КОНТРОЛЬНАЯ РАБОТА по дисциплине: Электрические и электронные аппараты. кр аппараты. Контрольная работа по дисциплине Электрические и электронные аппараты Автор контрольной работы И. И. Иванов подпись, дата Обозначение контрольной работы Кр00000000. 00. 000000
 Скачать 452.5 Kb. Скачать 452.5 Kb.
|

|
Министерство науки и высшего образования Российской Федерации федеральное государственное бюджетное образовательное учреждение высшего образования « КОНТРОЛЬНАЯ РАБОТА по дисциплине: Электрические и электронные аппараты Автор контрольной работы ___________________________ И. И. Иванов подпись, дата Обозначение контрольной работы Кр–000000–00.00.00–00–00 Направление подготовки 13.03.02 Электроэнергетика и электротехника Руководитель работы преподаватель ___________________________ И. И. Иванов подпись, дата Саранск 2022 Министерство науки и высшего образования Российской Федерации федеральное государственное бюджетное образовательное учреждение высшего образования « ЗАДАНИЕ НА КОНТРОЛЬНУЮ РАБОТУ 1. Студент:. 2. Исходные данные: Задача №1. Определение размеров сечения токопродводящих шин. Токопродвод, подключенный к автоматическому выключателю постоянного тока, выполнен медными прямоугольными шинами сечением Таблица 1 – Исходные данные задачи №1
Задача №2. Определение параметров двигателя, выбор типа пускателя и параметров теплового реле. Для прямого пуска короткозамкнутого асинхронного электродвигателя серии 4А мощностью Таблица 2 – Исходные данные задачи №2
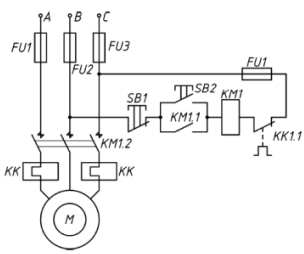 Рисунок 1 – Схема прямого пуска асинхронного электродвигателя Задача №3 Определение номинального и пограничного токов, а также сечения плавкой вставки. Для защиты от токов короткого замыкания цепи питания короткозамкнутого асинхронного электродвигателя мощностью Задача №4 Определение токов срабатывания и отпускания, а также коэффициента возврата герконового реле. Определить токи срабатывания и отпускания, а также коэффициент возврата нейтрального экранированного герконового реле, содержащего обмотку управления с числом витков W и один симметричный замыкавший магнитоуправляемый контакт, рисунок 2 (обмотка управления не показана). Исходные данные представлены в таблице 3. Таблица 3 – Исходные данные задачи №3
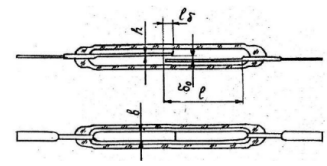 Рисунок 2 – Нейтральное экранированное герконовое реле Задача №5 Определение сопротивления и нагрузочной способности резистора, постоянной времени нагрева, коэффициента перегрузки и допустимого тока перегрузки. В пускорегулировочном реостате используется резисторы, выполненные из константановой проволоки, намотанной на фарфоровый цилиндр, имеющий желобки для укладки константановой проволоки. Диаметр цилиндров D 36мм, число желобков n, активная длина цилиндра l, масса цилиндра Gk, диаметр проволоки d . Определить сопротивление и нагрузочную способность резистора при длительном режиме работы, а также постоянную времени нагрева, 6 коэффициент перегрузки и допустимый ток перегрузки для кратковременного режима работы длительностью Таблица 4- Исходные данные задачи №5
3 Содержание работы: 3.1 Определение размеров сечения токопродводящих шин. 3.2 Определение параметров двигателя, выбор типа пускателя и параметров теплового реле. 3.3 Определение номинального и пограничного токов, а также сечения плавкой вставки. 3.4 Определение токов срабатывания и отпускания, а также коэффициента возврата герконового реле. 3.5 Определение сопротивления и нагрузочной способности резистора, постоянной времени нагрева, коэффициента перегрузки и допустимого тока перегрузки. Руководитель работы Задание принял к исполнению СОДЕРЖАНИЕ1 Определение размеров сечения токопродводящих шин 6 2 Определение параметров двигателя, выбор типа пускателя и параметров теплового реле 8 3 Определение номинального и пограничного токов, а также сечения плавкой вставки 10 4 Определение токов срабатывания и отпускания, а также коэффициента возврата герконового реле 12 5 Определение сопротивления и нагрузочной способности резистора, постоянной времени нагрева, коэффициента перегрузки и допустимого тока перегрузки 15 СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ 19 1 Определение размеров сечения токопродводящих шинРазмер сечения шин, исходя из длительного режима работы определяется по формуле: Где Определим размер сечения шин: Размеры сечения выбраны из стандартного ряда для медного проката: Электродинамическая сила, действующая на участок шинопровода длиной l, определяется по формуле: где k – коэффициент контура; Коэффициент контура определяется по формуле: Определим коэффициент контура  . .Определим электродинамическую силу: Максимальное изгибающее механическое напряжение в шине определяется по формуле: Определим максимальное изгибающее механическое напряжение в шине: Рассчитанное максимальное изгибающее механическое напряжение в шине . 2 Определение параметров двигателя, выбор типа пускателя и параметров теплового релеНоминальный ток электродвигателя определяется по формуле: где cos – коэффициент мощности двигателя; – КПД двигателя. Определим номинальный ток электродвигателя: По величине номинального тока электродвигателя выберем пускатель таким образом, чтобы максимальный рабочий ток пускателя в категории применения АС–3 (пуск электродвигателей с короткозамкнутым ротором, отключение вращающихся двигателей при номинальной нагрузке) был не менее номинального тока двигателя и максимально близким к нему: где Выбираем магнитный пускатель с типом защищенного исполнения ПМЕ222 и с встроенным тепловым реле типа ТРН-25. Для лучшего согласования перегрузочной характеристики двигателя и времятоковой характеристики теплового реле, номинальный ток уставки выбирается на 15-20% выше номинального тока двигателя: Определим номинальный ток уставки: Так как в тепловое реле выбранного выше может быть установлен тепловой элемент с различным номинальным током, то из ряда этих токов для реле пускателя выбрали значение 3 Определение номинального и пограничного токов, а также сечения плавкой вставкиДля двигателей серии 4А величина пускового тока определяется по формуле: Определим величину пускового тока: Номинальный ток плавкой вставки определяется из соотношения: В соответствии с рассчитанным значением Расчетный пограничный ток Определим расчетный пограничный ток: Диаметр плавкой вставки определяется из уравнения:  , (3.4) , (3.4)где Определим диаметр плавкой вставки: 4 Определение токов срабатывания и отпускания, а также коэффициента возврата герконового релеМагнитодвижущая сила срабатывания реле определяется уравнением:  (4.1) (4.1)где с – жесткость электродов, b – ширина электродов геркона, Определим магнитодвижущею силу срабатывания реле:  , Н. , Н.Ток срабатывания реле определяется по формуле: где W – число витков обмотки управления. Определим ток срабатывания реле: МДС отпускания реле определяется по формуле:  (4.3) (4.3)где Определим МДС отпускания реле:  ,Н. ,Н.Ток отпускания реле определяется по формуле: Определим ток отпускания реле: Коэффициент возврата реле определяется по формуле: Определим коэффициент возврата реле: 5 Определение сопротивления и нагрузочной способности резистора, постоянной времени нагрева, коэффициента перегрузки и допустимого тока перегрузкиСопротивление резистора определяется по формуле: где – температурный коэффициент сопротивления меди, T – допустимая температура нагрева константановой проволоки, Определим сопротивление резистора: Площадь поверхности проволоки определяется по формуле: Определим площадь поверхности проволоки: Нагрузочная способность резистора при длительном режиме работы оценивается допустимой величиной тока: где Площадь поверхности проволоки определяется по формуле: Определим площадь поверхности проволоки: Определим допустимую величину тока: Постоянная времени нагрева резистора при кратковременном режиме работы определяется по формуле: где Масса проволоки резистора определяется по формуле: Определим массу проволоки резистора: Наружная боковая поверхность охлаждения цилиндра определяется по формуле: Определим наружную боковую поверхность охлаждения цилиндра: Определим постоянную времени нагрева резистора при кратковременном режиме работы: Допустимый ток перегрузки резистора в кратковременном режиме работы определяется по формуле:  , (5.8) , (5.8)Допустимый ток перегрузки резистора в кратковременном режиме работы:  Допустимый ток перегрузки резистора в кратковременном режиме работы: Определим допустимый ток перегрузки резистора в кратковременном режиме работы: СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВАкимов Е. Г. Выбор и применение низковольтных электрических аппаратов распределения, управления и автоматики [Электронный ресурс]: справочное пособие / Е.Г. Акимов, Ю.С. Коробков, В.П. Соколов, Е.В. Таланов; под ред. Е.Г. Акимова и Ю.С. Коробкова. – М. : Издательский дом МЭИ, 2016. – 344 с. 2. ‒ Текст : непосредственный. Акимов Е. Г. Электрические и электронные аппараты. Электромеханические аппараты : учебник для студ. высш. учеб. заведений / [Е. Г. Акимов и др.] ; под ред. А. Г. Годжелло, Ю. К. Розанова. – М. : Издательский центр «Академия», 2010. – 352 с. 3. ‒ Текст : непосредственный. 3. Андрианов В. Н. Электрические машины и аппараты / В. Н. Андрианов // Изд. Медиа, 2012г. 4. ‒ Текст : непосредственный. 4. Девочкин О. В. Электрические аппараты: учеб. пособие для студ. учреждений сред. проф. образования / О. В. Девочкин, В. В. Лохнин, Р. В. Меркулов, Е.Н. Смолин. – М. : Издательский центр «Академия», 2010. – 240 с. ‒ Текст : непосредственный. 5. Электрические и электронные аппараты: учебно-методический комплекс / сост.: В. Л. Беляев, Ю. В. Куклев. – СПб.: Изд-во СЗТУ. 2009 – 140 с. ‒ Текст : непосредственный. |