Лабораторная работа Программа управления роботом Omega. Лабораторная работа Программа управления роботом Omega
 Скачать 0.94 Mb. Скачать 0.94 Mb.
|

|
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ БРАТСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ Кафедра «УТС» Дисциплина «Основы робототехники» Лабораторная работа «Программа управления роботом «Omega»»
Братск 2022 Задание: Написать программу управления роботом «Omega» для перемещения двух объектов. Описание объектов: Объект 1: Х=0.30, Y=0.34, L=0.10,угол=0.00о; Объект 2: Х=0.20, Y=0.25, L=0.40,угол=45.00о. Маркер 1: Х=0.30, Y=0.34, L=0.00,угол=0.00о; Маркер 2: Х= -0.40, Y=-0.20, L=0.00,угол=0.00о; Маркер 3: Х=0.20, Y=0.25, L=0.30,угол=0.00о;  Рис.1. Расположение объектов до выполнения программы. 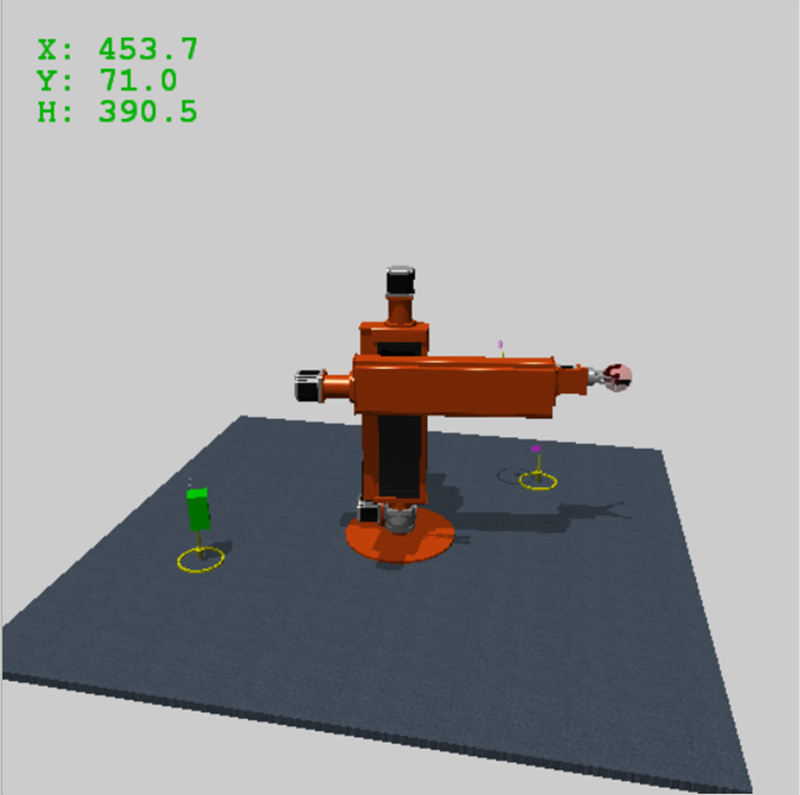 Рис.2. Расположение объектов в процессе выполнения программы. 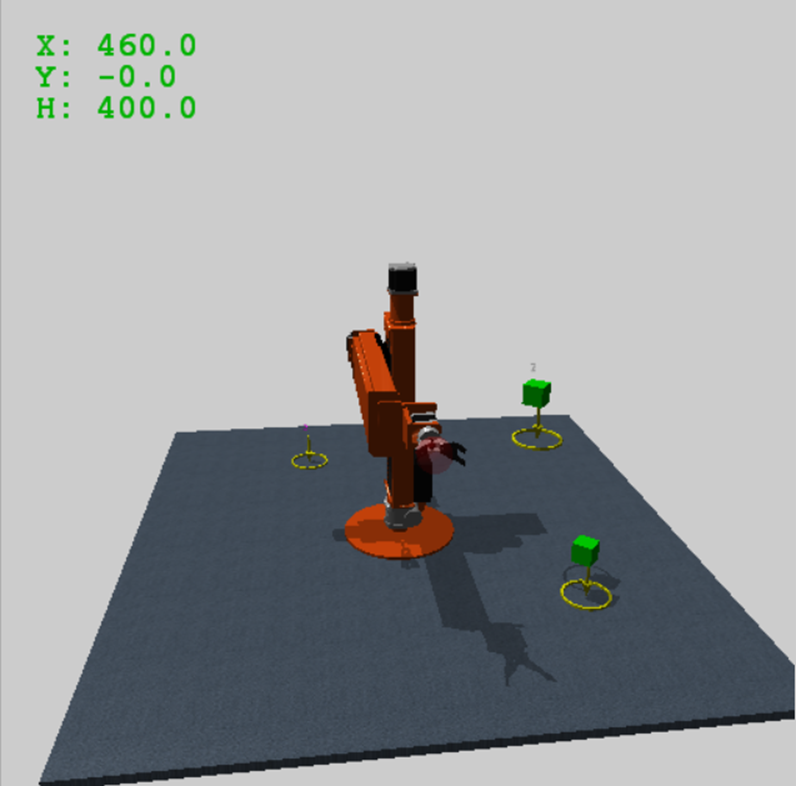 Рис.3. Расположение объектов после выполнения программы. Управляющая программа: RHOME; G01 F100; G01 X15 Y220 Z48 F100; G01 Y297 F100; LOCKERONP100; G01 X19 Y297 Z206 F100; LOCKEROFFP100; G01 Y267 F70; G01 X144 Y50 Z50 F100; G01 Y0 F100; LOCKERONP100; G01 X18 Y259 Z206 F100; LOCKEROFFP100; G01 Y220 F100; RHOME; G01 X18 Y220 Z206 F100; G01 Y259 F100; LOCKERONP100; G01 X144 Y0 Z50 F100; LOCKEROFFP100; G01 Y50 F70; G01 X19 Y267 Z206 F100; G01 Y297 F100; LOCKERONP100; G01 X15 Y297 Z48 F100; LOCKEROFFP100; G01 Y230 F100; RHOME; END Циклограмма роботы: 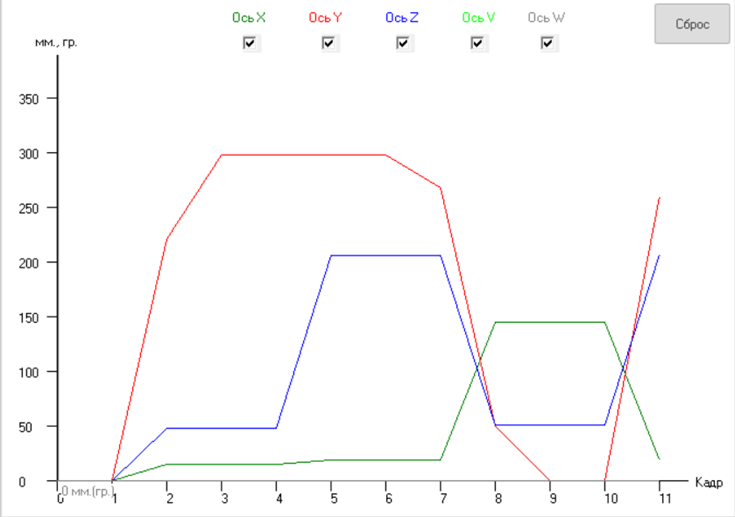 Рис.4. Циклограмма работы робота «Omega» с 1 по 11 кадр.  Рис.5. Циклограмма работы робота «Omega» с 11 по 22 кадр. Вывод: Написана программа управления робота «Omega» для перемещения двух объектов. Количество выполненных шагов составляет 22. |