курсовая кротов. Исходные данные 3 Выбор электродвигателя 4
 Скачать 0.86 Mb. Скачать 0.86 Mb.
|

 ОглавлениеИсходные данные 3 Выбор электродвигателя 4 Расчет силовой схемы усилителя мощности, выполненного по схеме реверсивного тиристорного преобразователя (ТП) 5 Исходные данные для расчета ТП 5 Выбор трансформатора 5 Расчет параметров выпрямителя 6 Выбор тиристоров 7 Расчет величины сглаживающего дросселя 8 Расчет постоянных времени ЭП 8 Расчет потерь мощности и КПД выпрямителя и ЭП в целом 9 Передаточные функции датчиков тока, скорости и тиристорного преобразователя. 10 Передаточная функция тиристорного преобразователя 10 Определение передаточной функции датчика тока 10 Определение передаточной функции датчика скорости 11 Синтез системы подчиненного регулирования ЭП лебедки 11 Расчет параметров скоростного контура 16 Вывод 21 Исходные данные Вариант №9 масса груза m = 800 кг; скорость подъема  = 0,25 м/с; = 0,25 м/с;точность поддержания скорости  Допустимая величина пульсации тока обмотки якоря 𝐼яп = 0,1𝐼я𝑁 ; При проектировании необходимо выбрать исполнительный двигатель и рассчитать силовую схемы усилителя мощности, выполненного по схеме управляемого тиристорного выпрямителя. 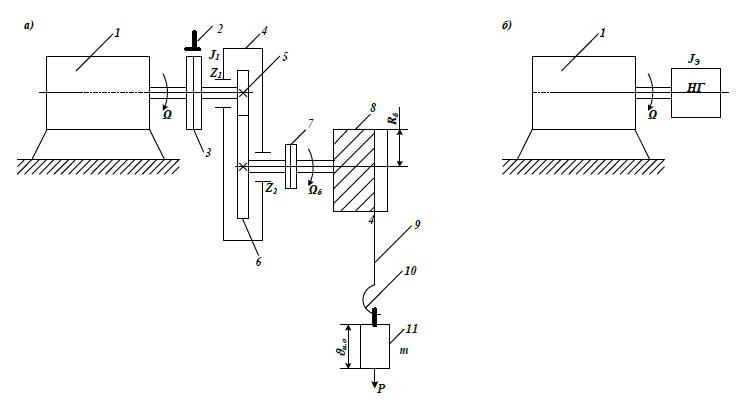 Рис.1 Кинематическая схема электропривода лебедки Выбор электродвигателяМощность электродвигателя при подъеме груза определяем по формуле  Fн – сила тяжести груза; η = ηрηб, – результирующий КПД кинематической схемы; ηр и ηб – КПД соответственно редуктора и барабана . КПД редуктора и барабана. (ηр≈0.8, ηб≈0.9)   Выбираем двигатель постоянного тока типа ДПЦЯ-3. Параметры выбранного двигателя: номинальная мощность Рд N=3000 Вт; номинальная скорость вращения n=3000 об/мин; номинальное напряжение якоря UяN=22 В; номинальный ток обмотки якоря IяN=19 А; активное сопротивление обмотки якоря RяN=0,007 Ом; момент инерции ротора Jд=2600•10-6 кг•м2. Значения номинальной угловой скорости Ωд N  Эквивалентный момент инерции ЭП по формуле  Приведенный к валу двигателя момент сопротивления нагрузки  Расчет силовой схемы усилителя мощности, выполненного по схеме реверсивного тиристорного преобразователя (ТП) Исходные данные для расчета ТП Схема силовой части ТП и способ управления: Схема ТП – два трехфазных мостовых управляемых выпрямителей, включенных по встречно- параллельной схеме (рис.2) способ управления ТП – раздельный. 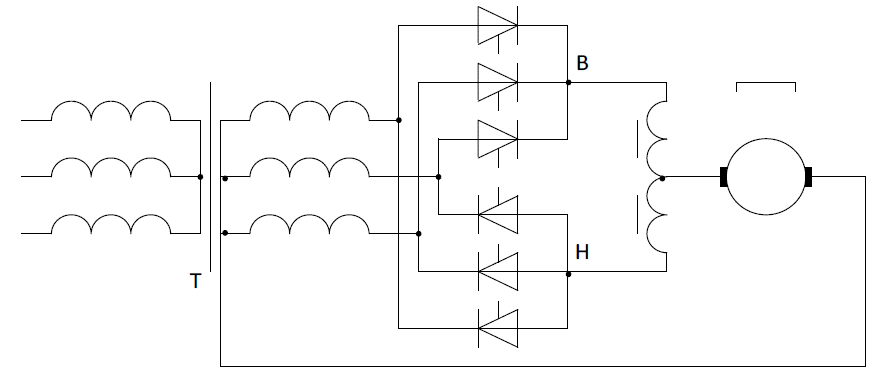 Рис.2 Встречно – параллельная трехфазная однотактная схема реверсивного тиристорного ЭП постоянного тока  Параметры питающей сети: величины напряжение Uc =220/380В; частоты напряжения fc =50 Гц; допустимые отклонения напряжения питающей сети ±ΔUc =±10%. Допустимый коэффициент перегрузки двигателя по моменту, kпер=1,5. Допустимая пульсация тока обмотки якоря Iя.п=0,1 Iя.N. Выбор трансформатораВыбор трансформатора силовой схемы ТП выполняется по двум параметрам: – установленная мощность трансформатора  ; ; – напряжение вторичной обмотки трансформатора  . . Напряжение фазы первичной обмотки равно напряжению питающей сети, рабочая частота трансформатора равна частоте питающей сети   Коэффициент мощности трансформатора трехфазной мостовой схемы выпрямления  На первом этапе расчета элементы выпрямителя еще не выбраны, поэтому при расчете  задаемся следующими примерными значениями падений напряжения: задаемся следующими примерными значениями падений напряжения:   Напряжение холостого хода управляемого выпрямителя   - ток цепи постоянного тока выпрямителя - ток цепи постоянного тока выпрямителя - номинальная расчетная мощность - номинальная расчетная мощностьМощность трансформатора трехфазной мостовой схемы выпрямления  Напряжение вторичной обмотки трансформатора определим по формуле  kсх=2,34; (коэффициент преобразования схемы трехфазной мостовой схемы выпрямления) kc=(UcN-ΔUc)/ UcN=0,9; (коэффициент, учитывающий нестабильность напряжения питающей сети) αmin – минимальное значение угла регулирования, принимаем равным 10о. Принимаем групповую схему выполнения трехфазного трансформатора. Мощность одного трансформатора равна одной трети типовой мощности, т.е. равна 1493.59 Вт. Выбираем три серийных трансформатора типа ОСМ-1,6 мощностью по 1600 Вт каждый и с напряжением вторичных обмоток  Первичную и вторичную обмотки соединяем по схеме «звезда». Расчет параметров выпрямителяОпределим активное сопротивление обмоток фазы трансформатора, приведенное к вторичной обмотке  – значение магнитной индукции в магнитопроводе трансформатора,; – значение магнитной индукции в магнитопроводе трансформатора,; – число стержней магнитопровода трансформатора, несущих обмотки, – число стержней магнитопровода трансформатора, несущих обмотки,  ; ; =2,5·103 – коэффициент, зависящий от схемы выпрямления, трехфазной мостовой схемы; =2,5·103 – коэффициент, зависящий от схемы выпрямления, трехфазной мостовой схемы; =50 Гц =50 Гц Определим индуктивность обмотки якоря:  kL = 0,6 т.к. двигатель ДПЦЯ-3 выполнен без компенсационной обмотки; ρп =1 (число пар полюсов) Определим индуктивность рассеяния обмотки трансформатора, приведенная к вторичной обмотке, La :  uк = 0.07 – напряжение короткого замыкания трансформатора; U2лN = 130 В – номинальное линейное напряжение вторичной обмотки трансформатора; Sт =4800 Вт – номинальная мощность трансформатора; ωc= 2πfc =314.159 с-1– угловая частота напряжения питающей сети Выбор тиристоров - среднее значение тока вентиля - среднее значение тока вентиля - обратное напряжение на тиристорах - обратное напряжение на тиристорахС учетом необходимого коэффициента запаса по напряжению и току необходимо выбрать тиристоры на напряжение не менее 462 В и токи 12.54 А выбираем шесть тиристоров типа ТЧ40, параметры которых: номинальный ток (среднее значение) Iв.ср N = 40 А; максимальное обратное напряжение Uобр max = 500 В; пороговое напряжение ΔUв.пр = 1,1 В; сопротивление тиристора Rв.д = 5.5*10-3 Ом; Расчет величины сглаживающего дросселяопределим требуемое значение индуктивности цепи обмотки якоря Lэ для подавления пульсаций тока якоря Iя.п до величины, равной 0.1*IяN=1.9 А.  ωог.п=kтm2ωc – угловая частота основной гармоники пульсаций тока обмотки якоря. Требуемое значение индуктивности сглаживающего дросселя Lc.д определим как разность индуктивности Lэ и индуктивности обмотки якоря Lя :  Так как  , положителен, значит сглаживающий дроссель устанавливать нужно. , положителен, значит сглаживающий дроссель устанавливать нужно.Выбираем стандартный дроссель типа Д338, обмотки соединяем параллельно, при этом получим следующие параметры дросселя: индуктивность L=0,006 Гн; активное сопротивление обмотки дросселя R=0,83 Ом. Уравнительный дроссель не требуется, т.к. применен раздельный способ управления. Расчет постоянных времени ЭП Эквивалентная индуктивность цепи обмотки якоря  Эквивалентное активное сопротивление цепи обмотки якоря  Электромагнитная постоянная времени  Электромеханическая постоянная времени     Расчет потерь мощности и КПД выпрямителя и ЭП в целомДействующее значение тока вторичной обмотки трансформатора  Потери мощности на активных сопротивлениях обмоток трансформатора  Потери мощности на тиристорах  Сумма потерь мощности  Полезная мощность, отдаваемая выпрямителем двигателю  Коэффициент полезного действия выпрямителя  КПД двигателя  КПД ЭП (полн.)  Вывод: КПД ЭП в целом, находится в тех пределах значений КПД, которые соответствует ЭП малой мощности. Передаточные функции датчиков тока, скорости и тиристорного преобразователя.Передаточная функция тиристорного преобразователяПередаточная функция управляемого тиристорного выпрямителя вместе с системой импульсно-фазового управления СИФУ может быть представлена апериодическим звеном первого порядка с постоянной времени Тп ≈ 0,0004 - 0,01 с Принимаем Тув= Т1=0,0067 с.  Передаточная функция управляемого выпрямителя имеет вид:  Определение передаточной функции датчика токаВыбираем датчик тока фирмы LEM типа HY 10-P, параметры которого: – номинальное значение входного тока IвхN: ± 25 А; – точность в процентах к номинальному значению тока: 2,5 %; – диапазон преобразования: 3·IN А; – выходной сигнал UдтN= 4 В; – рабочая частота: 0…25 кГц; – напряжение питания: ± 15 В; – потребляемый ток: 20 mА; – рабочая температура: -10…+75 оС; – габаритные размеры мм: 36 * 33 * 12. Передаточная функция собственно датчика тока определяется следующим образом:  Передаточная функция согласующего устройства имеет вид:  Передаточная функция датчика тока с согласующим устройством:  Определение передаточной функции датчика скорости Выбираем тахогенератор типа СЛ-161, параметры которого: – номинальная скорость вращения Ωтг N=366.5 рад/с; – номинальное выходное напряжение тахогенератора Uтг N=75 В. Передаточная функция тахогенератора имеет вид:  Передаточная функция согласующего устройства имеет вид:  Тогда передаточная функция датчика скорости в целом имеет вид:  Синтез системы подчиненного регулирования ЭП лебедкиПроектируемая система является системой, регулируемой по скорости и содержит два контура, контур тока (внутренний контур) и контур скорости (внешний контур). Необходимо рассчитать параметры регулятора тока и регулятора скорости.  Т1=0,0067 с.- некомпенсируемая (или малая) постоянная времени    Расчет контура производится для случая неподвижного (заторможенного) якоря или при выключенном возбуждении двигателя. 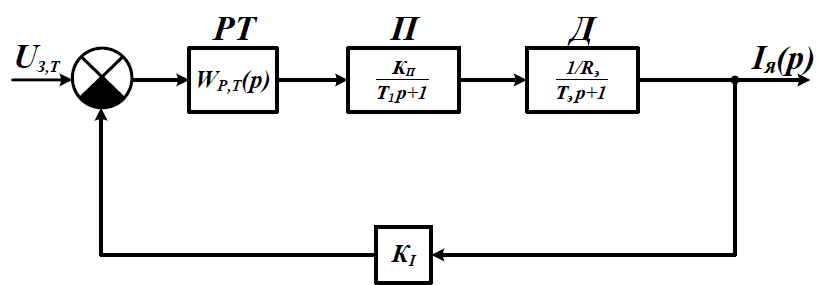 Рис.3 Cруктурная схема контура регулирования тока в системе подчиненного регулирования 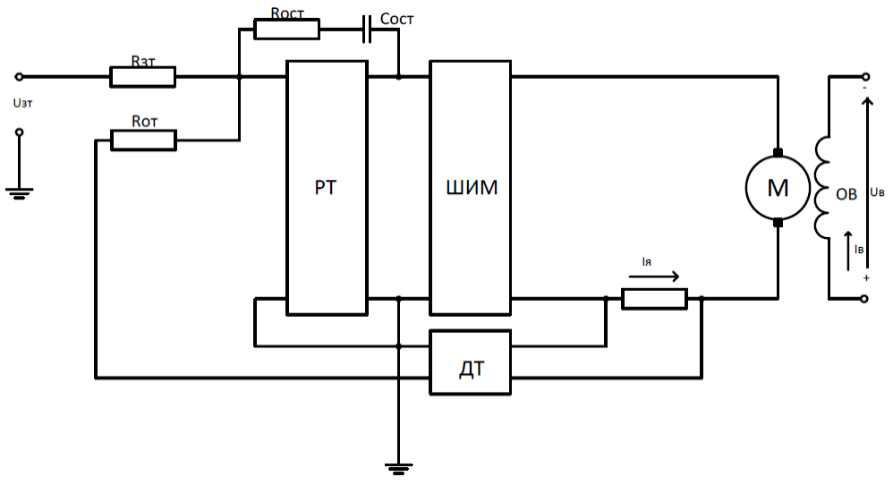 Рис.4. Принципиальная электрическая схема контура регулирования тока В контуре тока имеются две инерционности, характеризуемые постоянными времени: Тэ=0,371 с – электромагнитная постоянная времени якорной цепи; Т1=0,0067 с.- некомпенсируемая (или малая) постоянная времени Передаточная функция разомкнутого контура тока преобразователя и якорной цепи двигателя имеет вид:   В качестве регулятора должен быть применен ПИ – регулятор, передаточная функция которого:   – постоянная времени регулятора тока. – постоянная времени регулятора тока.Тогда передаточная функция разомкнутого контура тока:  Необходимо принять Т0=Тэ. Необходимую форсировку для этой компенсации будет создавать регулятор, воздействуя на схему управления ШИП. В результате передаточная функция разомкнутого токового контура принимает вид:  Передаточная функция замкнутого токового контура  Замкнутый контур представляет собой систему второго порядка. Коэффициент затухания системы  Это условие будет выполнено, если коэффициент при р в характеристическом уравнении системы будет равен:  Откуда определяем требуемую постоянную времени регулятора тока  Тогда параметры ПИ – регулятора   Зададимся величиной емкости конденсатора цепи обратной связи регулятора тока С=0,1мкФ=0,1·10-6 Ф определим величину резисторов R1 и Rос:   Принимаем значения R1=2650 кОм, а Rос=3750 кОм. Передаточная функция ПИ– регулятора  где    Передаточная функция регулятора тока примет вид:  При таком регуляторе тока передаточная функция замкнутой по току системы   Как видно из этой передаточной функции, получилось характеристическое уравнение контура с оптимальным соотношением коэффициентов, что и требовалось. Значит, переходный процесс в контуре тока при выбранной настройке регулятора будет оптимальным при скачке сигнала задания тока Uз.т. 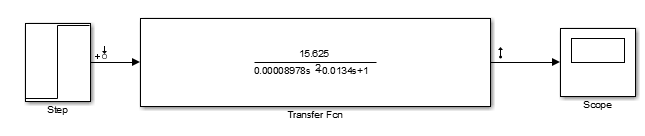 Рис.5. Передаточная функция контура в Simulink 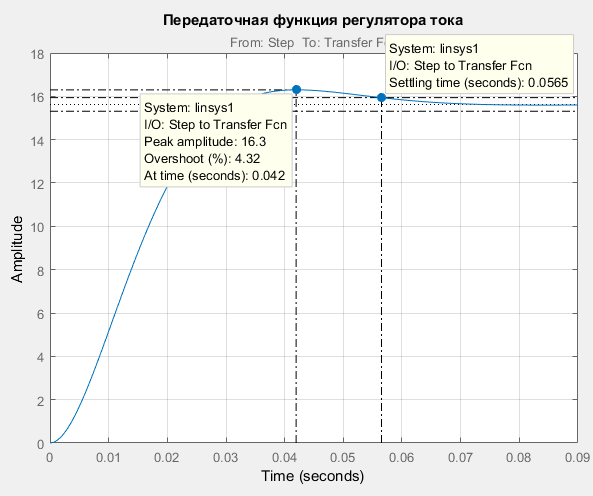 Рис.6. Промоделированная передаточная функция Перерегулирование σ =4.32%, время переходного процесса 0.0565 с. Аналогичным образом, как и в случае контура тока, рассчитывается настройка (параметры регулятора) контура регулирования скорости. В этом контуре используется либо П– регулятор, либо ПИ– регулятор скорости. П– регулятор применяется при малом диапазоне регулирования угловой скорости. Так как параметры регулятора выбираются из условия обеспечения заданного качества переходного процесса, то жесткость механических характеристик привода оказывается неконтролируемой и не высокой. Отношение статического падения угловой скорости в системе с П- регулятором скорости ΔΩс.з к статическому падению угловой скорости при работе двигателя в разомкнутой системе  Перепад скорости замкнутой системы с П-регулятором в 400 раз больше, чем разомкнутой системы. Перепад скорости разомкнутой системы  следовательно, замкнутая система с П– регулятором скорости обеспечит перепад скорости  В задании точность поддержания скорости перемещения груза определена значением  Таким образом, угловая скорость вращения двигателя прямо пропорциональна линейной скорости перемещения груза, поэтому точность поддержания угловой скорости вращения двигателя равна заданной точности поддержания линейной скорости перемещения груза. Следовательно, допустимое отклонение угловой скорости вращения двигателя составляет  Вывод: Система с П-регулятором скорости не обеспечит требуемую точность поддержания скорости. Расчет параметров скоростного контураКоэффициент усиления регулятора и его параметры при настройке на технический оптимум по управляющему воздействию рассчитываются по формуле:  Определим величину входного сопротивления R1 и сопротивления обратной связи усилителя Rос пропорциональной части регулятора. Если принять R1=500 кОм, то  Принимаем  Постоянная времени Т0 интегральной части принимается равной  а емкость  Передаточная функция ПИ– регулятора скорости имеет вид:   Передаточная функция разомкнутой по скорости системы с регулятором скорости   Передаточная функция замкнутой по скорости системы с датчиком скорости в цепи обратной связи, коэффициент передачи которого kΩ:     Рис.7. Передаточная функция контура в Simulink 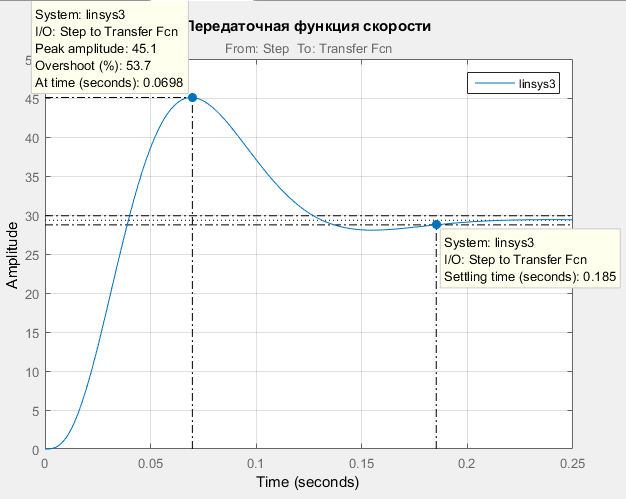 Рис.8. Промоделированная передаточная функция При таком регуляторе при скачке входного сигнала перерегулирование по угловой скорости составит 53.6%. Перерегулирование (σ) можно уменьшить установкой на входе регулятора скорости инерционного звена (фильтра) с передаточной функцией  Передаточная функция системы ЭП с замкнутыми токовым и скоростным контурами и входным фильтром     Рис.9. Передаточная функция контура в Simulink 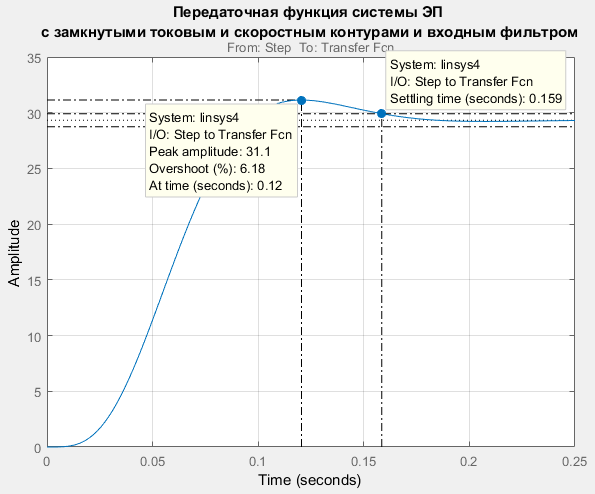 Рис.10. Промоделированная передаточная функция Получаем перерегулирование 6.18%, что соответствует техническому оптимуму. Время перерегулирования увеличено. Характеристическое уравнение контура скорости при ПИ– регуляторе и входном фильтре получается четвертого порядка. ВыводДля заданных параметров был выбран двигатель ДПЦЯ-3, и рассчитана силовая схема усилителя мощности. Выбран трансформатор ОСМ-0,160, шесть тиристоров типа ТЧ40, дроссель типа Д338. Был рассчитан КПД всей схемы равный 0,67 , который находится в тех пределах значений КПД, которые соответствует ЭП малой мощности. Для проверки были рассчитаны передаточные функции датчиков тока и скорости. Произведен синтез системы подчиненного регулирования с использование ПИ-регулятора. По полученным данным можно сделать вывод, что передаточная функция системы ЭП с замкнутыми токовым и скоростным контурами и входным фильтром полностью соответствует параметрам систем подчиненного регулирования. |