Курсовая. Комплексный анализ плоского рычажного механизма
 Скачать 340.85 Kb. Скачать 340.85 Kb.
|

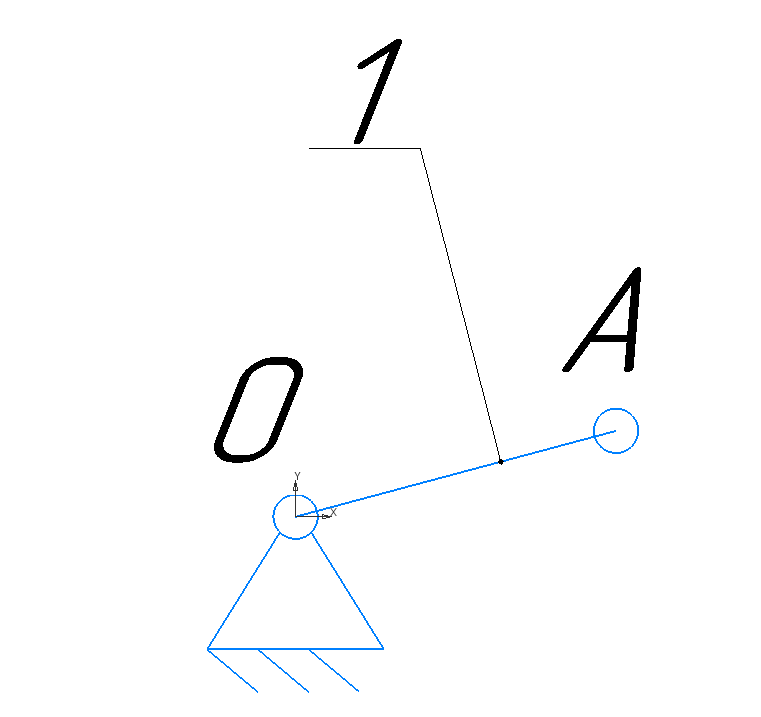
 ИНСТИТУТ МЕЖДУНАРОДНОГО И ДИСТАНЦИОННОГО ОБРАЗОВАНИЯ КАФЕДРА ТЕХНИКИ И ТЕХНОЛОГИИ Отметка о допуске к защите  Оценка за защиту Оценка за защиту  КУРСОВАЯ РАБОТА по дисциплине Теория механизмов и машин  Тема: «Комплексный анализ плоского рычажного механизма» Тема: «Комплексный анализ плоского рычажного механизма»  Обучающийся: обучающийся 3 курса ИМиДО группы КТЗ-19  (обучающийся , курс, институт, группа) Чернявский Дмитрий Сергеевич (фамилия, имя, отчество)  Руководитель: Макаров Дмитрий Сергеевич Руководитель: Макаров Дмитрий Сергеевич(фамилия, имя, отчество) старший преподаватель кафедры техники и технологии(ученое звание, ученая степень, должность) Королев 2022 г. ИНСТИТУТ МЕЖДУНАРОДНОГО И ДИСТАНЦИОННОГО ОБРАЗОВАНИЯ КАФЕДРА ТЕХНИКИ И ТЕХНОЛОГИИ Рецензия на курсовую работу    Обучающийся Чернявский Дмитрий Сергеевич, Курс 3, группа КТЗ-19  Дисциплина «Теория Механизмов и машин» Тема курсовой: «Комплексный анализ плоского рычажного механизма» Рецензент Макаров Дмитрий Сергеевич  старший преподаватель кафедры техники и технологии  Работа допущена к защите « » 2022 г.  Дата защиты: « » 2022 г. Текст рецензии: Чернявскому Дмитрию Сергеевичу было задано написать курсовую работу по теме «Комплексный анализ плоского рычажного механизма» в которой должны быть проведены аналитически и графически структурный и кинематический анализ плоского рычажного механизма. Курсовая работа выполнена самостоятельно и соответствует выданному техническому заданию и требованиям, предъявляемым к курсовым работам.  Оценка за курсовую работу - Преподаватель: Макаров Д.С. (подпись) ЗАДАНИЕ НА ВЫПОЛНЕНИЕ КУРСОВОЙ РАБОТЫ по дисциплине «Теория механизмов и машин»  Обучающийся: Чернявский Дмитрий Сергеевич  Тема курсовой работы: «Комплексный анализ плоского рычажного механизма»   Дата выдачи задания: « » 2022 г.   Срок сдачи законченной работы: « » 2022 г. Исходные данные к курсовой работе: Провести комплексный анализ плоского рычажного механизма (Вариант №____ см. схему.) Курсовая работа состоит из графической части и пояснительной записки, включающие следующие разделы: 1. Структурный анализ; 2. Кинематический анализ Календарный график работы над курсовой работой на весь период выполнения с указанием сроков отдельных этапов: март-апрель 2022 гг.   Руководитель Макаров Д.С., (Ф.И.О.)   старший преподаватель кафедры техники и технологии (подпись)  Задание принял(а) к исполнению Чернявский Д.С. (Ф.И.О.) (подпись) Содержание1.Структурный анализ механизма 6 2.План положения механизма 8 3.Кинематический анализ 9 Структурный анализ механизма Кинематическая схема механизма и ее исходные данные, согласно выданному варианту на курсовой проект. 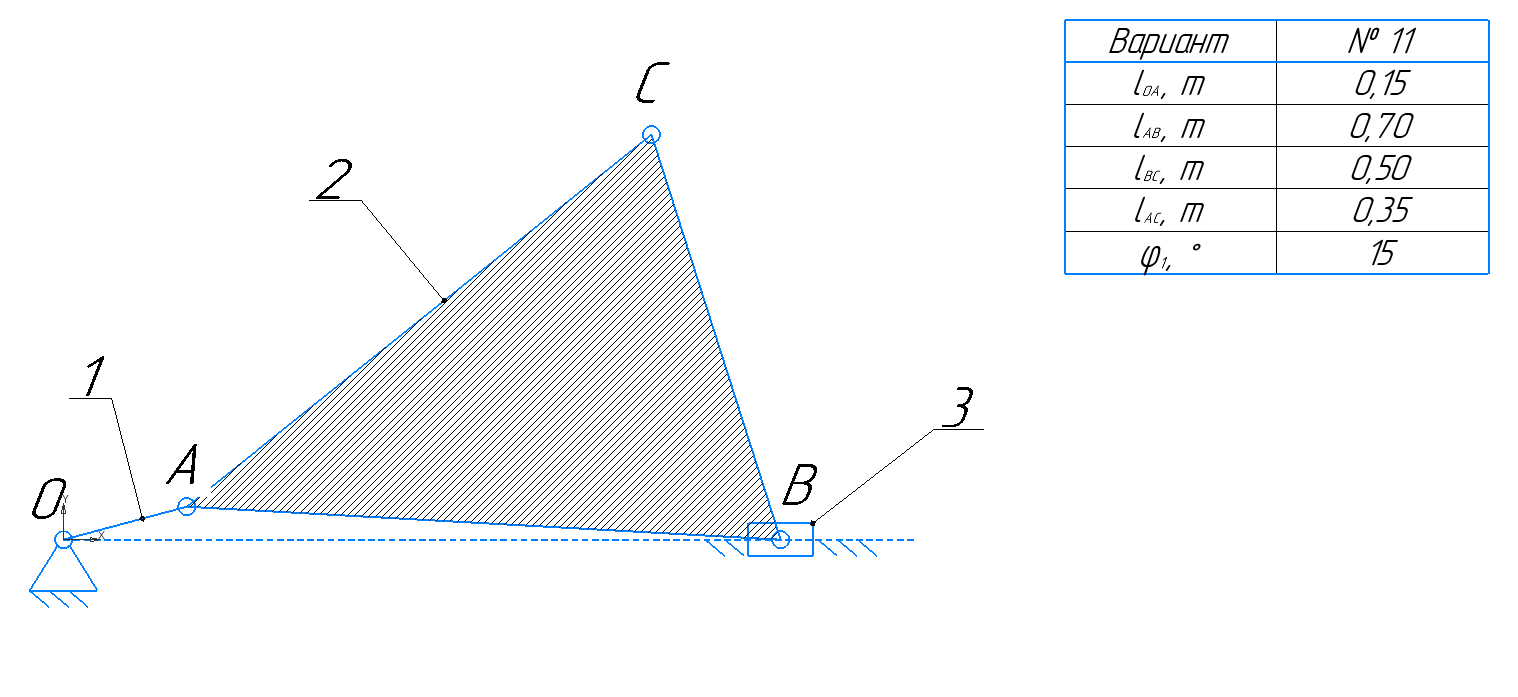 Рисунок 1. Мне был дан кривошипно-ползунный механизм 3-ого класса. На основании схемы я провел структурный анализ механизма на таблице 1.
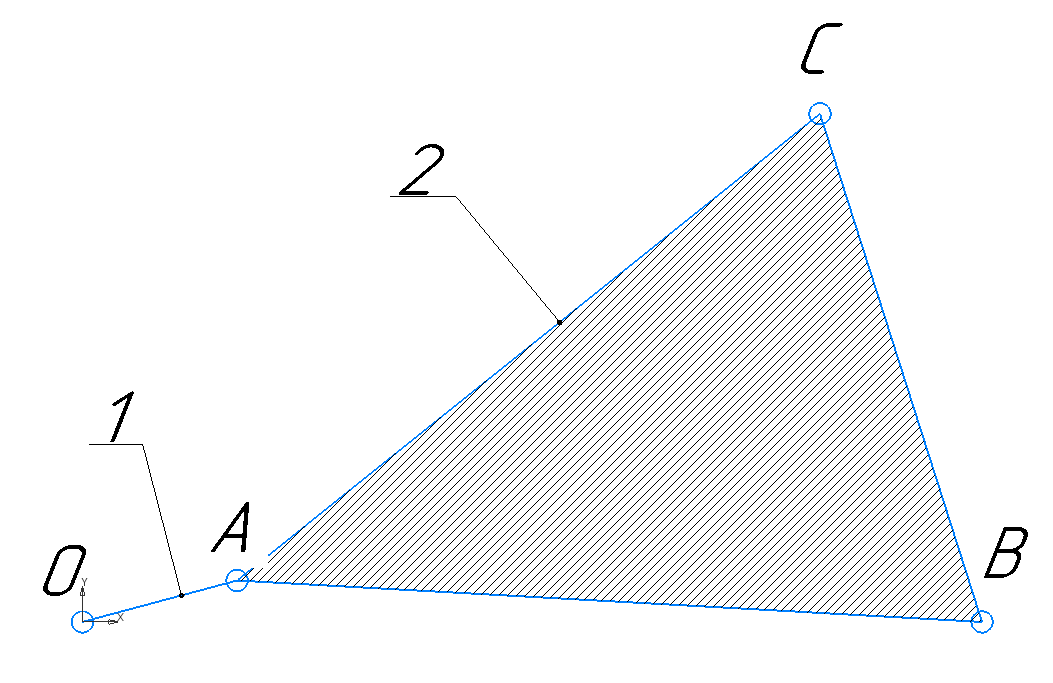
Таблица 1. План положения механизма 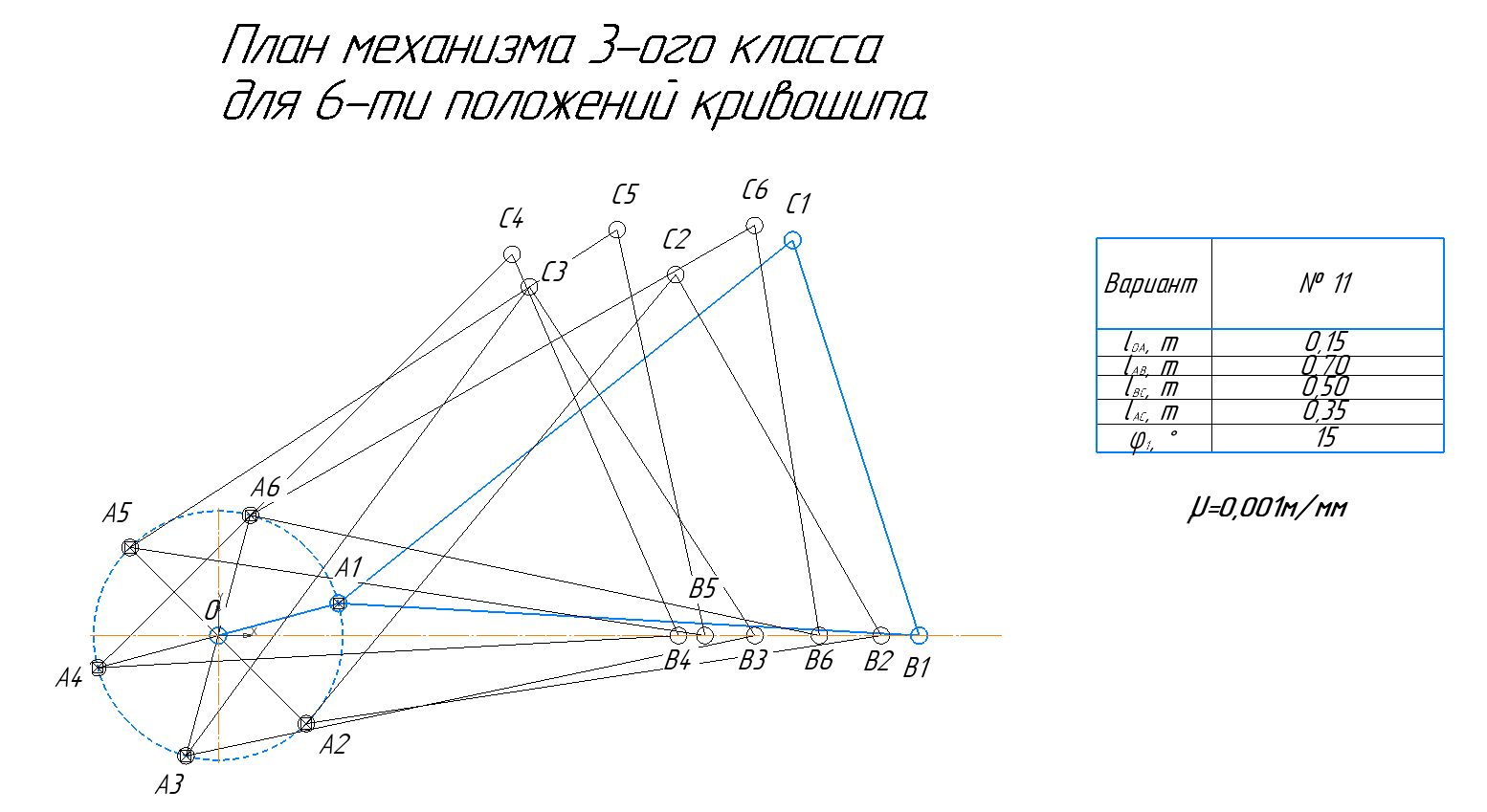 Рисунок 2. Из анализа данных таблицы 1 следует, что данная схема кривошипно-ползунного механизма представляет собой замкнутую кинематическую цепь, звенья которой образуют 4 пары 5-ого класса.  , а , а  . .Подставив найденные значения коэффициентов в структурную формулу Чебышева получим:  . .Кинематический анализ Расчет скоростей Частота вращения кривошипа ОA:  Угловая скорость звена 1:  Модуль вектора скорости точки А:  Масштабный коэффициент плана скоростей:  Длина вектора скорости точки А на плане скоростей:  Вектор скорости точки B:  = =  + +  – направлена горизонтально ⟂ АB – направлена горизонтально ⟂ АBab= 109,95мм, = *  = 109,95 * 0,01 = 1,01 м/с = 109,95 * 0,01 = 1,01 м/сab= 127,95мм, = * = 127,95 * 0,01 = 1,28 м/сВектор скорости точки С:  = =  + +  ⟂ ab= 109,95мм,  = * = 109,95 * 0,01 = 1,01 м/с = * = 109,95 * 0,01 = 1,01 м/сab= 127,95мм, = * = 127,95 * 0,01 = 1,28 м/с |