моделирование электропривода. моделирование 11 вар. Контрольная работа по дисциплине Математическое моделирование электромеханических систем Студент группы 4ЭПб4а1 А. В. Горбунов
 Скачать 275.38 Kb. Скачать 275.38 Kb.
|

 Министерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования «Комсомольский-на-Амуре государственный университет» Факультет электротехнический Кафедра «ЭПАПУ» КОНТРОЛЬНАЯ РАБОТА по дисциплине «Математическое моделирование электромеханических систем» Студент группы 4ЭПб4а-1 А. В. Горбунов Шифр 14-1374 Преподаватель Д. В. Чернышев 2018 Содержание Задание 1…………………………………………………………………………..3 Задание 2…………………………………………………………………………..4 Список использованных источников……………………………………………6
Задание 1. Рассчитать параметры схемы модели привода постоянного тока с автоматическим управлением в функции времени (рисунок 1).  Рисунок 1 – Схема модели привода постоянного тока с автоматическим управлением в функции времени Исходя из определенных значений рассчитаем номинальный момент и токи обмоток якоря и возбуждения. 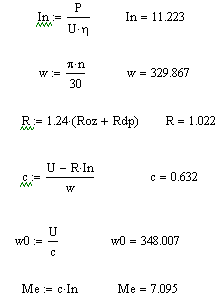  Рисунок 2 – Рабочие характеристики двигателя Задание 2 Построить переходные характеристики I(t) и ω(t). По полученным характеристикам сделать вывод. 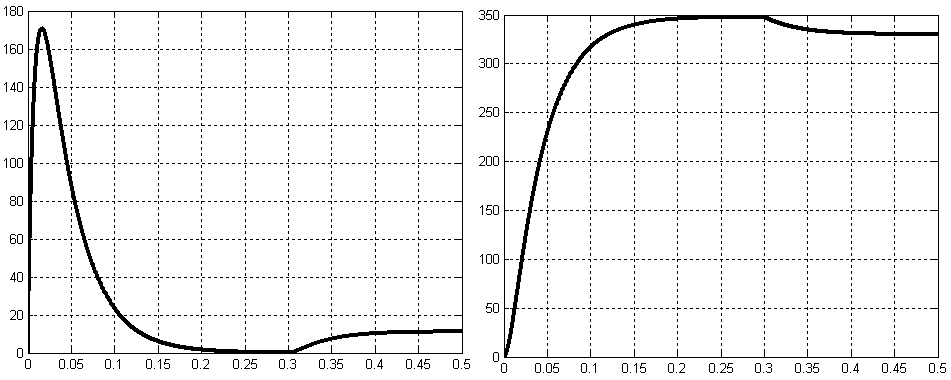 Рисунок 3 – Переходные характеристики ДПТ График характеристики работы под нагрузкой идет ниже т.к. при увеличении тока растет падение напряжения на сопротивлении и как следствие обороты становятся ниже. Список использованных источников 1 Сериков, А. В. Математическое моделирование электромеханических систем: учеб. пособие / А. В. Сериков. – Комсомольск-на-Амуре: ФГБОУ ВПО «КнАГТУ», 2013. – 146 с. 2 Черных, И.В. Simulink: среда создания инженерных приложений. – М.: ДИАЛОГ-МИФИ, 2003, 496 с. | |||||||||||||||||||||