студент. Ргз Куделько (1). Курсовая работа проектирование пневмопривода заполняющего устройства. Цилиндр B
 Скачать 0.92 Mb. Скачать 0.92 Mb.
|

|
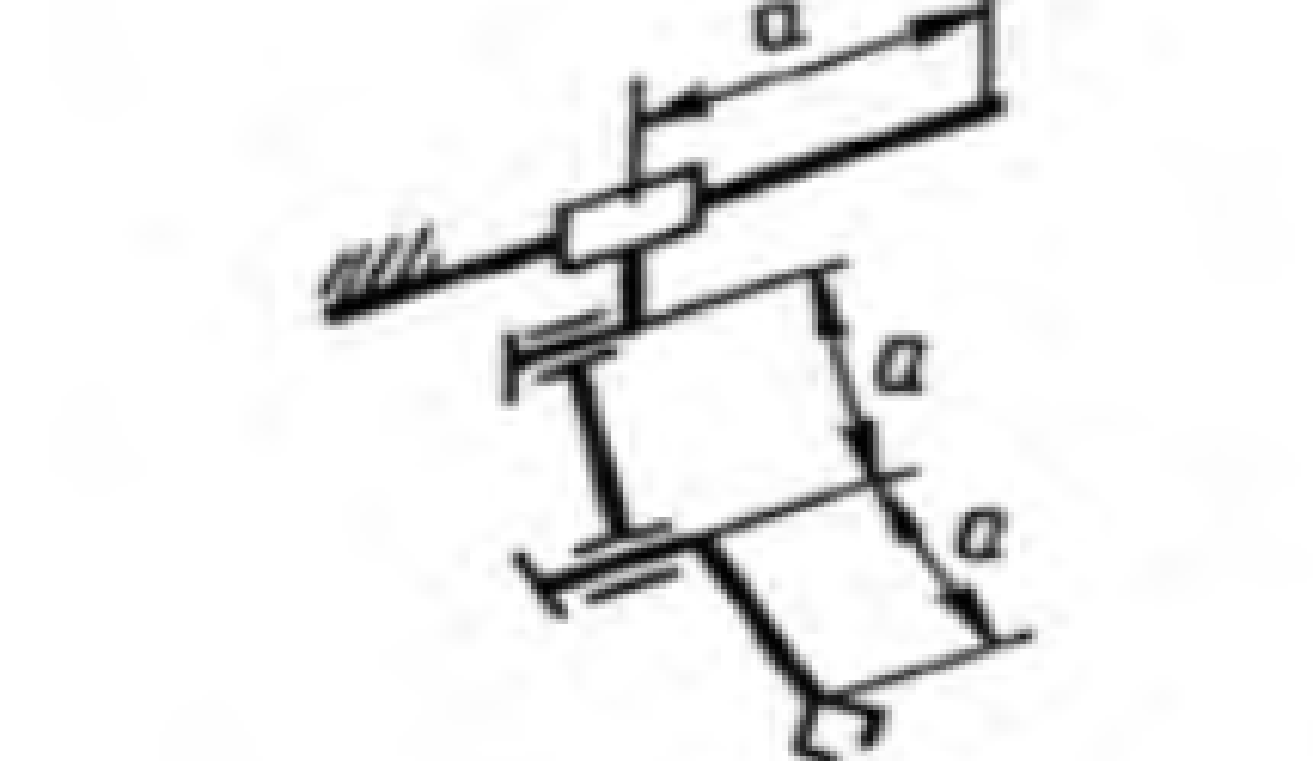
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ Федеральное государственное бюджетное образовательное учреждение высшего образования «Сибирский государственный университет науки и технологий имени академика М.Ф. Решетнева» Институт машиноведения и мехатроники Кафедра ТМС КУРСОВАЯ РАБОТА Проектирование пневмопривода заполняющего устройства. Цилиндр B Преподаватель ___________ Будьков В.А подпись. дата Обучающийся БМЕ18-01 18741099 ___________ Куделько В.Е. подпись дата Красноярск 2021 Заданный манипулятор:
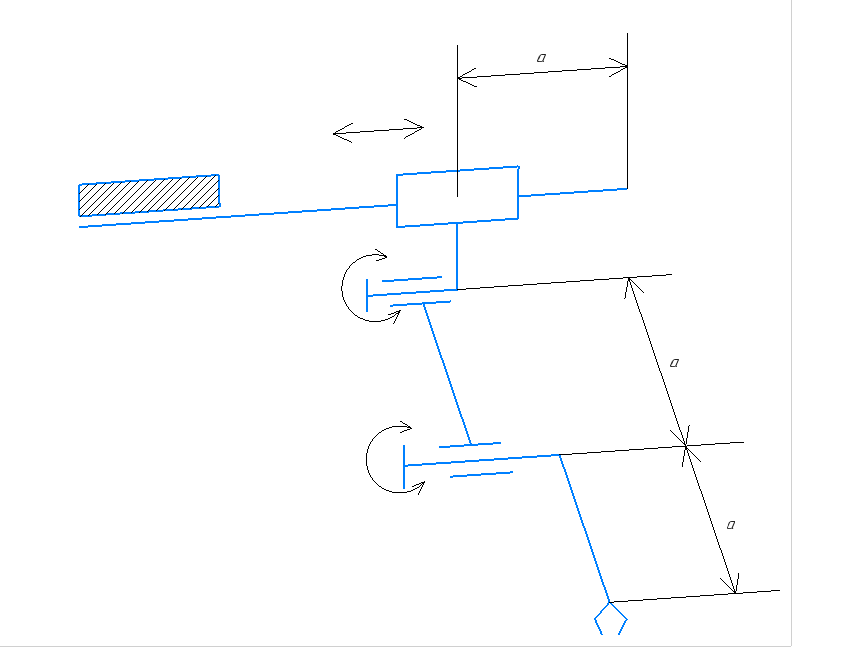
Определить число степеней свободы Манипулятор состоит из 2 пар 5-го класса и 1 пары 4 класса со стойки, тогда:  На основании структурной кинематической схемы разработать компоновку манипулятора 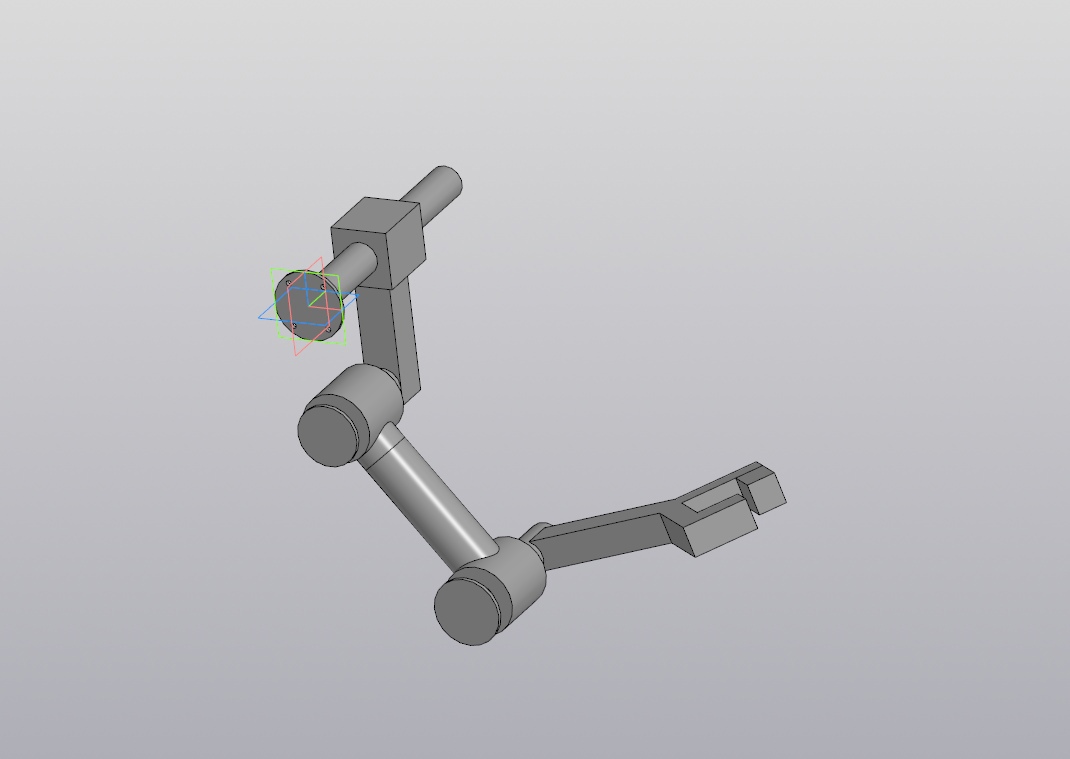 Рисунок 3 ー компоновка манипулятора Произвести разметку систем координат, связанных со звеньями, указать их на схеме 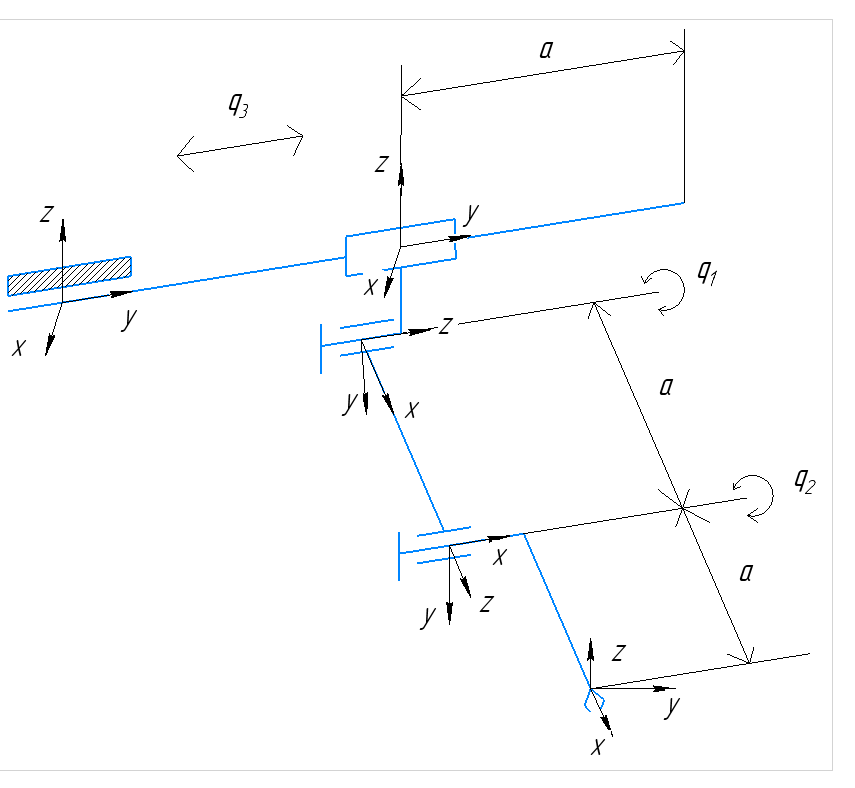 Рисунок 4 ー разметка систем координат Вычислить необходимые матрицы перехода     Определить координаты центра схвата и направляющие косинусы осей схвата в инерциальной системе координат 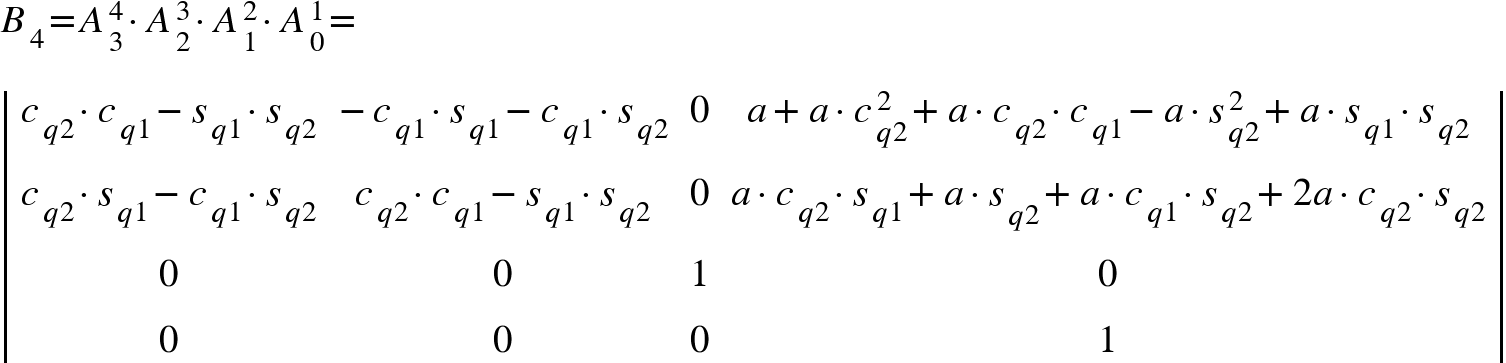 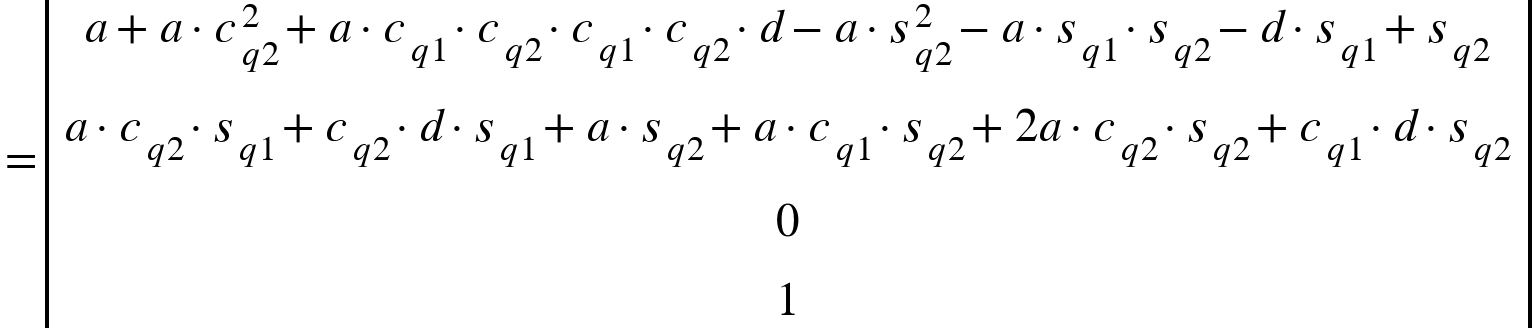 где центр схвата в инерциальной системе координат: 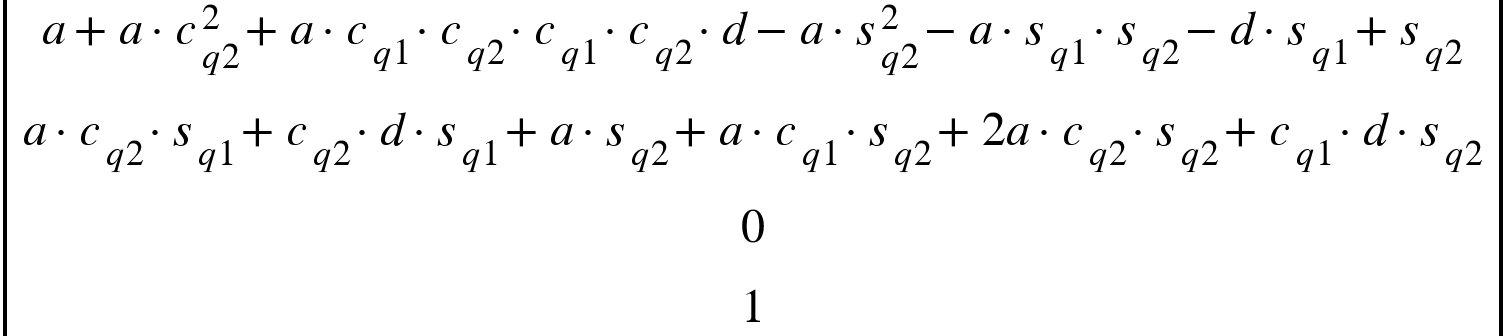 где направляющие косинусы осей схвата в инерциальной системе координат: 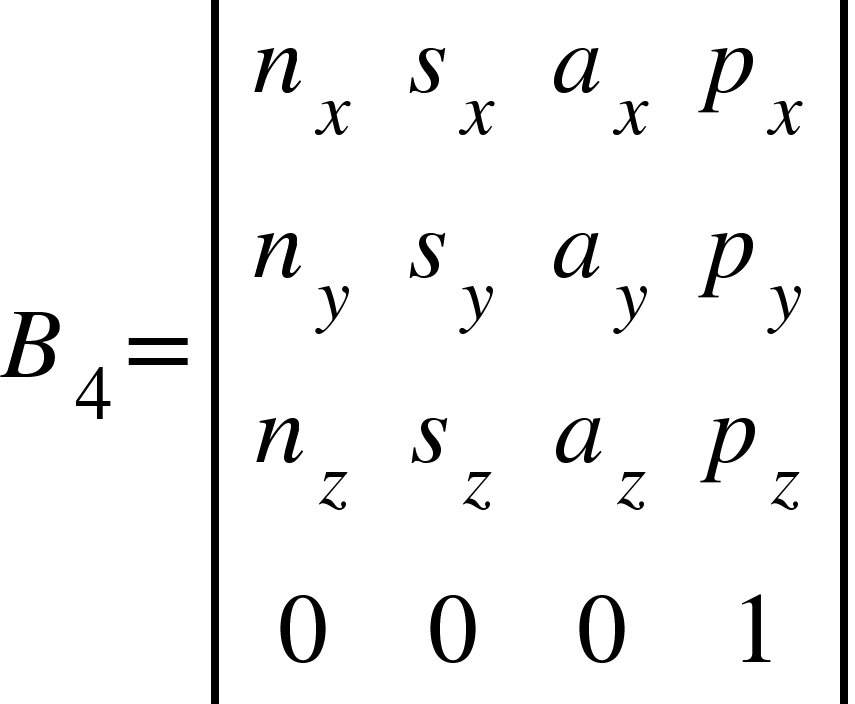 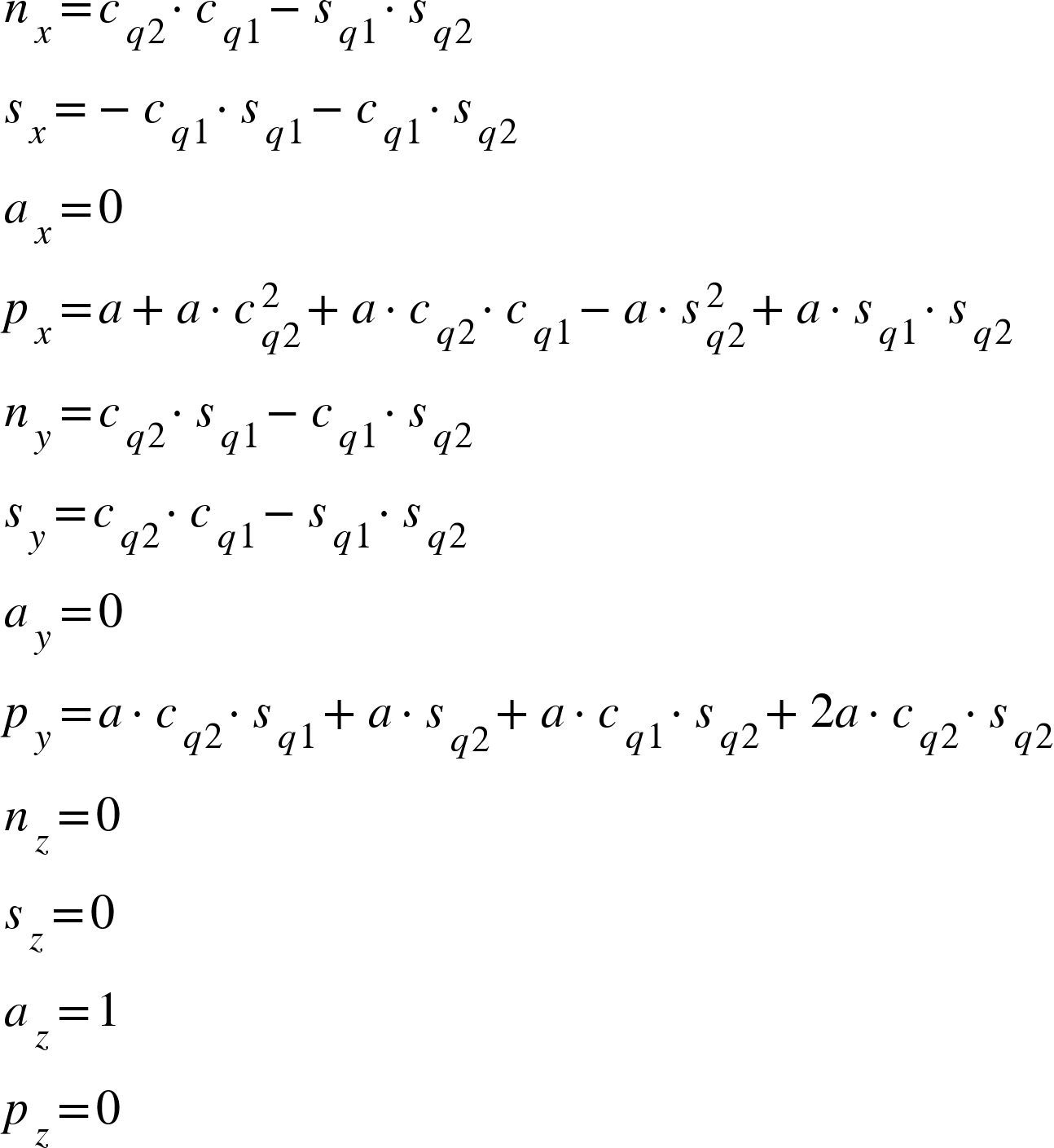 Итоговый расчет матриц в программе LabView Перемещение : a = 0.5 м.   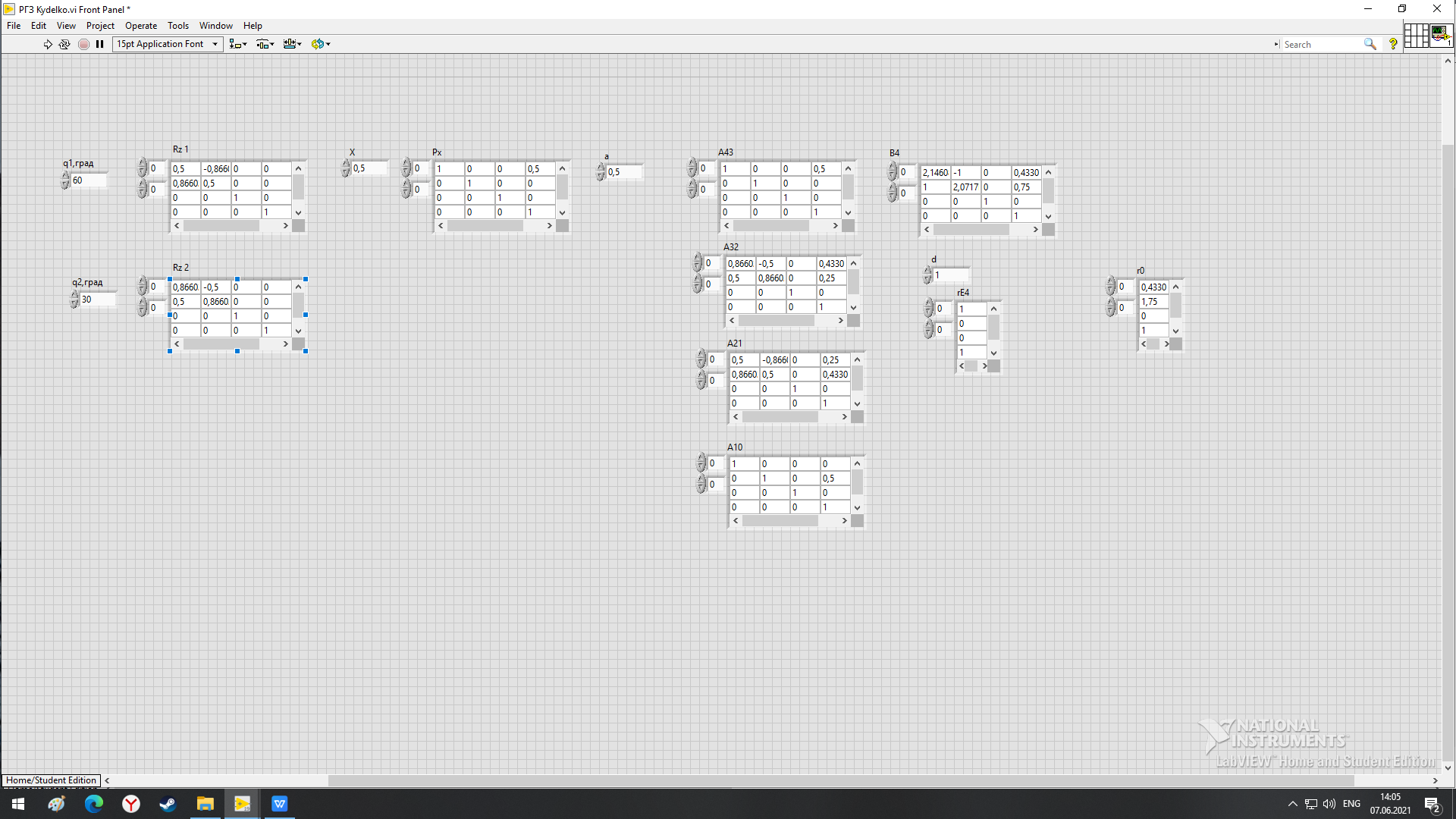 Рисунок 5 -Нахождение координат. Вывод: решили прямую задачу кинематики для манипулятора, выполненного по заданной кинематической схеме. Определили число степеней подвижности манипулятора, на основании структурной кинематической схемы разработали компоновку манипулятора, произвели разметку систем координат, связанных со звеньями, вычислили необходимые матрицы переходов, определили координаты центра схвата и направляющие косинусы осей схвата в инерциальной системе координат. |