АС Двигатель. Асинхронный двигатель (2). Кафедра электроэнергетики
 Скачать 0.49 Mb. Скачать 0.49 Mb.
|

|
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ «ТЮМЕНСКИЙ ИНДУСТРИАЛЬНЫЙ УНИВЕРСИТЕТ» ИНСТИТУТ ПРОМЫШЛЕННЫХ ТЕХНОЛОГИЙ И ИНЖИНИРИНГА КАФЕДРА ЭЛЕКТРОЭНЕРГЕТИКИ Расчет параметров и построение характеристик АСИНХРОННОГО двигателя отчет по контрольной работе
Тюмень, 2022 1. Рассчитать асинхронный двигатель и построить рабочие и механическую характеристики. 2. Сравнить значения параметров асинхронного двигателя с короткозамкнутым ротором, полученные при номинальной мощности с данными, приведенными в таблице 1. Таблица 1 – Исходные данные
где Рн – номинальная мощность на валу; R1, R′2, X1, X′2 – активные и реактивные сопротивления обмоток статора и ротора, Ом; nн – номинальная частота оборотов, об/мин; - КПД, %; I0 – ток холостого хода, А; P0, Рмех – потери холостого хода и механические, Номинальное напряжение Uн = 380В; Параметры контура намагничивания (при Г-образной схеме замещения) следует определять путем использования формул (1-4):   2000 – 3 * 2000 – 3 * 0,0154 -700 = 1215,76 Вт 0,0154 -700 = 1215,76 Вт     с =1+   Скольжение определяется по формуле:   1. Ток ротора определяется по формуле:   = 298,045 A = 298,045 A2. Коэффициент мощности определяется по формуле:   3. Ток статора определяется по формуле:   где активная составляющая тока определяется по формуле:   274,8650 274,8650  Ток холостого хода определяется по формуле:   Полное сопротивление контура намагничивания определяется по формуле:   = 5,13 = 5,13  Реактивнаясоставляющая тока определяется по формуле:       = 0,3658 = 0,36584. Мощность, потребляемая из сети определяется по формуле:   = 180910,44 Вт = 180910,44 Вт5. Мощность на валу двигателя определяется по формуле:   где суммарные потери определяются по формуле:   = 11590,86 = 11590,86Электрические потери определяется по формуле:     Добавочные потери определяются по формуле:  Рдоб = 0,005* 100000  Вт Вт6. Вращающий момент двигателя определяется по формуле:   7. Коэффициент полезного действия определяется по формуле:   Производим расчет аналогично, изменяя скольжение двигателя S, полученные результаты записываются в таблицу №2 и строятся рабочие характеристики n = f(P2), М2 = f(P2), Р1 = f(P2), I1 = f(P2), S = f(P2), cosφ = f(P2), = f(P2) и механическая характеристика n = f(М2). Таблица 2 – Расчетные характеристики
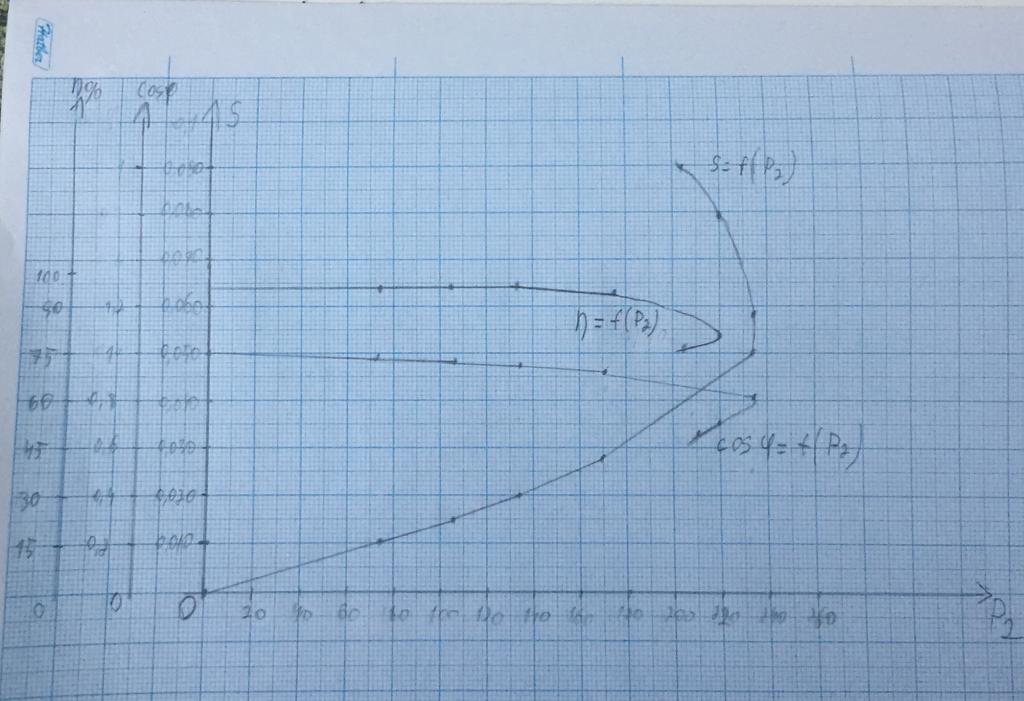 Рисунок 1 – Рабочая характеристика АД s = f(P2), Рабочая характеристика АД cosφ= f(P2), Рабочая характеристика АД = f(P2) 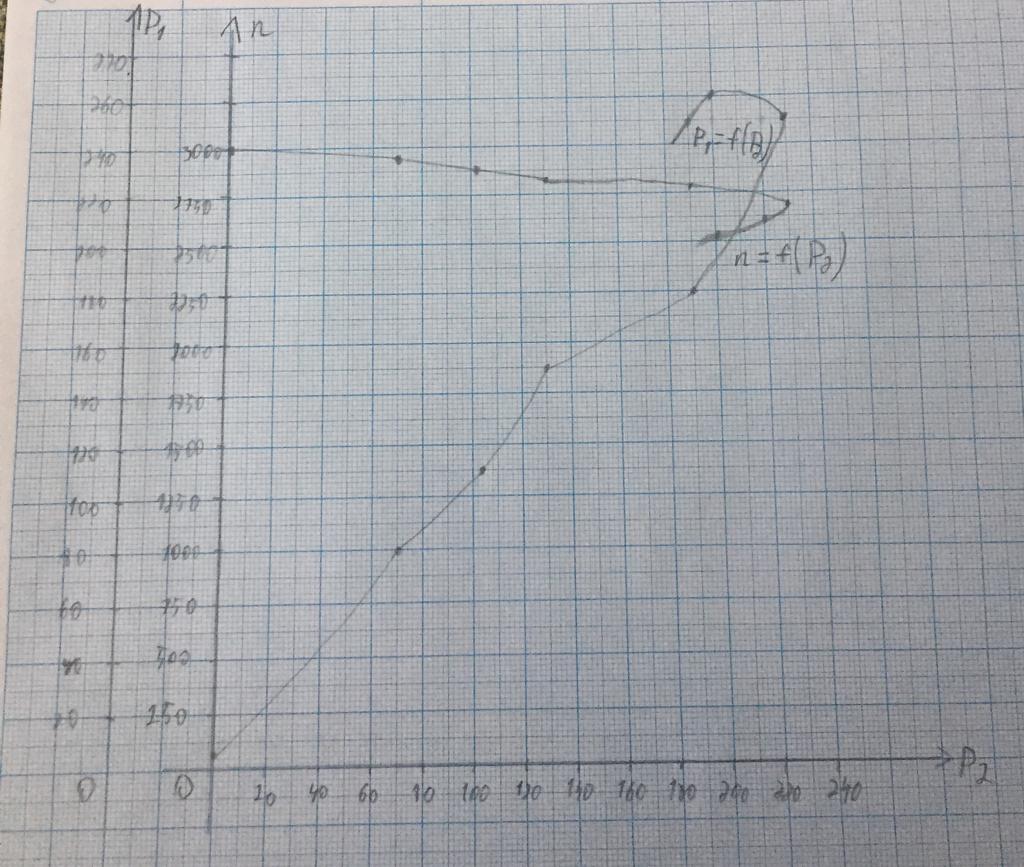 Рисунок 2 – Рабочая характеристика АД n = f(P2), Рабочая характеристика АД P1 = f(P2) 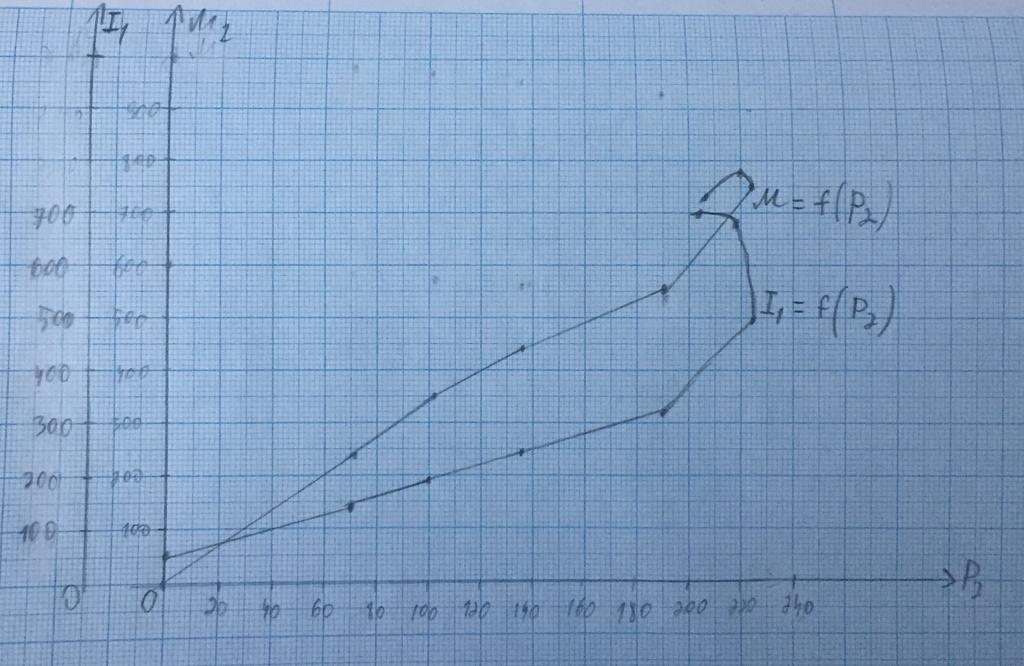 Рисунок 3 – Рабочая характеристика АД М = f(P2), Рабочая характеристика АД I1 = f(P2) 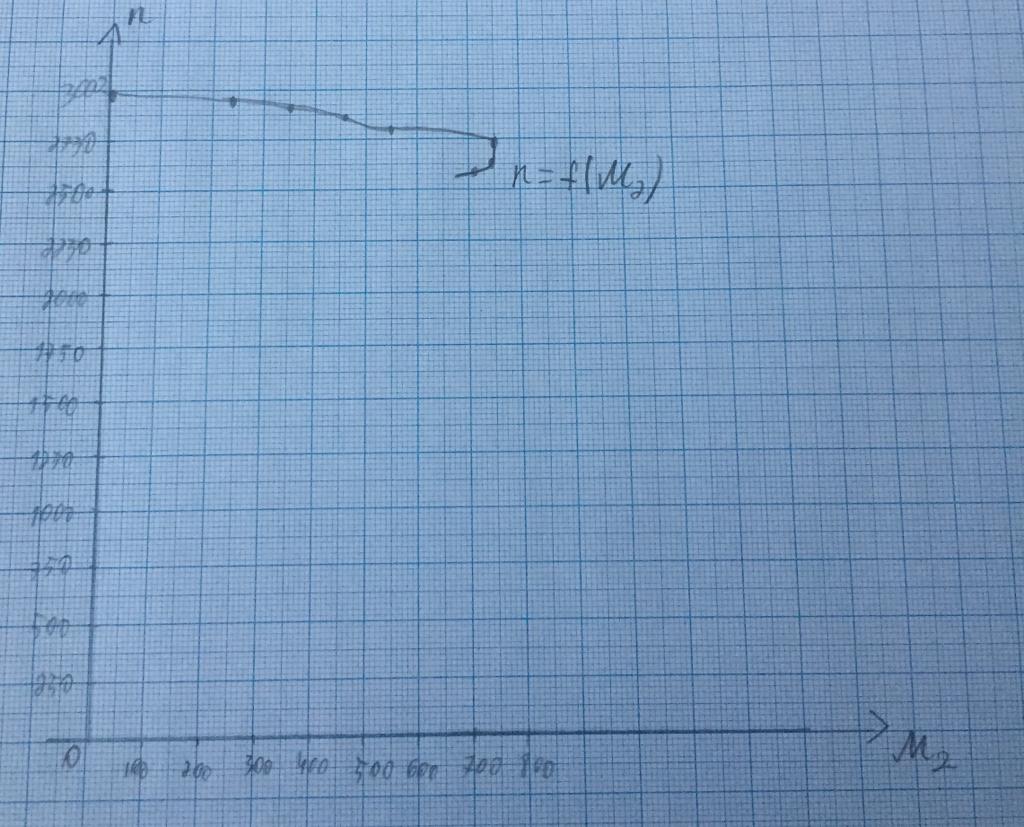 Рисунок 4 – Механическая характеристика АД n = f(М2) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||















 (об/мин)
(об/мин)