Курс лекций по дисциплине мдк 01. 01Электрические машины и аппараты Часть 1 Поурочное планирование Тема Общая теория электрических машин Занятие 1 Общие сведения об электрических машинах и трансформаторах
 Скачать 6.3 Mb. Скачать 6.3 Mb.
|

|
Тема 3. Генераторы постоянного тока Занятие 13. Общие сведения о генераторах постоянного тока 13.1. Область применения генераторов постоянного тока. Генераторы постоянного тока используются: а) Для получения электроустановок с большой силой тока. В тех случаях, когда по условиям производства необходим большой ток (предприятия химической и металлургической промышленности, транспорт и др.), его получают, преобразуя переменный ток в постоянный с помощью преобразователей,качестве которых широко применяют установки «двигатель переменного тока – генератор постоянного тока.» б) В качестве первичных источников электрической энергии Первичными источниками энергии генераторы постоянного тока работают, главным образом, в изолированных установках: на автомашинах, самолетах, кораблях при сварке дугой, для освещения поездов, и др. для зарядки аккумуляторных батарей 13.2. Системы возбуждения генераторов постоянного тока. Для работы генератора необходимо наличие в нем магнитного поля. Создание в генераторе магнитного поля для его работы называется процессом возбуждения генератора. В зависимости от способа создания магнитного поля генераторы делят на: генераторы независимого возбуждения с электромагнитным возбуждением, с возбуждением постоянными магнитами (магнитоэлектрические) с самовозбуждением, в которых ток для обмотки возбуждения поступает от якоря генератора. При независимом возбуждении генератора обмотка возбуждения его получает питание от независимого источника постоянного тока.  Рис.13.1. Генератор с независимым возбуждением Магнитоэлектрическое возбуждение находит применение лишь в машинах очень малой мощности. При самовозбуждении возможны три варианта соединения обмотки возбуждения с обмоткой якоря: параллельное (шунтовое), последовательное (сериесное) смешанное (компаундное). В соответствии с этим различают: генераторы параллельного возбуждения,, генераторы последовательного возбуждения, генераторы смешанного возбуждения, имеющие две обмотки возбуждения: одну включенную параллельно, а другую — последовательно.  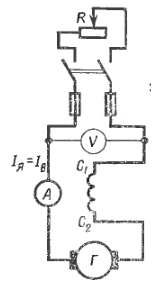 Рис.13.2. Генератор параллельного Рис.13.3. Генератор последовательного возбуждения возбуждения 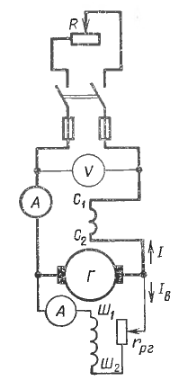 Рис.13.4. Генератор смешанного возбуждения. 13.3.Характеристики генератора постоянного тока. Свойства генераторов анализируют с помощью характеристик, устанавливающих зависимости между основными величинами, определяющими работу генератора: э.д.с. Е, напряжение на зажимах генератора U, ток возбуждения IB, ток в якоре IЯ частота вращения п. Основными характеристиками являются: нагрузочная U=f (IB) при IЯ =const. внешняя U=f (IЯ) при RВ = const; регулировочная IB =f(I) при U = const. Режим работы электрической машины при условиях, для которых она предназначена, называют номинальным режимом работы.Номинальный режим работы характеризуется величинами, обозначенными на заводском щитке машины как номинальные: напряжение, мощность, ток, частота вращения. Номинальной мощностьюгенератора постоянного тока называют полезную электрическую мощность машины, выраженную в ваттах или киловаттах. Термин «номинальный» может относиться и к величинам, не указанным на паспортном щитке машины, но характеризующим номинальный режим работы: такие, как момент, ток возбуждения, к.п.д. 13.4. Энергетический процесс и уравнение э.д.с генератора постоянного тока. В основе работы генератора лежит процесс преобразования подводимой к нему механической энергии в электрическую. Рассмотрим процесс преобразования энергии на примере генератора независимого возбуждения, приводимого во вращение с постоянной частотой (n = const). При независимом возбуждении мощность РВ, необходимая для покрытия потерь в цепи возбуждения, не входит в мощность Р1подводимую к генератору от первичного двигателя (рис. 13.5). 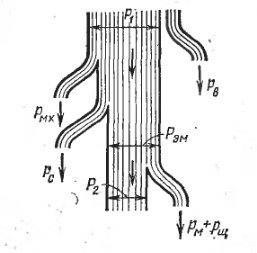 Рис.13.5. Энергетическая диаграмма генератора постоянного тока независимого возбуждения При преобразовании энергии часть мощности P1тратится на покрытие механических потерь Рмхи потерь в стали Рс , а остальная часть преобразовывается в электромагнитную мощность, которая определяется формулой: Где: РЭМ – электромагнитная мощность Р2 – полезная мощность РМ – потери в меди обмоток якоря РЩ – потери в щеточном контакте Так как: P2=UIя. РЭМ=ЕЯIЯ РМ + РЩ =IЯ2 Rя, Где: RЯ — сопротивление всех обмоток в цепи якоря и щеточного контакта, то: ЕЯIЯ =UIя+ IЯ2 Rя, После сокращения обеих частей этого равенства на Iяполучаем уравнение э.д.с. генератора: ЕЯ =U + IЯRЯ, Занятие 14 . Свойства генератора параллельного возбуждения 14.1.Схема генератора параллельного возбуждения  Рис.14.1. Генератор параллельного возбуждения Г – Якорь генератора; Ш – Шунтовая (параллельная) обмотка возбуждения; Rн – сопротивление нагрузки; I – ток нагрузки; Iя – ток якоря; Iв – ток обмотки возбуждения 14.2. Условия самовозбуждения генератора Для самовозбуждения генератора необходимо, чтобы в нем был небольшой поток остаточного намагничивания Фост (2—3% от номинального). При вращении якоря генератора в его обмотке магнитным потоком Фост наводится остаточная э.д.с. Еост = 2 – 3% от номинальной, которая создает в обмотке возбуждения небольшой ток. Этот ток при согласном направлении намагничивающего и остаточного потоков усилит магнитный поток полюсов и вызовет соответствующее увеличение э.д.с, индуктированной в обмотке якоря. Увеличение э.д.с. повлечет за собой увеличение тока возбуждения, а следовательно, и магнитного потока главных полюсов, и т. д. Самовозбуждение генератора параллельного возбуждения возможно при соблюдении следующих условий: а) магнитная система машины должна обладать остаточным магнетизмом; б) магнитным поток, создаваемый обмоткой возбуждения, должен совпадать по направлению с потоком остаточного магнетизма; в) сопротивление цепи возбуждения должно быть меньше критического Rкрит г) сопротивление нагрузки не должно быть очень малым. 14.3. Внешняя характеристика генератора с параллельным возбуждением. Эта характеристика отражает зависимость напряжения на зажимах генератора от тока нагрузки: U=f(I) при RB = const; n=const. 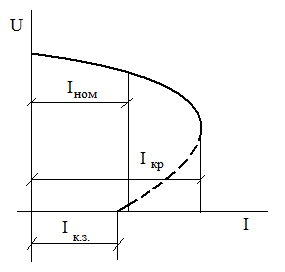 Рис.14.2.Внешняя характеристика генератора с параллельным возбуждением. У генератора параллельного возбуждения ток во внешней цепи меняется с изменением сопротивления нагрузки. Если сопротивление внешней цепи уменьшается, растет ток нагрузки. (Говорят - «увеличивается нагрузка генератора») При увеличении нагрузки напряжение на зажимах генератора под влиянием реакции якоря и падения напряжения в цепи якоря уменьшается. Снижение напряжения вызывает уменьшение тока возбуждения В свою очередь, уменьшение Iввызывает ослабление основного магнитного потока, а следовательно, уменьшение э.д.с. и напряжения на зажимах генератора. С понижением напряжения происходит дальнейшее уменьшение Iв. При этом магнитная система генератора постепенно размагничивается. В генераторе с параллельным возбуждением ток нагрузки увеличивается лишь до определенного критического значения Iкр, превышающего номинальное не более чем в 2—2,5 раза. Величина тока нагрузки зависит от двух факторов: величины напряжения генератора и сопротивления нагрузки. При увеличении тока нагрузки уменьшается напряжение на зажимах генератора (рис. 14.2.). В начале, когда магнитная система насыщена, размагничивание идет медленно и напряжение Uизменяется незначительно, вследствие чего ток в цепи якоря увеличивается. Однако при дальнейшем увеличении тока степень насыщения магнитной системы резко уменьшается, и напряжение начинает быстро падать. Преобладающим будет уже не уменьшение сопротивления цепи, а понижение напряжения. Поэтому ток, достигнув критического значения, начнет уменьшаться. При к.з Iв =0, так как U = 0.Величина Iк.з. будет определяться только величиной э.д.с. остаточной индукции: Таким образом, к.з, вызванное постепенным уменьшением сопротивления нагрузки, не опасно для генератора параллельного возбуждения. Но при внезапном коротком замыкании магнитная система генератора не успевает сразу размагнититься, и ток Iк.з. достигает опасных для машины значений. При таком резком возрастании тока па валу генератора возникает значительный тормозящий момент, а на коллекторе появляется сильное искрение, переходящее в круговой огонь. Занятие 15 . Свойства генератора последовательного возбуждения 15.1.Схема генератора последовательного возбуждения 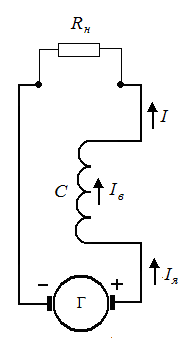 Рис.15.1. Генератор последовательного возбуждения Г – Якорь генератора; С – сериесная (последовательная) обмотка возбуждения; Rн – сопротивление нагрузки; I – ток нагрузки; Iя – ток якоря; Iв – ток обмотки возбуждения В генераторе последовательного возбуждения ток возбуждения Iв= Iя = I (рис. 15.1.), поэтому свойства этого генератора определяются лишь внешней характеристикой . 15.2. Внешняя характеристика генератора с последовательным возбуждением. Эта характеристика отражает зависимость напряжения на зажимах генератора от тока нагрузки: U=f(I) при RB = const; n=const. 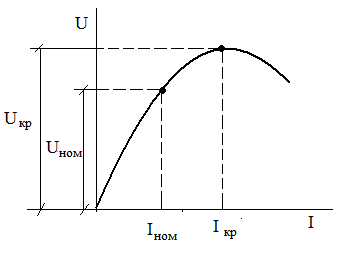 Внешняя характеристика генератора последовательного возбуждения показывает, что с увеличением тока нагрузки от нуля до номинального напряжения на зажимах генератора в начале, когда магнитная цепь еще не насыщена, растет почти прямо пропорционально току нагрузки. Затем рост напряжения постепенно уменьшается и, наконец, прекращается. Объясняется это тем, что Iя одновременно является и током возбуждения Iв, и с ростом нагрузки происходит насыщение стали. Однако одновременно с ростом тока якоря увеличивается как размагничивающее влияние реакции якоря, так и падение напряжения в сопротивлениях цепи якоря и обмотки возбуждения, вызывающее уменьшение напряжения на зажимах генератора. При большом насыщении стали магнитной цепи машины рост магнитного потока " э. д. с. практически прекращаются. В то же время падение напряжения и реакция якоря будут продолжать возрастать. При к. з. напряжение генератора будет равно нулю, а ток к. з. намного превышать номинальный ток машины. Генератор последовательного возбуждения практического применения не имеет, так как не удовлетворяет требованиям большинства потребителей в отношении постоянства напряжения. Занятие 16 . Свойства генератора смешанного возбуждения 16.1.Схема генератора смешанного возбуждения  Рис.16.1. Генератор смешанного возбуждения Г – Якорь генератора; Ш – шунтовая (параллельная) обмотка возбуждения; С – сериесная (последовательная) обмотка возбуждения; Rн – сопротивление нагрузки; I – ток нагрузки; Iя – ток якоря; Iвш – ток параллельной обмотки возбуждения Iвс – ток последовательной обмотки возбуждения Так как генератор смешанного возбуждения имеет параллельную и последовательную обмотки возбуждения (рис. 16.1), то он совмещает в себе свойства генераторов обоих типов. Поток возбуждения создается в основном параллельной обмоткой, а последовательную обмотку включают согласно с параллельной, (чтобы намагничивающие силы обмоток складывались). Свойства генератора зависят от соотношения намагничивающих сил этих обмоток. При подключении нагрузки в цепи якоря появляется ток, и возбуждение генератора осуществляется одновременно действием намагничивающих сил параллельной и последовательной обмоток. 16.2. Внешняя характеристика генератора со смешанным возбуждением. Форма внешней характеристики генератора смешанного возбуждения (рис. 16.2) зависит от соотношения витков обмоток возбуждения.  Рис.16.2. Внешняя характеристика генератора со смешанным возбуждением. При соответствующем подборе витков обмотки последовательного возбуждения ее намагничивающая сила может компенсировать падение напряжения генератора и действие реакции якоря, а напряжение на зажимах генератора при изменении нагрузки остается почти неизменным (кривая 1). Чтобы иметь возможность поддерживать постоянное напряжение на зажимах потребителя (в конце линии), нужно скомпенсировать падение напряжения в проводах линии. В этом случае усиливают последовательную обмотку возбуждения так, чтобы внешняя характеристика имела вид кривой 2. При встречном включении обмоток возбуждения напряжение генератора с ростом тока нагрузки резко уменьшается (кривая 3), что объясняется размагничивающим действием последовательной обмотки возбуждения, намагничивающая сила которой направлена встречно намагничивающей силы параллельной обмотки. Тема 4. Двигатели постоянного тока Занятие 17. Общие сведения о двигателях постоянного тока 17.1. Уравнение электродвижущей силы двигателя Двигатели постоянного тока находят широкое применение в промышленных, транспортных, крановых и других установках, где требуется широкое плавное регулирование частоты вращения. Одна и та же электрическая машина может работать как в режиме генератора, так ив режиме двигателя. Это свойство электрических машин называют обратимостью. Для двигателя, работающего с постоянной частотой вращения, можно составить уравнение э. д. с. где Еяи Iя — э.д.с и ток, соответствующие установившемуся режиму работы; IяRя — падение напряжения в сопротивлениях цепи якоря двигателя. 17.2.Уравнение моментов двигателя. Электромагнитный момент двигателя определяется формулой Где: см - коэффициент, зависящий от конструктивных особенностей машины. Электромагнитный момент создается в результате взаимодействия основного магнитного поля Ф и тока в обмотке якоряIя и расходуется на преодоление следующих тормозящих моментов: момента х.х. Mо; полезного момента М2; динамического момента Mj. Момент х.х. Мосуществует при любом режиме работы двигателя и определяется: трением в подшипниках, трением щеток о коллектор, вентиляционными потерями потерями в стали. Полезный момент М2 определяется свойствами рабочей машины и характером производственного процесса. Динамический момент Mj возникает при всяком изменении частоты вращения двигателя Зависимость между вращающим и тормозным моментами двигателя на его валу определяется законом равновесия моментов. В любых условиях работы двигателя эти моменты находятся во взаимном равновесии, т. е. равны друг другу по величине, но направлены в противоположные стороны. При n=const , изменение скорости отсутствует, поэтому момент M j = 0 и тогда М = М0+М2=Мст где: Мст— статический момент сопротивления на валу двигателя. Двигатель работает устойчиво и вращается с постоянной скоростью, если вращающий момент равен противодействующему моменту M= Мст. 17.3. Энергетическая диаграмма двигателя. Энергетическая диаграмма двигателя параллельного возбуждения, работающего в установившемся режиме, т. е. при n=const показана на рисунке 17.1. К двигателю из сети подводится мощность P1, которая покрывает потери в цепи возбуждения Рв и электрические потери в цепи якоря Ря, а оставшаяся ее часть составляет электромагнитную мощность якоря Р эм,преобразующуюся в полную механическую мощность Рм двигателя. Полезная механическая мощность на валу двигателя Р2меньше полной механической мощности Рм на величину мощности Р0, необходимой для покрытия потерь в стали Рс и механических потерь Рмех, т. е. Р2= Рм - (Рс + Рмех). 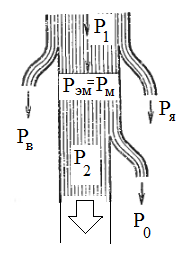 Рис.17.1. Энергетическая диаграмма двигателя параллельного возбуждения На рисунке обозначены: Р1 = Uсети∙I - мощность, подводимая к двигателю от сети. Занятие 18 . Свойства двигателя постоянного тока параллельного возбуждения. 18.1. Классификация и характеристики двигателей постоянного тока В зависимости от способа включения обмотки возбуждения и обмотки якоря различают следующие типы двигателей постоянного тока: параллельного возбуждения; последовательного возбуждения; смешанного возбуждения, в которых имеются две обмотки возбуждения: параллельная и последовательная. Двигатели постоянного тока оцениваются по совокупности следующих видов характеристик: пусковых, рабочих, регулировочных механических. 18.2. Схема двигателя параллельного возбуждения.  Рис.18.1. Схема двигателя параллельного возбуждения На схеме обозначены: ОВ1 – параллельная обмотка возбуждения R1 – регулировочный реостат в цепи обмотки возбуждения R2 – регулировочный реостат в цепи обмотки якоря 18.3. Работа двигателя параллельного возбуждения При включении двигателя постоянного тока в сеть, в момент пуска ток якоря определяется соотношением: где U - напряжение сети, Rя - сопротивление обмотки якоря, Iя -ток якоря. Затем якорь под действием крутящего момента приходит во вращение, и в обмотке якоря возбуждается ЭДС самоиндукции где с - конструктивный коэффициент, n - число оборотов, Ф - магнитный поток системы возбуждения. Полярность ЭДС самоиндукции противоположна полярности напряжения сети (противо- ЭДС), вследствие чего с ростом частоты вращения якоря значительно уменьшается ток, протекающий в цепи якоря. Следовательно, пусковой ток оказывается значительно больше номинального (в 10...30 раз), и очень часто в цепь якоря включается реостат, величина которого позволяет уменьшить пусковой ток до значений .1...1.5 Iном. Преобразуя соотношение к виду: получаем, что приложенное напряжение U уравновешивается суммой противо- ЭДС Е и падением напряжения на обмотке якоря RяIя. Крутящий момент двигателя независимого и параллельного возбуждения определяется соотношением: 18.4. Рабочие характеристики двигателя параллельного возбуждения Зависимость скорости вращения n, тока якоря Iя, вращающего момента М и коэффициента полезного действия от полезной мощности Р2 на валу двигателя при постоянном напряжении цепей якоря и возбуждения (IB=const) называется рабочими характеристиками двигателя.  Рис.18.2. Рабочие характеристики двигателя параллельного возбуждения Так как с увеличением полезной мощности вращающий момент возрастает, скорость вращения двигателя уменьшается. С увеличением вращающего момента увеличивается пропорциональный ему ток якоря. Наибольший к.п.д. достигается при нагрузках, несколько меньших номинальной. 18.4. Регулирование скорости вращения двигателя постоянного тока параллельного возбуждения. Скорость вращения двигателя определяется формулой: Полученная формула позволяет решить задачу регулирования скорости вращения двигателя. Так как сопротивление обмотки якоря имеет малую величину, то падение напряжения на активном сопротивлении якоря IяRя невелико по сравнению с напряжением сети. Поэтому в формуле членом IяRя можно пренебречь. Тогда Отсюда видно, что существует два способа плавного изменения скорости вращения двигателя в широких пределах: изменение напряжения U, подведенного к якорю двигателя; изменение магнитного потока возбуждения Ф (тока возбуждения IB). На рис.18.1. показано возможное включение регулировочных реостатов в схему двигателя. При увеличении сопротивления R2 , при постоянном напряжении сети U, уменьшается напряжение, подведенное к якорю, и следовательно, скорость вращения двигателя. С увеличением сопротивления R1 уменьшается ток возбуждения и магнитный поток возбуждения, а, следовательно, увеличивается скорость вращения двигателя. Второй способ регулирования скорости вращения двигателя предпочтительнее, так как он связан с меньшими потерями мощности: ток возбуждения в десятки раз меньше тока якоря, а потери пропорциональны квадрату тока. Однако при необходимости изменять скорость вращения двигателя в очень широких пределах одновременно используют оба способа. Возможность плавного и экономичного регулирования скорости вращения в широких пределах является важнейшим достоинством двигателей постоянного тока. Занятие 19. Свойства двигателя постоянного тока последовательного и смешанного возбуждения. 19.1. Схема двигателя последовательного возбуждения. Обмотка возбуждения двигателя включена последовательно с якорем, поэтому магнитный поток двигателя изменяется вместе с изменением нагрузки. Так как ток, потребляемый двигателем, достаточно велик, обмотка возбуждения имеет небольшое число витков. 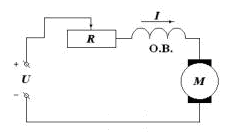 Рис.19.1. Схема двигателя последовательного возбуждения. 19.2. Работа двигателя последовательного возбуждения Из- за последовательного включения обмоток якоря и возбуждения (рис.19.1.), магнитный поток Ф пропорционален току I, и в формуле следует считать где k - постоянный коэффициент. Если принять k=1, то тогда Вращающий момент двигателя последовательного возбуждения пропорционален квадрату тока, потребляемого двигателем. Скорость вращения двигателя последовательного возбуждения определяется формулой Отсюда видно, что для двигателей последовательного возбуждения опасен режим холостого хода, т.к. при уменьшении момента на валу до нуля, скорость вращения неограниченно увеличивается, двигатель идет «вразнос». Это обстоятельство требует такого сочленения двигателя последовательного возбуждения с рабочей машиной, при котором режим холостого хода исключён. 19.3. Рабочие характеристики двигателя последовательного возбуждения Рабочие характеристики двигателя последовательного возбуждения приведены на рис.19.2. Зависимость скорости вращения n, , вращающего момента М и коэффициента полезного действия от тока якоря Iя при постоянном напряжении цепей называется рабочими характеристиками двигателя.  Рис.19.2. Рабочие характеристики двигателя последовательного возбуждения Анализ данных характеристик показывает, что при уменьшении нагрузки т.е. момента на валу двигателя и, соответственно, величины тока якоря, двигатель резко увеличивает обороты. Если ток якоря станет меньше 0,25 I ном., то обороты двигателя могут возрасти до такой величины, что не выдержат механические детали двигателя. Двигатель может разрушится. Такой процесс называют термином «Двигатель пошел в разнос» 19.4. Регулирование скорости вращения двигателя последовательного возбуждения. Скорость вращения двигателя последовательного возбуждения можно регулировать либо изменением подводимого напряжения (рис.19.3) , либо изменением магнитного потока возбуждения за счет шунтирования обмотки возбуждения (рис.19.4). Второй способ более экономичен.  Рис.19.3. Схема включения двигателя последовательного возбуждения для регулирования скорости изменением подводимого напряжения.  Рис.19.4. Схема включения двигателя последовательного возбуждения для регулирования скорости шунтированием обмотки возбуждения. Двигатель последовательного возбуждения имеет существенные преимущества, благодаря квадратичной зависимости вращающего момента от тока. Так, например, он развивает больший пусковой момент, что очень важно для электропривода на транспорте (благодаря этому, двигатель способен быстро набирать скорость после остановки). Однако резко выраженная зависимость скорости вращения от нагрузки и опасность «разноса» ограничивают область применения этих двигателей. двигатели смешанного возбуждения Указанных недостатков лишены двигатели смешанного возбуждения (рис.19.5). 19.5. Схема двигателя смешанного возбуждения.  Рис.19.5. Схема двигателя смешанного возбуждения. Характеристики этих двигателей являются промежуточными между характеристиками двигателей параллельного и последовательного возбуждения. При согласном включении последовательной и параллельной обмоток возбуждения двигатель смешанного возбуждения имеет больший пусковой момент, по сравнению с двигателем параллельного возбуждения. При встречном включении обмоток возбуждения двигатель приобретает жесткую механическую характеристику. С увеличением нагрузки магнитный поток последовательной обмотки увеличивается и, вычитаясь из потока параллельной обмотки, уменьшает общий поток возбуждения. При этом скорость вращения двигателя не только не уменьшается, а может даже увеличиваться. И в том, и в другом случае наличие магнитного потока параллельной обмотки исключает режим "разноса" двигателя при снятии нагрузки. Занятие 20. Коэффициент полезного действия машины постоянного тока 20.1. Виды потерь в машинах постоянного тока. При работе электрической машины часть потребляемой ею энергии теряется бесполезно и рассеивается в виде тепла, нагревая отдельные части машины. Потери в электрических машинах подразделяют на основные и добавочные. Основные потери возникают в результате происходящих в машине основных электромагнитных и механических процессов, а добавочные — вследствие продольной пульсации потока, обусловленной зубчатостью якоря, от неравномерного распределения в пазу основного магнитного потока и др. Независимо от режима, в котором работает машина (генератором или двигателем), основные потери подразделяются на: электрические, магнитные, (потери в стали), механические. 20.2. Электрические потери. Электрические потери в обмотке якоря: Электрические потери в обмотке возбуждения: Кроме электрических потерь в обмотке якоря и обмотках возбуждения, к электрическим потерям относятся и потери в щеточном контакте. Для двух щеток различной полярности величина потерь равна: где ∆U- переходное падение напряжения на щетках, принимаемое в соответствии с маркой щеток: для угольных и графитных 2 В, для металло-графитных 0,6 В. 20.3. Магнитные потери. Магнитные потери включают в себя потери на гистерезис и вихревые токи, вызванные перемагничиванием стали. Величина магнитных потерь зависит от магнитной индукции и частоты перемагничивания сердечника якоря f; Частота перемагничивания сердечника якоря f определяется по формуле: и не зависит от нагрузки машины. Поэтому при постоянном числе оборотов (n = const) магнитные потери можно считать постоянными. Потери от гистерезиса определяются по формуле: где σГ = 3,2- 4,4 - коэффициент, зависящий от марки стали; f— частота перемагничивания; В— наибольшее значение магнитной индукции в стали. Потери от вихревых токов определяются по формуле: где: σвих — коэффициент, зависящий от марки и толщины листов стали для слабо и среднелегированных марок стали σвих = 3,6—2,9, для высоколегированной σвих= 1,4-0,6. 20.4. Механические потери. Механические потери Рмехсостоят из: потерь в подшипниках, на трение щеток о коллектор вентиляционных потерь (потери на трение о воздух вращающихся частей машины). а) Потери в подшипниках зависят: от типа подшипников, от состояния трущихся поверхностей, вида смазки и др. Потери в подшипниках зависят от скорости вращения и не зависят от электрической нагрузки машины. Потери в подшипниках определяются по формуле: где: kтр — коэффициент трения; Fnш— давление на подшипник; vш — скорость вращения вала. б) Потери на трение щеток определяются по формуле: где: kтр — коэффициент трения; fщ - удельное давление на щетку; S щ - контактная поверхность всех щеток; vк- окружная скорость коллектора. в) Потери на вентиляцию. Потери на вентиляцию зависят от конструкции машины и рода вентиляции. В самовентилируемых машинах со встроенным вентилятором потери на вентиляцию определяются по формуле: где: k вент - коэффициент; Q- количество вентилируемого воздуха, м3/с; v— скорость на внешней окружности вентилятора, м/с. г) Общие механические потери Определяются по формуле: 20.5. Потери холостого хода (х.х.) Сумма магнитных и механических потерь составляет потери холостого хода. Они определяются по формуле: 20.6.Добавочные потери. Добавочные потери трудно учитываемые — это потери в полюсных наконечниках, возникающие при вращении якоря и обусловленные его зубчатостью, потери в стали якоря вследствие искажения основного поля реакцией якоря и др. Поэтому в машинах величину добавочных потерь принимают равной 1 % от полезной мощности для генераторов или 1 % от подводимой мощности для двигателей. 20.7. Коэффициент полезного действия Зная потери в машине, можно определить коэффициент полезного действия (к. п. д.) машины. а) Коэффициент полезного действия генератора постоянного тока. Для генераторов к. п. д. представляет собой отношение электрической полезной мощности к механической мощности на валу и определяется по формуле: Механическую мощность на валу генератора можно представить как: Электрическая полезная мощность генератора определяется по формуле: где: ∑P — сумма всех потерь в машине; U- напряжение на зажимах генератора; I - ток, отдаваемый генератором в сеть. Тогда для генератора коэффициент полезного действия можно определить по формулам: б) Коэффициент полезного действия двигателя постоянного тока. Коэффициентом полезного действия двигателя постоянного тока называется отношение механической мощности на валу двигателя Р2 к подводимой к двигателю электрической мощности Р1. В двигателях подводимая мощность Р1 определяется по формуле: где: U- напряжение на зажимах двигателя; I - ток, потребляемый двигателем. Механическую мощность на валу двигателя можно представить как: где: ∑P — сумма всех потерь в машине; Тогда для двигателя коэффициент полезного действия можно определить по формулам: Так как к. п. д. машины зависит от суммы потерь, то он - величина непостоянная, т. е. зависит от нагрузки. При х. х. машин, когда полезная мощность равна нулю, к. п. д. = 0. По мере увеличения нагрузки к. п. д. машины быстро увеличивается. Наибольшее значение он имеет при нагрузке, равной (0,8-1) Рном когда постоянные потери равны переменным. При значительных перегрузках вследствие увеличения потерь в сопротивлениях цепи якоря к. п. д. снова снижается. 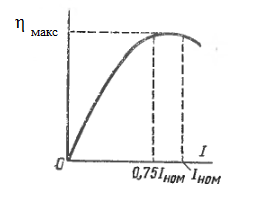 Рис.20.1. Зависимость к.п.д. машины от нагрузки Современные электрические машины имеют высокий к. п. д. Так, для машин постоянного тока: мощностью 10 кВт к. п. д. η = 0,83- 0,87; мощностью 100 кВт; η =0,884-0,93; мощностью 1000 кВт η = 0,92-0,96. Машины малой мощности имеют меньшее значение к. п. д., например для двигателя мощностью 10 Вт η = 0,34-0,4 Занятие 21. Контрольная работа ЭМ.У21 |