Авдеев И.Д.. Кинематический расчет привода. 4 Определение передаточного числа привода и его ступеней 5
 Скачать 196.5 Kb. Скачать 196.5 Kb.
|

СодержаниеСодержание 1 Введение. 1 Кинематический расчет привода. 4 Определение передаточного числа привода и его ступеней 5 Силовой расчет привода 6 Выбор стандартного редуктора 7 Заключение. 7 Список литературы. 8  \ Авдеев И.Д. Мищенко Е.В. Введение.Ленточный конвейер — транспортирующее устройство непрерывного действия с рабочим органом в виде ленты.  На сегодняшний день это один из наиболее перспективных видов транспорта, который практически незаменим при больших грузопотоках. Кроме того, ленточный конвейер является обязательной частью любого тяжелого и легкого производства. Он используется в металлургии, для транспортировки сыпучих материалов, в пищевой промышленности, медицине и так далее. Принцип действия и устройство во всех случаях практически одинаковые. Отличия могут заключаться в виде ленты, ее грузоподъемности и гибкости, а также мощности привода. В большинстве случаев такого рода конвейер позволяет частично автоматизировать производство и сократить количество ручного труда. С учетом этого рассматриваемым транспортируемым машинам предъявляются жесткие требования. По большей части это касается прочности, производительности и взаимозаменяемости изношенной ленты. Агрегаты способны работать при диапазоне температур от -50 до +45, что обуславливается техническими характеристиками несущего органа. На сегодняшний день это один из наиболее перспективных видов транспорта, который практически незаменим при больших грузопотоках. Кроме того, ленточный конвейер является обязательной частью любого тяжелого и легкого производства. Он используется в металлургии, для транспортировки сыпучих материалов, в пищевой промышленности, медицине и так далее. Принцип действия и устройство во всех случаях практически одинаковые. Отличия могут заключаться в виде ленты, ее грузоподъемности и гибкости, а также мощности привода. В большинстве случаев такого рода конвейер позволяет частично автоматизировать производство и сократить количество ручного труда. С учетом этого рассматриваемым транспортируемым машинам предъявляются жесткие требования. По большей части это касается прочности, производительности и взаимозаменяемости изношенной ленты. Агрегаты способны работать при диапазоне температур от -50 до +45, что обуславливается техническими характеристиками несущего органа. Главный плюс ленточного конвейера заключается в том, что с его помощью можно транспортировать грузы на очень большое расстояние. В некоторых случаях длина грузонесущего органа может достигать 3-5 километров. Никакой другой конвейер не может быть таким длинным. Обусловлено это большим весом, сложной конструкцией и, что самое главное, высокой стоимостью оборудования. В случае с ленточным конвейером нет никаких проблем. Еще одно неоспоримое достоинство заключается в высокой производительности. Иногда скорость может достигать 6-10 м/с, при ширине ленты 2,4-3,0 метра. В этом случае производительность может превышать 20-30 тысяч тон в час. Кроме того, ленточный конвейер относится к универсальным транспортирующим линиям. Обусловлено это тем, что можно перемещать самые различные грузы. Еще одно важное достоинство – возможность перемещения грузов в наклонном положении. С увеличением угла и длительности конвейера уменьшается его скорость. Стоит сказать о том, что есть и существенные недостатки, ограничивающие сферу применения транспортирующих устройств такого типа. Основной минус – высокая цена ленты и роликов. В большинстве случаев тяговый и грузонесущий орган обходится примерно в 30% от общей стоимости установки, что немало. Хотя тут многое зависит от назначения, а также технических характеристик (материал, количество слоев и т.п.). Еще один недостаток заключается в том, что барабан ленточного конвейера движет ленту при помощи трения. Это ограничивает угол подъема, поэтому он не может превышать 20 градусов. Помимо этого, достаточно проблематично перемещать пылевидные грузы, которые в процессе движения могут частично улетучиваться и рассыпаться. Затруднительно работать и при слишком низких температурах, как и при слишком высоких. Термической воздействие изменят характеристики гибкой ленты, а также приводит к разрушению.  Задание Д1 П 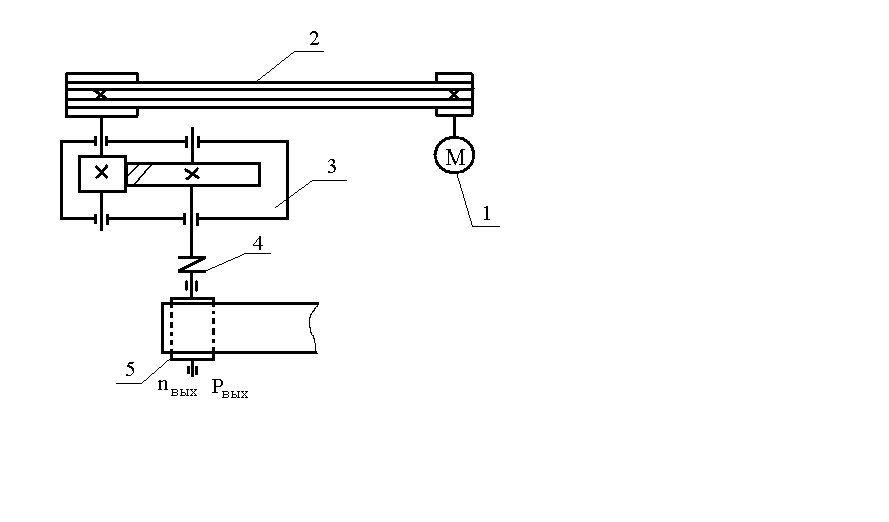 ривод ленточного конвейера для транспортировки штучных грузов ривод ленточного конвейера для транспортировки штучных грузов1 – электродвигатель; 2 – клиноременная передача; 3 – редуктор цилиндрический косозубый; 4 – муфта; 5 – приводной барабан Срок службы 5 лет Коэффициент суточного использования Ксут = 0,6 Коэффициент годового использования Кгод = 0,7
 Решение. Привод ленточного транспортера состоит из электродвигателя, клиноременной передачи, редуктора, муфты. Редуктор – это механизм, выполненный в виде отдельного агрегата, состоящий (в данном случае) из зубчатой цилиндрической передачи в корпусе, предназначен для уменьшения частоты вращения и, соответственно, повышения крутящего момента ведомого вала по сравнению с ведущим. Кинематический расчет привода.Находим требуемую мощность электродвигателя по формуле: Находим общий КПД привода по формуле: Находим требуемую частоту вращения вала электродвигателя по формуле:  Подбираем электродвигатель по полученным данным:  . Это электродвигатель АИР90LB8/715 Расшифруем обозначение двигателя: АИР – (А – вид двигателя – асинхронный; И – серия, унифицированная среди стран – членов Интерэлектро; Р – сверка мощности с установленным размером по РС 8031071) 90 - высота оси вращения (габарит), LB - установочный размер по длине станины; 8 - число полюсов, 750 – обороты электродвигателя. Определение передаточного числа привода и его ступенейПосле выбора электродвигателя определяют общее уточненное передаточное число привода иобщ. ут Силовые и кинематические параметры привода рассчитываем из требуемой мощности электродвигателя Рдв. треб. и его номинальной частоты вращения nдв. табл. при установившемся режиме. Пронумеруем валы: 1 – вал двигателя 2 – быстроходный вал редуктора, 3 тихоходный вал редуктора, 3 – вал приводного барабана (выходной вал). Силовой расчет приводаОпределяем частоты вращения валов с учётом передаточных чисел передач привода, зная, что муфта не меняем частоту вращения валов: Определяем частоту вращения валов привода: n1=nдв. табл.=715 (об/мин)  Определяем крутящий момент на валах привода:
|