нулей. Параметры: Zeros – Вектор или матрица нулей. Poles – Вектор полюсов. Gain – Скалярный или векторный коэффициент передаточной функции. Sample time — Шаг дискретизации по времени. Количество нулей не должно превышать число полюсов передаточной функции. В том случае, если нули передаточной функции заданы матрицей, то блок Discrete Zero-Pole моделирует векторную передаточную функцию. Нули или полюса могут быть заданы комплексными числами. В этом случае нули или полюса должны быть заданы комплексно-сопряженными парами полюсов или нулей, соответственно. Начальные условия при использовании блока Discrete Zero-Pole полагаются нулевыми. На рис. 9.4.7 показан пример использования блока Discrete Zero-Pole. С помощью рассматриваемого блока моделируется дискретный аналог передаточной функции . Шаг дискретизации выбран равным 0.5 с. 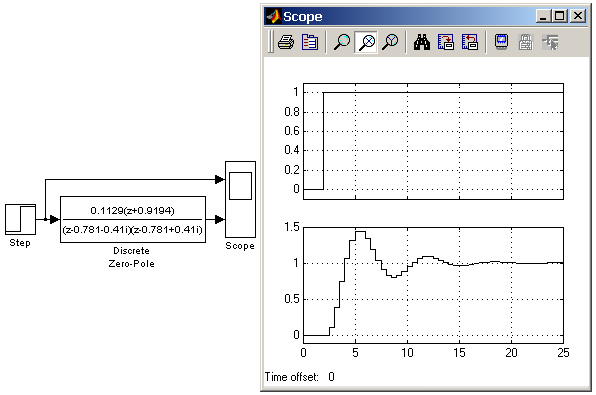 Рис. 9.4.7. Использование блока Discrete Zero-Pole. [Скачать пример] 9.4.7. Блок дискретного фильтра Discrete Filter Назначение: Блок дискретного фильтра Discrete Filter задает дискретную передаточную функцию от обратного аргумента (1/z): m+1и n+1 – количество коэффициентов числителя и знаменателя, соответственно. num – вектор или матрица коэффициентов числителя, den – вектор коэффициентов знаменателя. Параметры: Numerator — Вектор или матрица коэффициентов числителя Denominator –Вектор коэффициентов знаменателя Sample time — Шаг дискретизации по времени. На рис. 9.4.8 показан пример использования блока Discrete Filter. С помощью рассматриваемого блока моделируется дискретный аналог передаточной функции: Шаг дискретизации выбран равным 0.5 с. 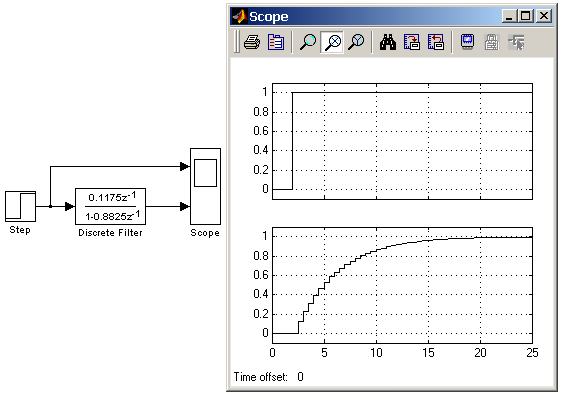 Рис. 9.4.8. Использование блока Discrete Filter. [Скачать пример] 9.4.8. Блок модели динамического объекта Discrete State-Space Назначение: Блок создает динамический объект, описываемый уравнениями в пространстве состояний: где x – вектор состояния, u – вектор входных воздействий, y – вектор выходных сигналов, A, B, C, D - матрицы: системы, входа, выхода и обхода, соответственно, n – номер шага моделирования. Размерность матриц показана на рис. 9.4.9 (n – количество переменных состояния, m – число входных сигналов, r – число выходных сигналов). Рис. 9.4.9. Размерность матриц блока Discrete State-Space Параметры: A –Матрица системы. B – Матрица входа. C – Матрица выхода D – Матрица обхода Initial condition – Вектор начальных условий. Sample time — Шаг дискретизации по времени. На рис. 9.4.10 показан пример моделирования динамического объекта с помощью блока Discrete State-Space. Матрицы блока имеют следующие значения: 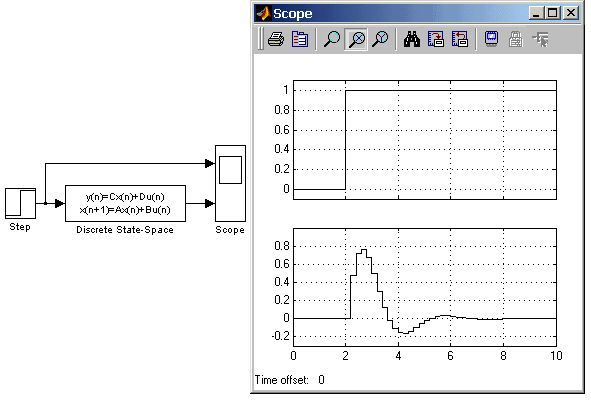 Рис. 9.4.10. Пример использования блока Discrete State-Space. 9.5. Nonlinear - нелинейные блоки 9.5.1. Блок ограничения Saturation Назначение: Выполняет ограничение величины сигнала. Параметры: Upper limit - Верхний порог ограничения. Lower limit - Нижний порог ограничения. Treat as gain when linearizing (флажок) - Трактовать как усилитель с коэффициентом передачи равным 1 при линеаризации. Выходной сигнал блока равен входному если его величина не выходит за порог ограничения. По достижении входным сигналом уровня ограничения выходной сигнал блока перестает изменяться и остается равным порогу. На рис. 9.5.1 показан пример использования блока для ограничения синусоидального сигнала. На рисунке приводятся временные диаграммы сигналов и зависимость выходного сигнала блока от входного. 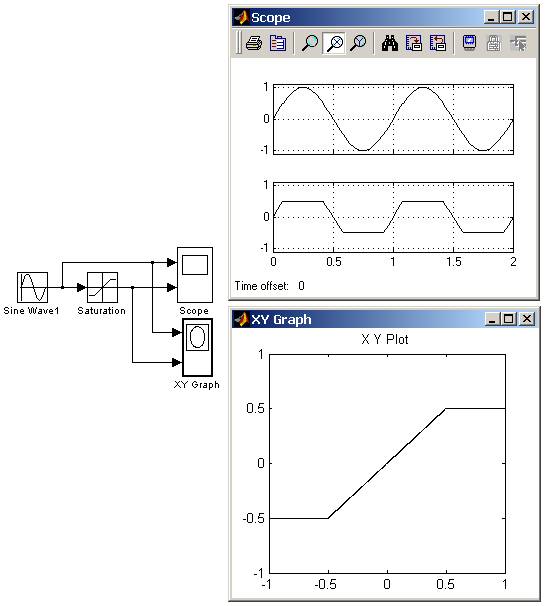 Рис. 9.5.1. Пример использования блока Saturation [Скачать пример] 9.5.2. Блок с зоной нечувствительности Dead Zone Назначение: Реализует нелинейную зависимость типа "зона нечувствительности (мертвая зона)". Параметры: Start of dead zone - Начало зоны нечувствительности (нижний порог). End of dead zone - Конец зоны нечувствительности (верхний порог). Saturate on integer overflow (флажок) - Подавлять переполнение целого. При установленном флажке ограничение сигналов целого типа выполняется корректно. Treat as gain when linearizing (флажок) - Трактовать как усилитель с коэффициентом передачи равным 1 при линеаризации. Выходной сигнал блока вычисляется в соответствии со следующим алгоритмом: Если величина входного сигнала находится в пределах зоны нечувствительности, то выходной сигнал блока равен нулю. Если входной сигнал больше или равен верхнему входному порогу зоны нечувствительности, то выходной сигнал равен входному минус величина порога. Если входной сигнал меньше или равен нижнему входному порогу зоны нечувствительности, то выходной сигнал равен входному минус величина порога. На рис. 9.5.2 показан пример использования блока Dead Zone 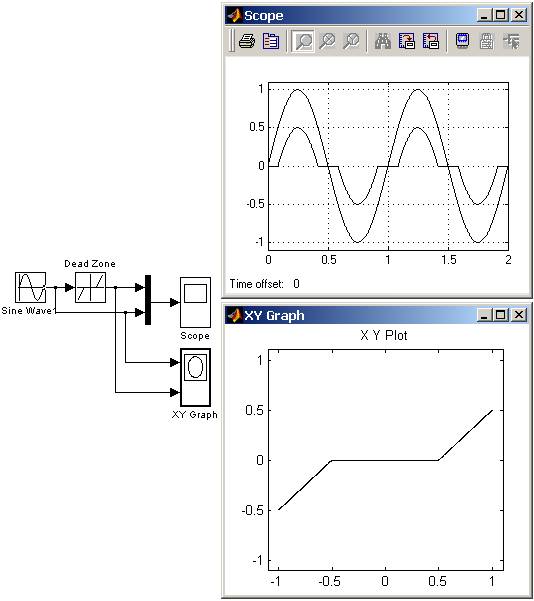 Рис. 9.5.2. Пример использования блока Dead Zone |