Вариант 4. Код программы представлен ниже
 Скачать 99.07 Kb. Скачать 99.07 Kb.
|

|
Выполнение: Выполняем задание в Matlab. Для этого для каждого исследуемого значения  задаем характеристики передаточной функции звена второго порядка. задаем характеристики передаточной функции звена второго порядка. Код программы представлен ниже: % Исходные значения k = 5; T1 = k/30; T2 = k/10; eps = 0.0; %% Создаем LTI-объект с именем "w" и указываем значения коэффициентов ПХ w = tf([k],[T1*T2 T2*eps 1]) % Построение переходной характеристики figure('color','white'); step(w); grid on; Для каждого случая определяем основные параметры переходной характеристики. Время регулирования – время, когда колебания регулируемой величины перестают превышать 5% от установившегося значения. Перерегулирование вычисляется по формуле:  Колебательность переходного процесса определяется числом колебаний регулируемой величины за время регулирования. Частота колебаний равна:  где Т – период колебаний. Амплитуда колебаний – максимальное отклонения равновесия за время регулирования.  Р 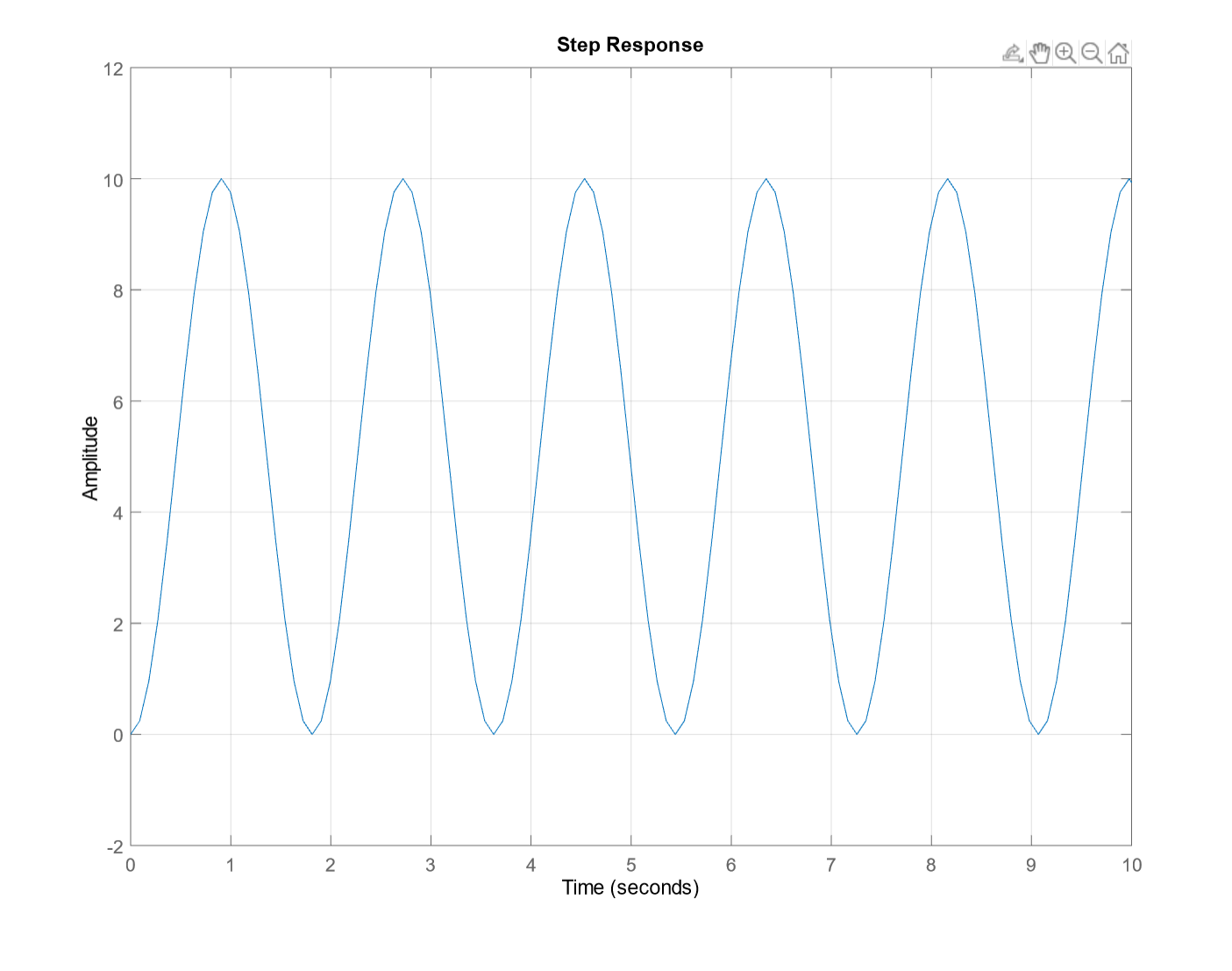 исунок 1 – Передаточная характеристика апериодического звена второго порядка при  . .Видим, что переходная характеристика носит колебательный характер, период колебаний  , угловая частота , угловая частота  , амплитуда колебаний A=5. , амплитуда колебаний A=5. |