как с помощью сматфона управлять системой отопления. Как с помощью смартфона управлять системой отопления gsmтермометр (по сути gsmтермостат) Телеметрика
 Скачать 0.64 Mb. Скачать 0.64 Mb.
|

|
Как с помощью смартфона управлять системой отопления GSM-термометр (по сути – GSM-термостат) «Телеметрика» – простое и современное решение для управления домашней системой отопления – например, отопительным котлом или электроконвекторами – из любой точки мира. Удаленно дать команду поддерживать определенную температуру в помещении – это удобно. Основное назначение GSM-Термометра – удаленный контроль над отоплением, хотя возможности устройства гораздо шире – вплоть до контроля температурных режимов в серверных комнатах и управления морозильными камерами. Вместе с тем, основные пользователи – это владельцы загородных домов – те, кому более всего необходимо дистанционное управление отопительным котлом. Для работы устройства необходима лишь мобильная связь и возможность отправки СМС-сообщения.   GSM-Термометр – внешне напоминает обычный Wi-Fi-роутер, но интернет для его работы не нужен. Будет достаточно SIM-карты. GSM-Термометр позволяет удаленно управлять отоплением во всем доме. Кроме того, предусмотрено множество дополнительных вариантов применения. Устанавливаем приложение Чтобы удаленно управлять отоплением через GSM-Термометр, в специальный слот на приборе нужно установить SIM-карту, а потом зафиксировать номер SIM-карты термометра в приложении «Телеметрика» на смартфоне. Так оно узнает, куда отправлять команды управления.Мобильное приложение «Телеметрика» – бесплатное, работает с устройствами на базе Android и iOS. Процесс отправки команд удобный: данные, которые присылает устройство, сразу выводятся на экран, предусмотрены подсказки, что приятно. По сути, мобильное приложение – своего рода оболочка, которая делает управление термометром простым и понятным. Что делать, если телефон не поддерживает популярные операционные системы? У производителя на этот случай тоже предусмотрен вариант. Управлять тогда можно с помощью обычных СМС-сообщений с определенными командами. Что приятно, они вводятся на русском языке, на нем же прибор отправляет и ответные сообщения. GSM-Термометр работает в сетях GSM 900/1800.  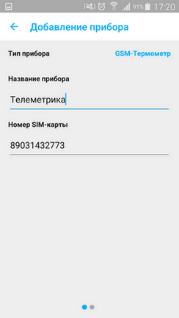 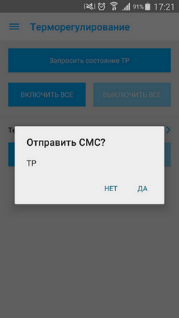  Как это работает у вас есть, газовый, к примеру, отопительный котел и помещение, где он установлен, назовем его котельной (хотя часто в домах это, например, кухня). Вы приобрели GSM-Термометр. Что делать дальше? Подключить его. Самостоятельная настройка не вызовет больших сложностей, однако «Телеметрика» также предлагает сервис по профессиональной установке оборудования. примерная схема действий по установке: Выбрать место для установки GSM-Термометра, монтировать его на стену и подключить к электропитанию Следуя электрической схеме, соединить управляющие клеммы GSM-Термометра с клеммами для подключения комнатного термостата на панели управления котла Установить датчик комнатной температуры в помещении и подключить его к GSM-Термометру Второй температурный датчик, входящий в комплект, можно установить на подающую трубу отопительного котла и затем настроить аварийное событие (через мобильное приложение) по критической температуре теплоносителя С помощью мобильного приложения «Телеметрика» настроить прибор и устанавить автоматический режим поддержания температуры 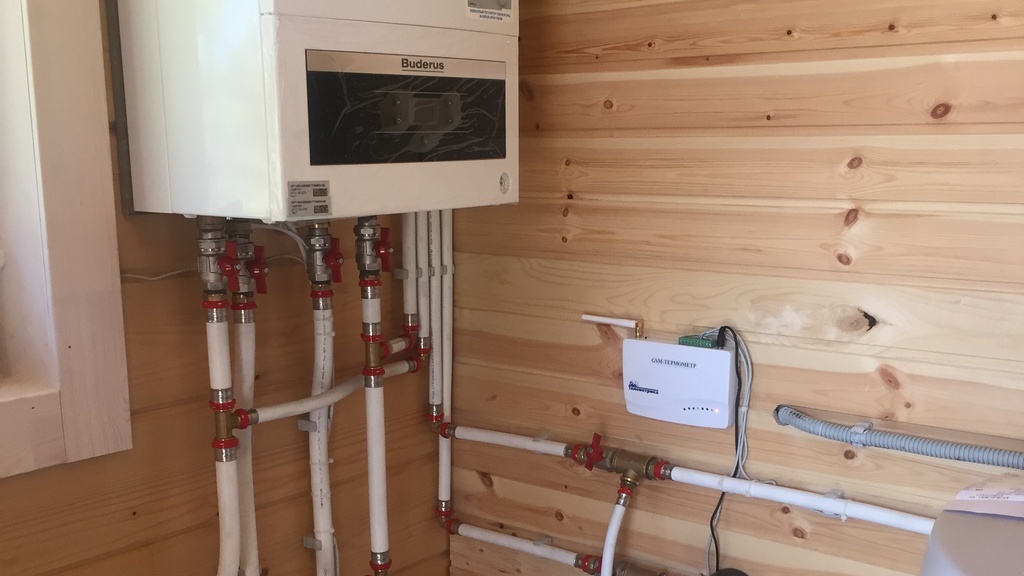 GSM-Термометр несложно настроить и подключить самостоятельно Отметим встроенный резервный аккумулятор – еще один приятный бонус от производителя. Штука полезная – в случае отключения электричества прибор сможет отправить сообщение об этом пользователю, а отопление в доме останется под контролем еще целых 12 часов. Зачем это нужноУдаленно контролировать домашнее отопление (газовые, дизельные, электрические котлы) Настраивать одновременную работу с несколькими контурами отопления Контролировать нужную температуру в различных помещениях (жилые, подсобные, серверные, сельхозназначения и т.д.) Контролировать температуру воды в бассейне Удерживать минимальную температуруы в доме, чтобы не промерзали коммуникации Подключать дополнительные электроприборы до 2,2 кВт (обогреватель, кондиционер и т.д.) Выполнять функции элемента охранной системы Что еще умеет гаджет Здорово, что можно контролировать работу котла, задавать нужную температуру из любой точки города и мира. Но этим возможности устройства не ограничиваются. На смартфон умный термометр присылает отчеты о температуре в помещении. Причем как по запросу, так и в авторежиме. Если он зафиксирует отклонения от заданных параметров – вы тут же об этом узнаете. Кроме того, при отключении электропитания в доме термометр немедленно отправит владельцу сообщение об этом. В комплекте поставки 2 датчика температуры. Всего к GSM-Термометру их подключается до 5 штук (остальные приобретаются дополнительно). То есть, можно установить нужную температуру для каждого отопительного контура, например, на разных этажах дома, или вывести датчик на улицу. И, конечно, информация о температуре с любого из них всегда будет у вас под рукой – в смартфоне. Таким образом, погода в доме корректируется по необходимости парой несложных действий. Цена на устройство на момент публикации статьи составляет 7 900 рублей, что значительно ниже стомости приборов аналогичного назначения от производителей отопительных котлов.  Введение Область мониторинга и дистанционного зондирования была революционизирована беспроводной сенсорной сетью. Беспроводные сенсорные сети могут собирать данные с различных датчиков, таких как температура, влажность, напряжение, ток и т.д., Из удаленных мест и совместно передавать данные через сеть на станцию управления (или там, где необходим анализ данных). Следовательно, беспроводные сенсорные сети могут использоваться для мониторинга данных об энергопотреблении даже из удаленных мест. Непрерывный мониторинг этих физических величин онлайн с пульта дистанционного управления помогает координировать бесперебойную работу технологических установок, отраслей промышленности и даже в бытовых коммунальных службах. Учитывая эти ситуации, в этом проекте была предпринята попытка отслеживать данные через беспроводную сенсорную сеть для измерения температуры и влажности. Все измеренные данные передаются с сайта на мобильное устройство (станцию управления) Экспериментальная установка включает в себя датчик температуры и влажности (DHT11), ЖК-дисплей, GSM-модуль SIM900A. Разработанные коды моделируются и тестируются с использованием программного обеспечения Arduino IDE и платы Arduino Uno [8-9]. Таким образом, разрабатывается беспроводная система, которая является автономной и может отслеживать, а также контролировать физические или экологические условия, такие как температура и влажность, и может передавать соответствующие данные на станцию управления. Беспроводная сенсорная сеть, представленная здесь, является двунаправленной, что позволяет контролировать активность датчика. Этот система состоит из различных блоков, которые собраны в единое целое и работают в ритме для точного анализа функционирования. Предлагаемая система собирает параметры температуры и влажности в различных помещениях с помощью беспроводных сенсорных сетей в диапазоне от 0°C до 50°C и 20%-90% относительной влажности соответственно. Поскольку эта система оснащена датчиками, обладающими высокой чувствительностью наряду с компонентами, управляемыми с низкой задержкой и точностью; эта система очень надежна для различных применений, таких как мониторинг температуры и компьютерная периферия тепловая защита, применение на метеостанциях, а также система мониторинга теплиц. Методология Успешная реализация предлагаемой беспроводной сенсорной сети включает датчик температуры и влажности (DHT11) в помещениях, где осуществляется онлайн-мониторинг. Датчик соединен с платой разработки Arduino UNO. Программирование на плате Arduino преобразует аналоговый выход датчика в цифровую форму. Цифровые значения температуры и влажности отображаются на ЖК-дисплее. После этого цифровая информация передается в GSM-модуль, который взаимодействует как периферийное устройство последовательной связи с Arduino. GSM-модуль, сопряженный с Arduino, будет передайте данные на мобильное устройство с помощью SMS. Кроме того, пороговая температура устанавливается в Arduino с помощью программирования, которое анализирует повышение температуры за пределами порога. Как только пороговое значение будет достигнуто, периферийные устройства охлаждения (двигатель постоянного тока 5 В, работающий в качестве вентилятора) автоматически включаются для поддержания температуры, и на мобильное устройство отправляется предупреждающее SMS-сообщение с отображением его значения на ЖК-дисплее. Arduino и GSM shield питаются от адаптеров постоянного тока ers/USB. Остальные все компоненты в настройках питаются от Arduino (+5 В). На моей диссертации экспериментальная установка содержит – • Блок датчиков – Датчик температуры и влажности (DHT11) • Блок обработки – Микроконтроллер (ATMEGA 328P) • Блок связи – GSM-экран (передатчик) и мобильное устройство (приемник) • Блок питания – Тесто DHT11 — это цифровой датчик влажности и температуры, состоящий из термистора и емкостного датчика влажности. Также датчик содержит в себе АЦП для преобразования аналоговых значений влажности и температуры. Датчик DHT11 не обладают высоким быстродействием и точностью, но зато прост, недорог и отлично подходят для обучения и контроля влажности в помещении Технические характеристики датчика DHT11 • Питание: DC 3,5 – 5,5 В • Ток питания: в режиме измерения 0.3mA. В режиме ожидания 60μA • определение влажности 20–80 % с точностью 5 • определение температуры 0–50 °С с точностью 2 % • частота опроса не более 1 Гц (не более одного раза в 1 сек.) • размеры 15,5´12´5,5 мм ကျတော်ရဲ့ စာတမ်းပြုစုမှု 2. Теоритическая структурная схема цифровой регулятор температуры на микроконтроллере ArduinoTheoretical block diagram of a digital temperature controller on an Arduino microcontroller Идея системного управленияThe idea of systemИнженерия управления связана с управлением динамической ( dynamic = ရွှေ့လျားအားနှင့်ဆိုင်သော)системой или объектом. Динамическая система может представлять собой механическую систему, электрическую систему, жидкостную систему (a fluidsystem), тепловую систему (a thermal system)или комбинация двух или более типов систем (a combination of two or more types of systems) . Поведение ( behavior - အလေ့အထ )динамической системы описано ( described ) по дифференциальным уравнениям ( differential equations ). Учитывая ( withdueregardorgivenလို့ပေးနိုင် )модель ( Given the model ) (дифференциальное уравнение), входные и исходные (initial = မူလ/မူရင်း ) в условиях, мы можем легко рассчитать выход системы. Объект может иметь один или несколько входов и один или несколько выходов. Обычно объект является системой непрерывного времени ( a continuous time system ), где входы и выходы также непрерывны во времени. Например, электромагнитный двигатель ( an electromagnetic motor ) - это объект непрерывного времени, чей ( whose – котопый ) вход (ток или напряжение) и выход(вращение – rotation or turning လှည့်ခြင်း ) также являются непрерывными сигналами. Инженер по управлению управляет входными переменными ( the input variables ) и формирует ( shapes) реакцию ( response ) объекта в попытке повлиять на выходные переменные так, чтобы требуемая реакция может быть получен. ( shapes the object's response in an attempt to influence the output variables so that the desired response can be obtained.) Объект представляет собой систему с разомкнутым контуром, в которой входы применяются для управления выходами. Например, напряжение подается на двигатель, чтобы заставить его вращаться ( Forexample, voltageisappliedtothemotortomakeitrotate). В разомкнутой системе нет знаний системного выхода. Ожидается, что двигатель будет вращаться при подаче напряжения на его терминалы, но мы не знаем, насколько он вращается, так как нет никаких знаний о выход системы. Если вал двигателя нагружен и двигатель замедляется, то нет знание об этом. Объект может также иметь нарушения, влияющие на его поведение и в разомкнутой системе нет способа узнать или минимизировать эти помехи. На рисунке 2.1 показана система с разомкнутым контуром, в которой системный вход должен управлять системой вывод в известную точку (например, для вращения вала двигателя с заданной скоростью). Это один вход, система с одним выходом (SISO), поскольку имеется только один вход, а также доступен только один выход. В целом, системы могут иметь несколько входов и несколько выходов (MIMO). Из-за неизвестные в модели системы и влияние внешних возмущений на разомкнутый контур управления не привлекательно .Существует лучший способ управления системой, используя датчик измерить выход, а затем сравнить этот результат с тем, что мы хотели бы видеть на системный выход. Разница между желаемым выходным значением и фактическим выходным значением называется сигналом ошибки. Сигнал ошибки используется для принудительного вывода системы в такую точку что желаемое выходное значение и фактическое выходное значение равны. Это называется замкнутым контуром управления или контроль обратной связи. На рисунке 2.2 показана типичная замкнутая система. Один из преимущество управления с обратной связью заключается в способности компенсировать помехи и правильный выход даже при наличии помех. Контроллер (или компенсатор) обычно используется для чтения сигнала ошибки и управления объектом таким образом, что ошибка стремится к нулю 1.1 История автоматического управленияИзвестны системы автоматического управления обратной связью ииспользуется уже более 2000 лет, некоторые из самых ранних примеровводные часы описал Витрувий и отнести к Ktesibios (около 270 года до н. э.). Примерно триста лет спустя цапля Александрийский описал ряд автоматов, которые использовали разнообразие механизмов обратной связи. Слово "обратная связь" - 20-е неологизм века, введенный в 1920-е годы радиоинженерами в опишите паразитический, положительный подавать назад сигнала от выход усилителя на входную цепь. Она вступила в общее употребление в англоязычном мире во время последнего половине века. Автоматическая обратная связь находится в широком диапазоне систем; Руфус Ольденбургер, в 1978 году, когда вспоминал об основании ИФАК, прокомментировал как название, так и широту тема: "я чувствовал, что выражение" автоматический контроль " охватывает все системы, потому что все системы включают переменные, и одна из них связанные с сохранением этих переменных на постоянном или заданном различные значения. Это составляет о контроле над ними переменные величины даже если никакие фактические механизмы автоматического регулирования не могут быть намеренно или иным образом включены в эти системы. Я был мышление биологического, экономического, политического как мы \ 1 как инженерия системы, так что я представлял себе область применения fifac как очень широкую." Это обстоятельство создает трудности для историков предмета. (и для редакторов контрольных журналов), и эта статья не попытайтесь охватить все области применения. История ТГК автоматического управления делит удобно в четыре основных периода:: * Ранний Контроль: До 1900 Года • Доклассический Период: 1900-1940 • Классический Период: 1935-1960 * Современный Контроль: После 1955 Года Хотя на ТГК повлияло направление некоторых послевоенных работ благодаря прозрениям и новым пониманиям, полученным в ходе войны, траектория развития, Алистер Макфарлейн Дж. (1979) утверждает, что во многом определялось двумя факторами: Во-первых, проблема, которую правительства считают важной. запуск, маневрирование, наведение и сопровождение ракет и космических аппаратов; а во-вторых, с появлением цифрового компьютера. Этот первая проблема заключалась в основном в контроле баллистических объектов, и следовательно, подробные физические модели могут быть построены в терминах дифференциальные уравнения, как линейные, так и нелинейные; также измерять аппаратуры и другие компоненты большой точности и точности может быть разработан и использован. Инженеры, работающие в аэрокосмическая промышленность, следуя примеру Пуанкаре, обратимся к формулировке общих дифференциальных уравнений в терминах из множества уравнений первого порядка и, таким образом, начался подход, который стал известен как подход "государство-пространство". Между 1948 и 1952 Ричард Беллман, работающей в математический факультет корпорации RAND, изучал проблема определения распределения ракет по целям, с тем чтобы нанести ТГК максимальный урон. Эта работа привела его к формулировке "принцип оптимальности" и к динамическому программированию. Этот выбор имени был, согласно учетной записи, опубликованной в 1984 году, по политической целесообразности. Исследование было ВВС, но тогдашний министр обороны имел отвращение к слову "исследование" и предполагалось, что он еще большее отвращение к математическим исследованиям, , и еще есть слово с положительными коннотациями, и программирования считалось более приемлемым такое планирование. (Имена важно, и оглядываясь назад на 50 лет, кажется, что использование имен управления, автоматического управления, и системная инженерия не достигла для нашего предмета признания что может быть ожидается. Такие названия, как кибернетика и робототехника командует большей степенью узнавание и видимое понимание.). В конце 1950-х годов Беллман начал работать над теория оптимального управления, сначала с использованием вариационного калеулюса но позже, из-за краевой задачи, присущие исчисление вариаций подход, стремящийся сформулировать детерминистский задачи оптимизации таким образом, чтобы они могли быть решена с помощью динамического программирования. Его проницательность была к scc что, применяя ту или иную систему политикой управления плиточный Двадцать два достигните области в пространстве состояний, и будет указано осталось немного времени. Сформулированная таким образом, проблема может быть рассматривается как многоступенчатый процесс принятия решений. Работа с Стюарт Дрейфус. Bcllman разработал компьютерные программы для производствачисленные решения ряда задач и результаты были опубликованы в 1962 году. Основная трудность с динамическим программирование-это проблема размерности, и даже если теперь у нас есть вычислительная мощность, намного превосходящая все, что доступно Беллман и Дрейфус нам все еще нужно использовать приближения к обрабатывать сложные системы. А также с учетом точности позиционирования, требований к производительности также включают ограничения, выражаемые как оптимизация требования; например, достижение указанной позиции в минимуме время, или проведение комплекса маневров с минимальным количеством топлива потребление. Поэтому внимание вновь сосредоточено на ТГК. дифференциально-уравнительный подход к анализу и проектированию АСУ. Динамические задачи, связанные с минимизацией или максимизация некоторого индекса производительности имеет " очевидный и сильная аналогия с классическими вариационными формулировками аналитическая механика Лагранжа и Гамильтона." Этот обобщение подхода Гамильтона к геометрической оптике Понтрягин (1956), в виде своего максимального принципа, заложил основы теории оптимального управления. Это и Беллмана понимание ценности и полезности концепции государства формулирование и решение многих проблем контроля и принятия решений привело к обширным и глубоким исследованиям математических задач автоматического управления. И растущая доступность цифровых технологий компьютер в конце 1950-х годов сделал рекурсивный алгоритмический решение возможно (в отличие от поиска закрытой формы решение в классическом подходе). Майкл Атанс поместил происхождение того, что теперь называется к такой современной теории управления, как 1956 год, и в сентябре того же года год Международная конференция по автоматическому контролю, организованная Объединенным комитетом контроля VDI и VDE, был проведен в Гейдельберг, Германия. В ходе конференции группа делегатов договорились создать международную организацию для содействия прогресс в области автоматического управления и организации группа-Бройда (Франция), председатель, Гребе( Германия), Летов (СССР), Новацки (Польша), Олденбургер (США) Уэлборн (Великобритания), с Руппелем (Германия) в качестве секретаря-был обвинен в разработка планов создания Международной федерации. Организация, Международная федерация автоматического управления (ИФАК), был официально сформирован на mceting, состоявшемся в Париже в сентябре. II и 12 1957,. Также были выбраны участники Гарольд каштан, как первый председатель, А. М. Летов и В. Бройда избраны заместителями председателя, Г. Руппель в качестве секретаря и Г. Леманн в качестве казначея. На на этом заседании российский делегат направил приглашение провести первая конференция в Москве в 1960 году. Московская конференция была важной и заметной символ медленно развивающегося изменения направления в течение 1950-х годов, и вполне уместно, что на конференции Калман представил доклад "об Общей Теории Управления Системы", которые ясно показали, что глубокая и точная двойственность существовало между проблемами muitivariable управления обратной связи и многопараметрическая фильтрация обратной связи, следовательно, вступил в новый обработка задачи оптимального управления. Обратимся ко второму влиянию Макфарлана на развитиеиз современного управления-цифровой вычислительной машины-мы находим, что основное влияние в течение 1950-х и 1960-х годов было поддерживать теоретические расследования и, в частности (используя определение Wonham) синтезирование. Разработка и внедрение практических на системы гораздо сильнее повлияла " замена электронных трубок полупроводниками, такими как диоды, транзисторы и тиристоры пятидесятых годов", - прокомментировал Гереке., и замена механических и электрических компонентов с помощью твердотельных и микроэлектрического устройств. К началу 1960-х годов цифровой компьютер был использован он-лайн для сбора данных, для оптимизация и контроль (Monsanto Chemical Компании, Лулинг, Луизиана., 1960) и в ограниченном числе применения Для сразу цифрового управления, например, на заводе ICI во Флитвуде в Великобритании в 1962 году. Однако. его широкое использование ибо он-лайн контроль не осуществлялся до начала 1970-х годов. Ведущий защитник использования цифровой вычислительной машины был Дональд П. Экман, который в начале 1950-х годов убедить несколько компаний для поддержки научно-исследовательской программы базируется в Технологическом институте кейса, Кливленд, Огайо. Этот программа, первоначально называвшаяся "автоматизация процессов", была переименована "Управление сложными системами", потому что Экман хотел отличить то, что он делал, от популярного образа автоматизации, имеется в виду механизация производства и перемещение рабочей силы. К концу десятилетия Экман был аргументируя в поддержку "системной инженерии" идею о том, что то, что промышленность нуждалась в инженерах с " широким фоном [резка] через обычные границы физической инженерии и математические науки" и с " умением подходим к задачам аналитически, чтобы свести физические системы к соответствующая математическая модель, к которой вся мощь математической манипуляция, экстраполяция и интерпретация могут быть прикладная." Система контроля температурыТемпература — физическая величина, характеризующая термодинамическую систему и количественно выражающая интуитивное понятие о различной степени нагретости тел. Система управления - это устройство или набор устройств, которые управляют, или регулируют поведение других устройств или систем. Регулирование температуры - это процесс, в котором изменение температуры пространства (и объектов, находящихся вместе внутри) или вещества измеряется или иным образом (otherwise determined) определяется, и прохождение тепловой энергии в пространство или из него регулируется для достижения желаемая температура. Использование автоматических систем контроля температуры началось еще в 18 веке. Идея была задумана Уорреном С. Джонсоном, когда он преподавал в Норманнской школе в Оклахоме. До этого дворники - должны были войти в каждую классную комнату, чтобы определить, было ли это слишком жарко или слишком холодно, а затем соответствующим образом отрегулировать амортизаторы - absorbers в подвале- in the basement. Джонсон искал способ положить конец или, по крайней мере -at least, минимизировать перерывы в работе уборщиков в классе и повысить - increase уровень комфорта студентов. Автоматическая система контроля температуры должна была удовлетворить – fulfill ဖြည့်ဆည်းသည်ပြည့်စုံစေသည် эту потребность – this need. В 1883 году Уоррен Джонсон бросил учение, чтобы полностью посвятить – dedicate နှစ်မြုတ်ထား свое время исследованию и развитию своих идей. Он переехал в Милуоки и в 1885 году основал компанию Johnson Electric Service Company. В 1895 году Джонсон запатентовал пневматическую систему контроля температуры. Это учитывало температурный контроль по комнатам в зданиях и домах. Это было первое такое устройство в своем роде. К началу 20-го века Автоматическая система контроля температуры использовалась во многих известных местах, включая Нью-Йоркскую фондовую биржу, Дворцы Испании и Японии, Вест-Пойнт, Смитсоновский институт, Капитолий США и дом Эндрю Карнеги. Использование этой системы постоянно увеличивается по сей день. 21 век был встречен очень непредсказуемыми и неблагоприятными температурными условиями. Эффект зеленого дома оставил наш мир открытым, и это привело к множеству неопределенностей в наших погодных условиях и климате в целом. Существует растущая потребность в поддержании температуры в определенных районах в пределах определенного диапазона. Это требовало потребности для систем контроля температуры. в домах: в много современных домов, допустимый предел рассыпки вещества еды увеличивал значительно. Это связано с тем, что температура в зоне хранения дома поднималась выше или опускалась ниже определенного допустимого максимального или минимального значения соответственно, что приводило к ускоренному разложению пищевых материалов. В дополнение к этому, некоторые зоны дома должны быть отрегулированы в пределах некоторых обитаемых температур (т. е. не слишком высоко и не слишком низко). Это обеспечивает что жизненные процессы могут быть унесены людьми удобно в тех областях. |