Курс лекций по дисциплине мдк 01. 01Электрические машины и аппараты Часть 1 Поурочное планирование Тема Общая теория электрических машин Занятие 1 Общие сведения об электрических машинах и трансформаторах
 Скачать 6.3 Mb. Скачать 6.3 Mb.
|

|
Тема 7 Асинхронные машины Занятие 36. Рабочие характеристики асинхронного двигателя 36.1. Энергетическая диаграмма асинхронного двигателя. При работе двигателя неизбежно происходит потеря преобразуемой им энергии, поэтому мощность, развиваемая на валу двигателя Р2 всегда будет меньше потребляемой им из сети мощности Р1. Процесс преобразования энергии и потери, происходящие при работе двигателя, можно иллюстрировать энергетической диаграммой (рис. 36.1). Потребляемая двигателем мощность из сети P1 частично расходуется на покрытие потерь в обмотках статора Рм1и в стали сердечника статора Рс1на гистерезис и вихревые токи. Оставшаяся часть мощности Рэм называемая электромагнитной, 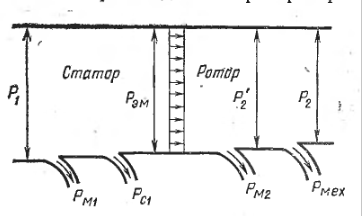 Рис.36.1. Энергетическая диаграмма асинхронного двигателя передается ротору через воздушный зазор вращающимся магнитным полем. Энергия, полученная ротором, преобразуется в механическую и частично расходуется на покрытие потерь в роторе. На диаграмме показано, что электромагнитная мощность, поступающая на ротор, может быть представлена в виде суммы двух мощностей: Рэм= Р2’+ Pм2. где Р2’— мощность, развиваемая вращающимся ротором, Pм2— потери в меди обмоток ротора. Не вся энергия, преобразованная машиной в Р2’ является полезной энергией Р2, так как часть ее расходуется на покрытие механических потерь Рмехот трения в подшипниках и о воздух вращающихся частей машины. Рассчитать потери в двигателе и полезную мощность на валу можно, используя следующие формулы: Потребляемая двигателем мощность из сети: потери в обмотках статора: электромагнитная мощность: мощность, развиваемая вращающимся ротором: Где: m = 3 – число фаз машины. 36.2. Анализ рабочих характеристик асинхронного двигателя Зависимости потребляемого тока I1, мощности P1, КПД η , коэффициента мощности cosφ , скольжения s. частоты вращения n от полезной механической мощности Р2 называются рабочими характеристиками двигателя. Эти характеристики определяются при постоянном напряжении U1 и частоте f сети. Пример рабочих характеристик приведен на рис. 36,1. Рассмотрим эти характеристики. При холостом ходе (полезная мощность Р2=0) скольжение s также равно нулю (частота вращения ротора n практически равна синхронной), ток в обмотке ротора I2=0. По обмотке статора протекает ток холостого хода I0. 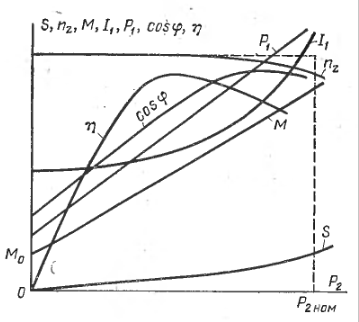 Рис.36.2. Рабочие характеристики асинхронного двигателя. Коэффициент полезного действия η равен нулю, так как равна нулю полезная мощность Р2, а коэффициент мощности равен коэффициенту мощности для тока холостого хода {cosφ1=cosφo). При увеличении нагрузки частота вращения ротора уменьшается и увеличивается скольжение s. Увеличивается ток ротора и ток статоpa. Так как увеличивается полезная мощность, растет КПД двигателя, а также коэффициент мощности. Обычно номинальная мощность на валу двигателя достигается уже при небольшом понижении частоты вращения ротора и вся область рабочих режимов находится в диапазоне скольжений от 0 до 2—5%. В асинхронном двигателе частота вращения ротора меньше частоты вращения поля, за счет чего обеспечивается наведение ЭДС, а также создание тока I2 в обмотке ротора и вращающего электромагнитного момента, под действием которого ротор приходит во вращение. Характеристика cosφ = f(P2) лежит в области значений, меньших 1, Коэффициент полезного действия достигает своего максимального значения при P2 = (0,6….0,8) P2 ном и снижается при дальнейшем росте нагрузки. 36.3. Повышение коэффициента мощности асинхронных двигателей. Основной недостаток асинхронных двигателей — низкий коэффициент мощности cosφ. Коэффициент мощности показывает, какая часть полной мощности, потребляемой двигателем преобразуется в полезную мощность. Где: Данную формулу можно преобразовать относительно Р: Анализ последней формулы показывает, что чем больше величина коэффициента мощности, тем больше полезная мощность на валу двигателя. Кроме того, анализ предыдущей формулы показывает, что увеличение коэффициента мощности при данной полной мощности можно добиться только уменьшением индуктивной мощности двигателя. Для повышения cosφ применяют следующие меры: 1. Выбирают мощность двигателя в строгом соответствии с нагрузкой, так как работа двигателя при недогрузке влечет за собой низкий cosφ двигателя. 2. Так как реактивная мощность Q в двигателе носит индуктивный характер, то для ее уменьшения и, соответственно, повышения cosφ параллельно двигателю включают статические конденсаторы, которые своей емкостью компенсируют сдвиг фаз, обусловленный двигателями с индуктивной мощностью. 3. В случаях, когда асинхронный двигатель по условиям производственного процесса длительно работает с нагрузкой меньше 50% номинальной мощности и имеет обмотку статора, допускающую переключение с треугольника на звезду, то при малых нагрузках обмотку статора двигателя, соединяемую при нормальной нагрузке треугольником, переключают в звезду. При этом фазное напряжение понижается в Занятие 37. Вращающий электромагнитный момент двигателя. Электромагнитный момент М,развиваемый асинхронным двигателем, можно определить двумя способами: через электромагнитную мощность Рэми через полную механическую мощность двигателя Р2' Через механическую мощность электромагнитный момент выражается: где: ω - механическая угловая скорость вращения ротора, 1/с; п2-частота вращения ротора, об/мин. Через электромагнитную мощность Рэм электромагнитный момент выражается: Где: р – число пар полюсов При эксплуатации электрических двигателей часто приходится определять момент по известной механической мощности Р2 (кВт) и частоте вращения n (об/мин). Тогда : из этой формулы можно определить мощность Р2 : На практике при исследовании свойств используют формулу крутящего момента, позволяющую оценить изменение крутящего момента в процессе включения и работы асинхронного двигателя.  Где: U1 – напряжение, приложенное к фазе двигателя r1 - активное сопротивление обмотки статора r2 - активное сопротивление обмотки ротора х1 - индуктивное сопротивление обмотки статора х2 - индуктивное сопротивление обмотки ротора s - скольжение двигателя Анализ данной формулы показывает, что все входящие в формулу величины ( кроме скольжения s) являются постоянными величинами. В процессе работы двигателя изменяется скольжение от s =1 при пуске до smin при холостом ходе. Напомним, что скольжением называется относительная величина, характеризующая замедление скорости вращения ротора относительно скорости вращения вращающегося поля статора. Где: n1 – скорость вращающегося магнитного поля статора. n2 – скорость вращения ротора При пуске s = 1 , при номинальном режиме работы двигателя s= 2 – 8 % . Таким образом, вращающий момент зависит от скольжения двигателя. График зависимости М = f (s) называется пусковой характеристикой двигателя.(см. Зан.38) Занятие 38. Пусковые характеристики асинхронного двигателя График зависимости М = f (s) называется пусковой характеристикой двигателя. Изменяя значение скольжения от s = 0 до s = 1 и, находя по приведенной формуле значение момента можно пусковую характеристику. Для устойчивой работы двигателя важно, чтобы автоматически устанавливалось равновесие вращающего и тормозящего моментов: с увеличением нагрузки на валу двигателя должен соответственно возрастать и вращающий момент. Это уравновешивание у работающего асинхронного двигателя осуществляется следующим образом: при увеличении нагрузки на валу тормозящий момент оказывается больше вращающего, вследствие чего скорость вращения ротора уменьшается – скольжение возрастает. Повышение скольжения вызывает увеличение вращающего момента, и равновесие моментов восстанавливается при возросшем скольжении. Однако зависимость вращающего момента от скольжения сложна. В частности, повышение скольжения вызывает увеличение вращающего момента только при изменении скольжения в определенных пределах. За этими пределами нарушенное равновесие моментов не восстанавливается – двигатель останавливается. На пусковой характеристике имеются три характерных точки, определяющих условия работы двигателя. (А,Б,В) В точкеА двигатель работает устойчиво. Если двигатель под влиянием какой-либо причины уменьшит частоту вращения, то скольжение его возрастет, вместе с ним возрастет вращающий момент. Благодаря этому частота вращения двигателя повысится, и вновь восстановится равновесие электромагнитного и противодействующего моментов Мэм = М2;. В точке Б работа двигателя не может быть устойчива: случайное отклонение частоты вращения приведет либо к остановке двигателя, либо к переходу его в точку А. Следовательно, вся восходящая ветвь характеристики является областью устойчивой работы двигателя, а вся нисходящая часть - областью неустойчивой работы. Точка Б, соответствующая максимальному моменту, разделяет области устойчивой и неустойчивой работы. Максимальному значению вращающего момента соответствует критическое скольжение Sk. Скольжению S = 1соответствует пусковой момент. Если величина противодействующего тормозного момента М2больше пускового МП, двигатель при включении не запустится, останется неподвижным. 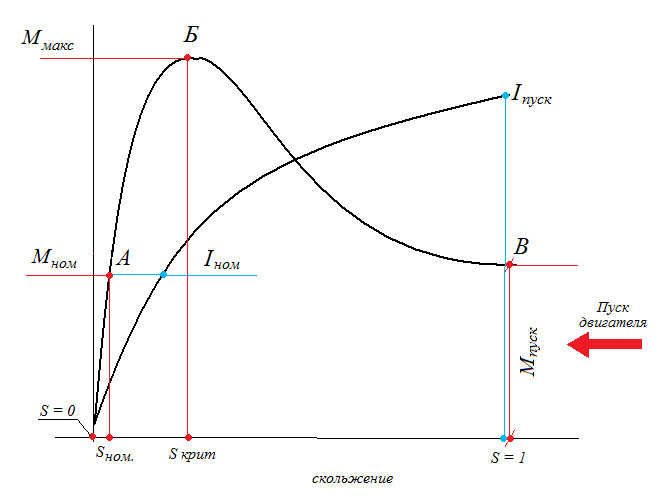 Рис.38.1. Пусковая характеристика асинхронного двигателя. Для целей электропривода большое значение имеет зависимость скорости вращения двигателя от нагрузки на валу n=F(M); эта зависимость носит назва- ние механической характеристики (рис.38.2). По форме своей она отличается от кривой M=F(s) только положением по отношению к координатным осям.  Рис. 38.2. Механическая характеристика асинхронного двигателя Занятие 39. Пусковой и максимальный момент двигателя 39.1. Моменты двигателя и потребляемый двигателем ток На пусковой характеристике обычно показывают не только кривую моментов, но и кривую тока. Рис.39.1. Пусковая характеристика асинхронного двигателя. Рассмотрим по пусковой характеристике, как изменяется ток и момент двигателя в режиме пуска и его дальнейшей работы. В начальный момент пуска ротор двигателя неподвижен (n2=0) , а в обмотке статора начинает вращаться с определенной скоростью вращающееся магнитное поле.( n1=3000) Поэтому значение скольжения при пуске будет равно: На характеристиках моментов и тока этом режим соответствует области, в которой находится точка В. На графике моментов этот режим соответствует значению пускового момента М пуск, и значению тока Iпуск. При раскрутке ротора его скорость становится больше нуля и, в соответствии с приведенной формулой значение скольжения уменьшается. На графике область работы двигателя сдвигается влево. При этом растет момент двигателя и уменьшается ток в обмотках, который в момент пуска имел наибольшее значение. Момент двигателя увеличивается до своего наибольшего значения в точке Б характеристики. Эта точка на графике моментов характеризует наибольший момент двигателя М макс. Скольжение , соответствующее максимальному моменту двигателя называется критическим Sкрит.. Область работы двигателя от S=1 до Sкрит является неустойчивой работой двигателя. Достаточно в этой области повысить нагрузку на валу двигателя, как скольжение двигателя повышается, и двигатель может остановиться. Поэтому асинхронный двигатель никогда не работает в области максимального момента. Рабочей областью для двигателя является область со значениями скольжения лежащими в пределах s = 0,02 …0,08; (2…8%) . Этот режим работы двигателя называется номинальным режимом. Соответственно параметры двигателя при этом режиме также называются номинальными. S ном; М ном; Iном. 39.2. Перегрузочная способность, кратности моментов и токов двигателя. При анализе параметров двигателя обычно сравнивают значения параметров в пусковом и максимальном режимах с номинальным режимом. При этом используют не абсолютные значения моментов и токов, а относительные. т.е. отнесенные к номинальному режиму. Относительный максимальный момент двигателя определяет его перегрузочную способность, т. е. способность двигателя кратковременно выдерживать нагрузки, большие номинальной. В электрических машинах перегрузочная способность обозначает kм и определяется по формуле: В серийных асинхронных двигателях перегрузочная способность ( кратность максимального момента) лежит в пределах Перегрузочная способность не имеет размерности и показывает во сколько раз по сравнению с номинальным моментом можно кратковременно повысить момент двигателя без ущерба для его работы. Относительное значение пускового момента kп (кратность пускового момента) определяет способность двигатели разгоняться до рабочей частоты вращения с полной нагрузкой на валу и определяется по формуле: В серийных асинхронных двигателях кратность пускового момента лежит в пределах Относительное значение пускового тока kТ (кратность пускового тока) определяет способность двигатели кратковременно выдерживать большие значения пускового тока и определяется по формуле: В серийных асинхронных двигателях кратность пускового тока лежит в пределах Из данной формулы можно сделать вывод, двигатель способен выдерживать ток в 7 раз больший, чем номинальный. Однако такое значение двигатель может выдержать кратковременно (несколько секунд). Если двигатель работает нормально, то этого времени достаточно, чтобы двигатель набрал обороты и значение тока уменьшились ( см. пусковые характеристики). Если на валу двигателя большая механическая нагрузка, сам ротор очень тяжел, подшипники не прокручиваются или какие-либо другие неисправности, которые не позволяют быстро раскрутиться ротору двигателя, то большой пусковой ток будет протекать по обмоткам длительное время. Это приводит к перегреву обмоток, разрушению их изоляции и выходу двигателя из строя. Для запуска тяжелых двигателей существуют специальные методы ограничения пускового тока (см. Занятие 40) Занятие 40. Пуск в ход асинхронных двигателей 40.1. Общие определения. Все асинхронные двигатели должны самостоятельно пускаться в ход, т. е. разгоняться от неподвижного состояния (n = 0, s = 1) до номинальной частоты вращения (n = nном, s = s ном) преодолевая при этом момент сопротивления нагрузки. Разгон двигателя должен происходить достаточно быстро, чтобы потери, выделяемые в нем при пуске, не приводили к недопустимо большому перегреву обмоток (в зоне скольжения от s = 1 до Sкрпо обмоткам двигателя проходят токи, существенно большие номинального). Кроме статического противодействующего момента, существует и динамический момент. который возникает вследствие инерционности приводимого двигателем механизма. Пуск проводится успешно, если электромагнитный момент двигателя превышает сумму статического и динамического моментов сопротивления нагрузки во время разгона, а время пуска тем меньше, чем больше разность между электромагнитным моментом двигателя Ми моментом сопротивления Мс. Таким образом, чем больший момент развивает двигатель при пуске, тем меньше время пуска, выделяемая во время пуска энергия потерь в обмотках и соответственно перегрев обмоток. Если момент сопротивления (нагрузки) больше момента, развиваемого двигателем, то пуск вообще оказывается невозможным. 40.2. Пуск в ход асинхронного двигателя с короткозамкнутым ротором Для пуска асинхронного двигателя с короткозамкнутым ротором применяются следующие способы: прямой включение, пуск при пониженном напряжении питания. 40.2.1. Прямое включение Прямое включениеасинхронного двигателя в сеть является наиболее простым способом пуска двигателя. В то же время в этом случае обмотки статора и ротора двигателя обтекаются большим пусковым током (током КЗ), равным 4—7-кратному значению номинального. Поэтому очень важно, чтобы время пуска двигателя было при этом как можно меньшим. Такой метод пуска применяется для небольших двигателей, или для двигателей, приводящих во вращение небольшие механические нагрузки. 40.2.2. Пуск при пониженном, напряжении Пуск при пониженном напряжении питания осуществляется обычно в тех случаях, когда прямой пуск не допускается по условиям работы сети. Обычно применяют один из четырех способов пуска при пониженном напряжении: двигателя через понижающий автотрансформатор; переключение обмотки статора со звезды на треугольник; включение двигателя через полупроводниковый регулятор напряжения. Во всех этих случаях снижение напряжения ведет не только к пропорциональному уменьшению пускового тока (положительный эффект), но и к резкому (квадратичному) уменьшению пускового момента (отрицательный эффект). а) Пуск асинхронного двигателя через автотрасформатор На рис.40.1. показана схема пуска асинхронного двигателя через автотрансформатор. 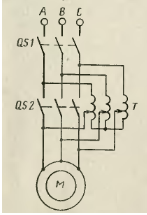 Рис.40.1. Пуск асинхронного двигателя с помощью автотрансформатора Уменьшения напряжения при пуске можно достигать включением между сетью и двигателем понижающего автотрансформатора Т (рис. 40.1). При пуске сначала замыкают рубильник QS1, и пониженное напряжение попадает на обмотки двигателя. По достижении ротором достаточной частоты вращения замыкают рубильник OS2, шунтируя автотрансформатор так, что полное напряжение сети попадает на обмотки двигателя. б) Пуск с переключением обмоток статора со звезды на треугольник К способам пуска с понижением напряжения можно отнести также пуск с переключением обмоток статора со звезды на треугольник (рис. 40.2). 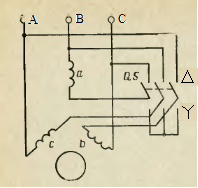 Рис.40.2. Схема пуска двигателя с переключением обмоток со звезды на треугольник В режиме пуска переключатель QSнаходится в положении , причем обмотка статора включена по схеме звезды. После того как ротор достигнет установившейся частоты вращения, переключатель необходимо перевести в положение При данном способе пуска фактически снижается напряжение, подводимое к каждой фазе двигателя, поскольку при одинаковом напряжении сети фазное напряжение в схеме звезды в 40.3. Пуск в ход асинхронного двигателя с фазным ротором Так как фазный ротор содержит медную обмотку, начала которой замкнуты на контактные кольца, то через скользящий контакт ( кольцо – щетка) можно вводить в цепь ротора добавочное сопротивление (пусковые реостаты). Этот способ применяют при тяжелых условия пуска, т.е. при большой нагрузке на валу. Для реостатного пуска используют асинхронные двигатели с фазным ротором, в цепь ротора включается пусковой реостат. Реостатный пуск служит для увеличения пускового момента. Одновременно происходит уменьшение пускового тока двигателя. По мере разгона двигателя пусковой реостат выводится и после окончания пуска обмотка ротора оказывается замкнутой накоротко. 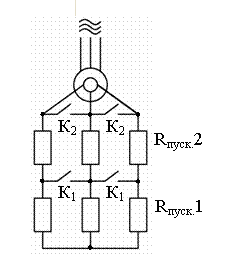 Рис. 40.3 Включение пусковых реостатов со ступенчатым регулированием. В момент пуска в ход в цепь ротора введен полностью пусковой реостат (Rпуск3 = Rпуск1 + Rпуск2), для чего контакты реле К1 и К2 разомкнуты. При заданной нагрузке на валу и введенном реостате Rпуск3 пусковой ток уменьшается. Для дальнейшего разгона двигателя нужно замкнуть контакты К1, при этом сопротивление пускового реостата снизится до Rпуск2 и разгон будет продолжаться с уменьшенным пусковым током. При замыкании контактов К2, пусковой реостат будет полностью выведен (Rпуск=0) и окончательный разгон двигателя будет продолжаться по его естественной механической характеристике с естественным пусковым током. Вместо ступенчатого регулирования пускового тока можно применять плавное регулирование. При этом способе реостаты оборудуются скользящими контактами. 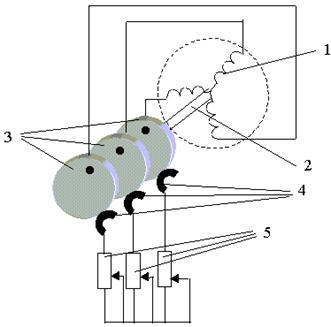 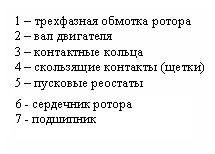 Рис.40.3. Схема включения пусковых реостатов с плавным регулированием пускового тока Занятие 41. Регулирование частоты вращения асинхронных двигателей 41.1. Общие положения. Регулирование частоты вращения двигателей определяется в соответствии с требованиями технологических процессов и тех производственных механизмов, в которых они используются. Регулирование частоты вращения двигателей характеризуется следующими основными показателями. Диапазон регулирования Плавность регулирования, Направление возможного изменения частоты вращения двигателя (зона регулирования). Экономичность регулирования Допустимая нагрузка двигателя 1. Диапазон регулированияD (предел изменения частоты вращения). Под этой величиной понимается отношение максимальной частоты вращения двигателя nmax к его минимальной частоте вращении nmin 41.1.2.Плавность регулирования, характеризуется минимальным скачком частоты вращения двигателя при переходе с одной механической характеристики на другую. 41.1.3.Направление возможного изменения частоты вращения двигателя (зона регулирования). При номинальных условиях работы (напряжении и частоте питающей сети) двигатель имеет определенную механическую характеристику, то есть зависимость момента двигателя от числа оборотов вала двигателя. При регулировании частоты вращения соответствующие им характеристики будут отличаться от первоначальной. Эти характеристики носят название искусственных (регулировочных) характеристик. С помощью одних методов регулирования удается получить, например, только увеличение числа оборотов при сохранении заданного момента. Другие методы обеспечивают регулирование частоты вращения как выше, так и ниже естественной характеристики. 41.1.4.Экономичность регулирования Определяется по дополнительным капитальным затратам, необходимым при создании регулировочных устройств, а также по потерям электроэнергии при регулировании. При этом более рационально применение простых и дешевых способов регулирования частоты вращения двигателей, даже и неэкономичных с точки зрения потребления энергии. 41.1.5.Допустимая нагрузка двигателя при изменения частоты вращения . Диапазон изменения скорости вращения вала двигателя может быть ограничен величиной токов в статорной и роторных цепях. Эта нагрузка определяется допустимым нагревом двигателя и механическими характеристиками производственных механизмов, моментом сопротивления на валу, моментом инерции двигатели и механизма и т. д. 41.2. Методы регулирования частоты вращения асинхронных двигателей В соответствии с приведенными ранее формулами можно записать, что частота вращения ротора n, об/мин, равна: где f1 — частота питающей сети, Гц; р — число пар полюсов двигателя; s — скольжение, отн. ед. Из формулы следует, что существуют три основных способа регулирования частоты вращения: изменением частоты f1 питающего двигатель напряжения; изменением числа пар полюсов р; изменением скольжения s. Все три способа нашли широкое применение на практике. 41.3. Регулирование частоты вращения изменением частоты питающей сети Регулирование частоты вращения изменением частоты питающей сети является наиболее экономичным способом регулирования и позволяет получить хорошие механические характеристики электропривода. При изменении частоты питающей сети обеспечивается изменение частоты вращения магнитного поля асинхронного двигателя, что следует из формулы Источник питания двигателя должен осуществлять преобразование напряжения стандартной частоты сети fном = 50 Гц в напряжение с требуемой частотой. Одновременно с изменением частоты должна регулироваться по определенному закону и величина подводимого к двигателю напряжения, чтобы обеспечим, высокую жесткость механической характеристики и требуемую перегрузочную способность двигателя. В качестве источника питании могут применяться электромашинные вращающиеся преобразователи, использующие электрические машины, или статические преобразователи частоты на полупроводниковых приборах, которые серийно выпускает промышленность. Положительным свойством частотною регулирования является возможность плавного регулирования в широком диапазоне в обе стороны от естественной характеристики (в том числе возможно вращение двигатели с частотой, большей номинальной). При регулировании обеспечивается жесткость характеристик и высокая перегрузочная способность. Недостатками данного способа регулирования можно считать большую сложность преобразовательного устройства и сравнительно высокую стоимость оборудования. Однако в ряде случаев в приводах металлообрабатывающих станков, электрошпинделей, мощных воздуходувок и других механизмов частотное регулирование является наиболее приемлемым. 41.4.Регулирование частоты вращения изменением числа полюсов Регулирование частоты вращения изменением числа полюсов в обмотке статора обеспечивается благодаря изменению частоты вращения магнитного поля статора. При неизменной частоте питающей сети частота вращении магнитного поля и определяемая ею частота вращения ротора изменяются обратно пропорционально числу полюсов. Так как число полюсов, фиксированное ступенями, может быть равно 2, 4, 6, 8, 10 и т. д., что при частоте питающей сети, равной 50 Гц, соответствует синхронной частоте вращения 3000, 1500, 1000, 750, 600 об/мин и т. д., то указанным способом может быть обеспечено только ступенчатое регулирование. Изменение числа пар полюсов обычно достигается следующими способами: На статоре двигателя укладываются две электрически не связанные между собой обмотки, имеющие разное число пар полюсов, например р1и р2. При подключении одной из обмоток к сети переменного тока, например, с числом полюсов р1двигатель будет иметь синхронную частоту вращения, соответствующую данному числу полюсов . Другая обмотка при этом обесточена. При необходимости получения другой частоты вращения п2обмотка с числом полюсов р1отключается и включается с числом полюсов p2. Такие асинхронные двигатели получили название двухобмоточных. 2. На статоре укладывается одна обмотка, допускающая переключение на разное число полюсов. К положительным показателям многоскоростных асинхронных двигателей следует отнести экономичность и относительно большой диапазон регулирования частоты вращения ротора. Недостатком данного способа регулирования является невозможность плавного изменения частоты вращения. В рамках единой общепромышленной серии асинхронных двигателей 4А выпускается модификация многоскоростиых двигателей, предназначенных для работы на двух, трех или четырех скоростях. Однооб моточные двигатели выпускаются на следующие соотношения частот вращения: 1500/3000, 750/1500, 1000/1500. 750/1000, 500/1000 об/мин. Двухобмоточные (трехскоростные) имеют соотношения 1000/1500/3000, 750/1500/3000, 750/1000/1500 об/мин. двухобмоточные (четырехскоростные)—750/1000/1500/3000. 500/750/1000/1500 об/мин 41.5. Регулирование частоты вращения изменением скольжения Регулирование частоты вращения изменением скольжения является одним из простых способов регулирования. В то же время при изменении (увеличении) скольжения изменяются (увеличиваются) потери в обмотке ротора, что приводит к уменьшению КПД при регулировании. Как правило при регулировании скольжения используют фазный ротор с выведенными на контактные кольца обмоткой. При регулировании со стороны ротора в основном применяется реостатное регулирование частоты вращения путем введения в цепь обмотки ротора добавочных активных сопротивлений (резисторов). Занятие 42 . Однофазные асинхронные двигатели 42.1. Общие определения В различных бытовых и промышленных приборах широкое распространение получили однофазные асинхронные двигатели малой мощности. Однофазные асинхронные двигатели имеют на статоре рабочую обмотку, подключаемую к однофазной сети переменного тока, и вспомогательную (пусковую), которая чаще всего соединяется с однофазной сетью переменного тока кратковременно только в период пуска двигателя. Роторная обмотки, как правило, выполняется короткозамкнутой в виде беличьей клетки. (В качестве однофазного асинхронного двигателя может быть использован трехфазный двигатель с отсоединенной одной из фаз статора. Мощность, развиваемая таким электродвигателем при однофазном включении, составляет 50—60% номинальной мощности двигателя при трехфазной схеме включения.) Особенность однофазных асинхронных двигателей — отсутствие начального или пускового момента, т. е. при включении такого двигателя в сеть ротор его остается неподвижным. Если же под действием какой-либо внешней силы вывести ротор из состояния покоя, то двигатель будет развивать вращающий момент. 42.2. Пуск однофазных асинхронных двигателей Отсутствие начального момента - существенный недостаток однофазных асинхронных двигателей. Поэтому эти двигатели всегдаснабжают пусковым устройством. Наиболее простое пусковое устройство — две обмотки, помещенные на статоре и сдвинутые друг относительно друга на половину полюсного деления (90 эл. град.). Однофазный двигатель пускают включением двух катушек в одну общую однофазную сеть. Для получения угла сдвига фаз между токами в катушках, примерно равного ±π/2, одну из катушек (рабочую) включают в сеть непосредственно, а вторую катушку (пусковую) - через индуктивную катушку (рис.42.1.) или конденсатор (рис. 42.2.). Пусковая обмотка включается, только на период пуска. В момент, когда ротор приобретает определенную частоту вращения, пусковая обмотка отключается от сети и двигатель работает как однофазный. Отключается пусковая обмотка центробежным выключателем или специальным реле  Рис. 42.1. Схема включения пусковой обмотки однофазного двигателя через индуктивную катушку 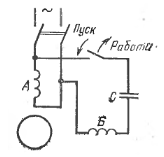 Рис. 42.2. Схема включения пусковой обмотки однофазного двигателя через конденсатор  Рис. 42.3. Схема включения трехфазного доигателя {а) в однофазную сеть с пусковым активным (б), индуктивным (в) и емкостным (г) сопротивлениями . В качестве однофазного двигателя может быть использован любой трехфазный асинхронный двигатель (рис. 42.3,а), тогда его рабочая или главная обмотка, состоящая из двух последовательно соединенных фаз трехфазного двигателя, включается непосредственно в однофазную сеть, третья фаза, являющаяся пусковой или вспомогательной обмоткой, включается в ту же сеть через пусковой элемент — сопротивление (рис. 42.3,б), индуктивность (рис. 42.3, в) или конденсатор (рис. 42.3,г). Занятие 43. Контрольная работа ЭМ.У43 |