Лаба 6. Лабораторная работа 6 Моделирование управляемого выпрямителя с зоннофазным регулированием напряжения
 Скачать 0.7 Mb. Скачать 0.7 Mb.
|

|
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА Федеральное государственное бюджетное образовательное учреждение высшего образования «Иркутский государственный университет путей сообщения» (ФГБОУ ВО ИрГУПС) Факультет «Транспортных систем» Кафедра «Электроподвижной состав» Дисциплина «Моделирование электромеханических цепей методом MATLAB» Лабораторная работа №6 Моделирование управляемого выпрямителя с зонно-фазным регулированием напряжения
Иркутск 2018 Моделирование управляемого выпрямителя с зонно-фазным регулированием напряжения Цель работы: - произвести расчёт математической модели управляемого тиристорного выпрямителя с зонно-фазным регулированием выпрямленного напряжения. Теоретическое описание объекта моделирования Управляемые выпрямители с зонно-фазным регулированием напряжения являются основными силовыми преобразователями на таких отечественных электровозах, как ВЛ80Р, ВЛ85, ЭП1в/и, 2ЭС5К и т. д. В работе необходимо смоделировать упрощённую силовую схему электровоза, содержащую источник высокого напряжения ИВН (25 кВ), тяговый трансформатор ТТ, выпрямитель ВИП, RL-цепь, имитирующую цепь тяговых двигателей ТЭД и систему управления СУ, генерирующую импульсы управления для тиристоров выпрямителя.  Рисунок 1 – Принципиальная схема электровоза Напряжение с источника ИВН поступает на первичную обмотку тягового трансформатора ТТ, который понижает его до необходимого уровня. Ко вторичной обмотке тягового трансформатора ТТ подключён ВИП, к выходу которого подключена цепь тяговых двигателей ТЭД. Система управления СУ с помощью датчика напряжения ДН следит за фазой напряжения в сети и в соответствии с ним выдаёт импульсы управления α0, αр, которые открывают тиристоры. В результате открытия тиристоров, на двигатели подаётся выпрямленное пульсирующее напряжение.  Рисунок 2 – Форма напряжения на выходе выпрямителя при зонно-фазном регулировании напряжения На рисунке 2 приняты следующие обозначения: α0, αр – углы регулирования; γ0, γр – углы коммутации; UIm, UIIm – соответственно амплитудное значение напряжения первой и второй секции вторичной обмотки тягового трансформатора.  Рисунок 3 - Диаграммы, поясняющие принцип формирования импульсов управления Импульсы управления формируются следующим образом. Сигнал о напряжении сети uс поступает на вход системы управления. В системе управления СУ формируется пилообразный сигнал uгпн, фаза которого совпадает с фазой питающего напряжения uс. Сигнал сравнивается с сигналом управления uупр. Когда сигнал uгпн становится больше сигнала uупр, логическими элементами формируется сигнал ua, являющийся углом регулирования для тиристоров. Далее этот сигнал надо распределить по диагональным группам тиристоров в соответствии с фазой питающего напряжения. Это осуществляется благодаря сигналам uопв1 и uопв2. На первую группу тиристоров импульсы попадают в первый полупериод питающего напряжения (сигнал uа1), а на вторую группу – во второй полупериод (сигнал uа2). Индивидуальное задание 1. Создать модель упрощенной силовой схемы электровоза  Рисунок 4 - Упрощённая модель электровоза с зонно-фазным регулированием напряжения Внешний вид подсистем ВИП представлен на рисунке 5.  Рисунок 5 – Внешний вид подсистемы ВИП  Рисунок 6 – Внешний вид подсистемы БУВИП Представленная модель работает следующим образом. Первичная обмотка тягового трансформатора (Linear Transformer) питается от источника с амплитудным напряжением 35250 В, а к двум секциям вторичной обмотки подключен тиристорный мост (ВИП). К выходу тиристорного моста подключена активно-индуктивная нагрузка (Series RLC Branch), имитирующая тяговые двигатели. Тиристорный мост управляется с помощью системы управления (БУВИП), которая работает следующим образом. Датчик напряжения в основной модели формирует сигнал, равный напряжению источника питания. Этот сигнал поступает на второй вход системы управления (In2) и далее на индикатор пересечения и на определитель знака входного сигнала. С выхода индикатора пересечения сигнал поступает на сбрасывающий вход интегратора. На интегрирующий вход интегратора поступает постоянный сигнал, соответственно на выходе интегратора сигнал будет увеличиваться с постоянной скоростью. Сигналы с индикатора пересечения необходимы для обнуления выходного сигнала интегратора. Поскольку индикатор пересечения выдаёт сигнал каждые 0,01 с (полупериод синусоиды 50 Гц), то на выходе интегратора формируется пилообразный сигнал с шагом 0,01 с и амплитудой, равной «1». Этот пилообразный сигнал поступает на два сумматора. Первый сумматор (Sum Alpha_p) служит для определения угла регулирования αр, а второй сумматор (Sum Alpha_0) – для угла регулирования α0. В первом сумматоре происходит вычитание сигнала, полученного из внешнего входа In1, из пилообразного сигнала. Например, если входной сигнал равен 0,5, то на выходе первого сумматора появится пилообразный сигнал, смещённый вниз по горизонтальной оси на 0,5. К выходу первого сумматора подключено первое реле (Relay), которое выдаёт на выходе «1» если входной сигнал становится больше нуля и выдаёт «0» если входной сигнал меньше «–0,01». А поскольку на вход реле поступает пилообразный сигнал с периодом 0,01 с, минимальным значением «–0,5», и максимальным значением «0,5», то на выходе реле будет положительный единичный сигнал с момента времени 0,005 с (входной сигнал реле становится больше нуля) до 0,01 с (входной сигнал реле становится меньше «–0,01»). Аналогичный процесс будет повторяться каждый полупериод. Сигнал с выхода первого реле будет являться углом регулирования αр. Этот угол регулируется с помощью сигнала, поступающего с внешнего входа In1. Функция второго сумматора и второго реле аналогична первому сумматору и первому реле. Отличие лишь заключается в том, что во втором сумматоре из «пилы» вычитается постоянный сигнал, создаваемый блоком Constant1 и равный «0,08». Сигнал с выхода второго реле будет являться углом регулирования α0. Этот угол регулируется с помощью сигнала, поступающего с внешнего блока Constant1. Определитель знака входного сигнала и следующие за ним элементы служат для распределения сигналов управления (углы регулирования) по полупериодам питающего напряжения между плечами тиристорного моста. Происходит это следующим образом. На выходе определителя знака входного сигнала в первый полупериод сетевого напряжения формируется сигнал, равный «–1», а во второй полупериод – сигнал, равный «-1». Далее этот сигнал поступает на первый и второй элементы – определители входного сигнала относительно нуля: Compare To Zero 1 и Compare To Zero 2. На выходе элемента Compare To Zero 1 в первый полупериод сетевого напряжения формируется сигнал, равный «1», а во второй полупериод – сигнал, равный нулю. На выходе элемента Compare To Zero 2 в первый полупериод сетевого напряжения формируется сигнал, равный нулю, а во второй полупериод – сигнал, равный «1». Далее в соответствии с полупериодом при помощи логических элементов сигналы распределяются по соответствующим выходам системы управления. 2 Расчёт модели упрощённой силовой схемы электровоза Источник напряжения должен генерировать напряжение амплитудой 35кВ, 25кВ, с частотой 50 Гц и фазой, равной нулю. Параметры тягового трансформатора и тиристора приведены соответственно в таблице 6.1 и 6.2. Параметры RL-элементов, имитирующих двигатели, составляют 1 Ом и 3 мГн. Таблица 1 - Параметры блока Linear transformer
Таблица 2 - Параметры блока Thyristor
Параметры элемента источника ступенчатого сигнала (Alpha_p): время переключения 0,02 с; значение сигнала до переключения и значение сигнала после переключения выбирается согласно варианту (Uупр = 0,55 В).  Время моделирования, с   Рисунок 7 – Значения напряжения и тока в первичной обмотке трансформатора 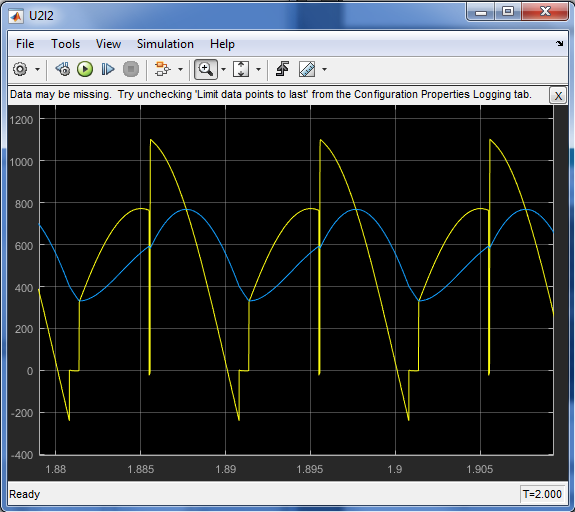   Время моделирования, с Рисунок 8 – Значения выпрямленного напряжения и тока. Рассмотрим показания осциллографов, находящиеся в подсистеме БУВИП. 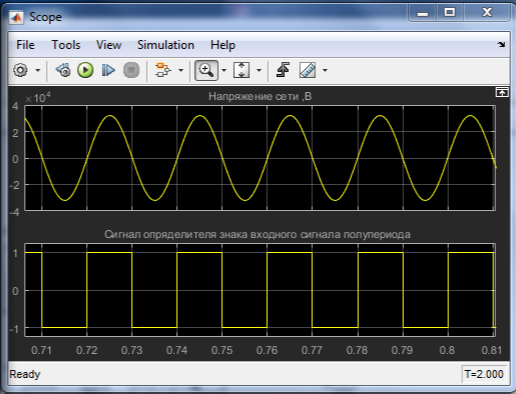   Время моделирования, с Рисунок 9 – Показания блока осциллограф (Scope) 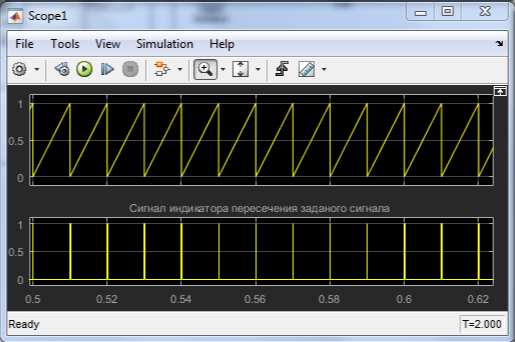   Время моделирования, с Рисунок 10 – Показания блока осциллограф 1 (Scope1)    Время моделирования, с Рисунок 11 – Показания блока осциллограф 2 (Scope2)   Время моделирования, с Время моделирования, с Рисунок 12 – Показания блока осциллограф 3 (Scope3) 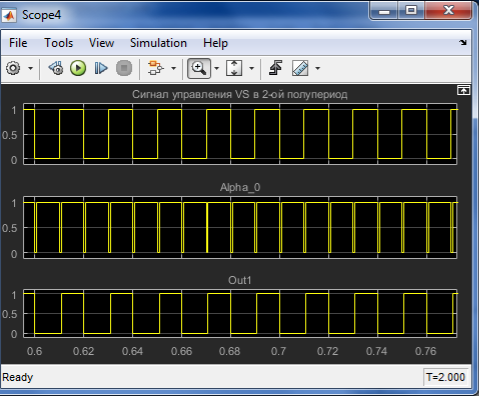    Время моделирования, с Рисунок 13 – Показания блока осциллограф 4 (Scope4)     Время моделирования, с Рисунок 14 – Показания блока осциллограф 5 (Scope5) Вывод: В ходе выполнения лабораторной работы была изучена модель упрощённой силовой схемы электровоза с выпрямительно – инверторным преобразователем (ВИП) и блоком управления выпрямительно – инверторного преобразователя (БУВИП). Наглядно было рассмотрено изменение напряжения и тока после их преобразования при помощи ВИП и БУВИП. |