Реферат Лазерный гироскоп. Лазерный гироскоп
 Скачать 373.5 Kb. Скачать 373.5 Kb.
|

|
Б алтийский Государственный Технический Университет им. Д.Ф.Устинова «ВОЕНМЕХ»  Реферат по Инф. Устр. И Сист. Тема: Лазерный гироскоп Студент: Аблямитов Э.С. Группа: СН188 Преподаватель: Коротков Е.Б. Санкт-Петербург 2012г. ОглавлениеОглавление 2 Гироскоп (от древнегреческого γυρο «вращение» и σκοπεω «смотреть») - устройство, способное измерять изменение углов ориентации связанного с ним тела относительно инерциальной системы координат, как правило основанное на законе сохранения вращательного момента (момента импульса). 2 История 2 Механические гироскопы 3 Вибрационные гироскопы 4 Оптические гироскопы 4 Применение гироскопов в технике 5 Лазерный гироскоп 5 Устройство лазерного гироскопа. Частотные характеристики. 6 Примерами лазерной техники могут служить: 10 Перспективы развития гироскопического приборостроения 11 Литература: 12 Гироскоп (от древнегреческого γυρο «вращение» и σκοπεω «смотреть») - устройство, способное измерять изменение углов ориентации связанного с ним тела относительно инерциальной системы координат, как правило основанное на законе сохранения вращательного момента (момента импульса). ИсторияДо изобретения гироскопа человечество использовало различные методы определения направления в пространстве. Издревле люди ориентировались визуально по удалённым предметам, в частности, по Солнцу. Уже в древности появились первые приборы: отвес и уровень, основанные на гравитации. В средние века в Китае был изобретён компас, использующий магнетизм Земли. В Европе были созданы астролябия и другие приборы, основанные на положении звёзд.  Гироскоп изобрёл Иоганн Боненбергер и опубликовал описание своего изобретения в 1817 году. Однако французский математик Пуассон ещё в 1813 году упоминает Боненбергера как изобретателя этого устройства. Главной частью гироскопа Боненбергера был вращающийся массивный шар в кардановом подвесе. В 1832 году американец Уолтер Р. Джонсон придумал гироскоп с вращающимся диском. Французский учёный Лаплас рекомендовал это устройство в учебных целях. В 1852 году французский учёный Фуко усовершенствовал гироскоп и впервые использовал его как прибор, показывающий изменение направления (в данном случае — Земли), через год после изобретения маятника Фуко, тоже основанного на сохранении вращательного момента. Именно Фуко придумал название «гироскоп». Фуко, как и Боненбергер, использовал карданов подвес. Не позднее 1853 года Фессель изобрёл другой вариант подвески гироскопа. Преимуществом гироскопа перед более древними приборами является то, что он правильно работает в сложных условиях (плохая видимость, тряска, электромагнитные помехи). Однако гироскоп быстро останавливался из-за трения. Во второй половине XIX века было предложено использовать электродвигатель для разгона и поддержания движения гироскопа. Впервые на практике гироскоп был применён в 1880-х годах инженером Обри для стабилизации курса торпеды. В XX веке гироскопы стали использоваться в самолётах, ракетах и подводных лодках вместо компаса или совместно с ним. Механические гироскопы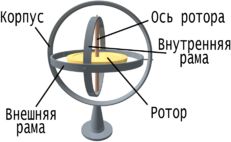 Среди механических гироскопов выделяется роторный гироскоп - быстро вращающееся твёрдое тело, ось вращения которого способна изменять ориентацию в пространстве. При этом скорость вращения гироскопа значительно превышает скорость поворота оси его вращения. Основное свойство такого гироскопа — способность сохранять в пространстве неизменное направление оси вращения при отсутствии воздействия на неё моментов внешних сил. Впервые это свойство использовал Фуко в 1852 г. для экспериментальной демонстрации вращения Земли. Именно благодаря этой демонстрации гироскоп и получил своё название от греческих слов «вращение», «наблюдаю». Вибрационные гироскопыВибрационные гироскопы — устройства, сохраняющие свои колебания в одной плоскости при повороте. Данный тип гироскопов является намного более простым и дешёвым при сопоставимой точности по сравнению с роторным гироскопом. В зарубежной литературе также употребляется термин «Кориолисовы вибрирующие гироскопы» — так как принцип их действия основан на эффекте силы Кориолиса, как и у роторных гироскопов. Например, вибрационные гироскопы применяются в системе измерения наклона электрического самоката Сегвей. Система состоит из пяти вибрационных гироскопов, чьи данные обрабатываются двумя микропроцессорами. Разновидности вибрационных гироскопов
Оптические гироскопыДелятся на волоконно-оптические и лазерные гироскопы. Принцип действия основан на эффекте Саньяка и теоретически объясняется с помощью специальной теорией относительности (СТО). Согласно СТО скорость света постоянна в любой инерциальной системе отсчёта. В то время как в неинерциальной системе она может отличаться от c. При посылке луча света в направлении вращения прибора и против направления вращения разница во времени прихода лучей (определяемая интерферометром) позволяет найти разницу оптических путей лучей в инерциальной системе отсчёта, и, следовательно, величину углового поворота прибора за время прохождения луча. Применение гироскопов в технике Свойства гироскопа используются в приборах — гироскопах, основной частью которых является быстро вращающийся ротор, который имеет несколько степеней свободы (осей возможного вращения). Чаще всего используются гироскопы, помещённые в карданов подвес. Такие гироскопы имеют 3 степени свободы, то есть он может совершать 3 независимых поворота вокруг осей АА', BB' и CC', пересекающихся в центре подвеса О, который остаётся по отношению к основанию A неподвижным. Гироскопы, у которых центр масс совпадает с центром подвеса O, называются астатическими, в противном случае - статическими гироскопами. Для обеспечения вращения ротора гироскопа с высокой скоростью применяются специальные гиромоторы. Для управления гироскопом и снятия с него информации используются датчики угла и датчики момента. Гироскопы используются в виде компонентов как в системах навигации (авиагоризонт, гирокомпас, инерциальная навигация и т. п.), так и в нереактивных системах ориентации и стабилизации космических аппаратов. Лазерный гироскопРегистрирующее устройство преобразует интенсивность света в электрический сигнал. Для измерения угла поворота подсчитывают число периодов сигнала, а для измерения угловой скорости достаточно определить его частоту. Лазерный гироскоп обладает угловым разрешением, недоступным механическим гироскопам. Так, если оптический резонатор имеет форму треугольника со стороной около 12 см, то каждому периоду синусоиды выходного сигнала соответствует поворот на одну угловую секунду. Показания лазерного гироскопа не зависят от линейных и угловых ускорений, выходной сигнал легко обрабатывается компьютерами, которые все шире используются в навигационных системах. С одинаковым изяществом такой гироскоп может измерять угловые скорости от тысяч оборотов в секунду до скоростей в сотни миллиардов раз меньших, до 0,01 градуса в час. Это очень мало: один оборот с такой скоростью занимает более четырех лет; часовая стрелка движется в 3.000 раз быстрее. Такая точность измерения соответствует точности прилунения в десять километров. Включение лазерного гироскопа занимает тысячные доли секунды. Принципиальный предел его точности, по некоторым оценкам, равен одной миллионной градуса в час. Это один оборот за 40 000 лет! Лазерный гироскоп измеряет угловые перемещения только вокруг одной оси. Но можно создать блок из трех лазерных гироскопов, оси, чувствительности которых взаимно перпендикулярны. Такой прибор позволяет получить полную информацию об угловом положении, например, космического корабля в пространстве  Устройство лазерного гироскопа. Частотные характеристики.Лазерный гироскоп (фотонный гироскоп) - квантовый гироскоп, чувствительным элементом которого является кольцевой лазер, генерирующий 2 встречные волны. Действие Л. г. основано на зависимости разности собственных частот кольцевого оптического резонатора для встречных волн от скорости его вращения относительно инерциальной системы отсчёта. В отличие от волоконно-оптического гироскопа, регистрирующего угл. скорость вращения, Л. г. позволяет определять изменение угла поворота. 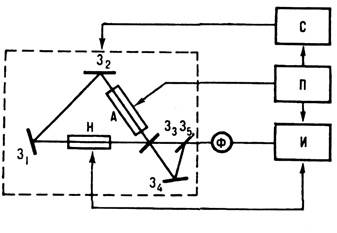 Рис. 1. Принципиальная схема лазерного гироскопа: Зt-З3 - зеркала; А - активная среда; З4, З5 - зеркала смесителя встречзых волн (З6 - полупрозрачное); Н- невзаимный элемент; Ф - фотодетектор; П - блок питания; С - система стабилизации параметров лазера; И - система обработки информации. Резонатор кольцевого лазера состоит из 3 (или 4) отражателей (зеркал или призм), установленных на Жёстком основании и обеспечивающих замкнутую траекторию (треугольник или прямоугольник) для встречных волн (рис. 1). Возникновение разности частот встречных волн следует из зависимости времени обхода светом вращающегося контура от скорости вращения и направления обхода. Согласно общей теории относительности, разность времён обхода вращающегося контура Здесь Т. к. Здесь где K=4S/ Разностная частота Большая величина К позволяет измерять малые скорости вращения при небольших размерах Л. г. Напр., для кольцевого гелий-неонового лазера ( С квантовомеханич. точки зрения Л. г. представляет собой прибор, вращение к-рого вызывает изменение энергий где Зависимость где Для регистрации малых 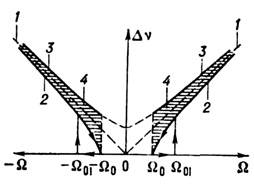 Рис. 2. Частотные характеристики лазерного гироскопа: 1 - идеальная ( В качестве активной среды в Л. г. обычно используется газовая смесь двух изотопов неона (20Ne, 22Ne) с Не, характеризующаяся неоднородно уширенной линией рабочего перехода. Это позволяет устранить конкурентное взаимодействие встречных волн и полунить высокую стабильность. Исследуются кольцевые лазеры с кристаллич. или стеклообразной активной средой. Предельная точность измерения Преимущества Л. г. перед традиц. механич. гироскопами: возможность использования в системах, где гироскоп жёстко связан с движущимся объектом; цифровой выход информации; большой диапазон Примерами лазерной техники могут служить:Самый точный в мире лазерный гироскоп построен в геодезической обсерватории Веттцелль, Мюнхенского технического университета. Он предназначен для фиксации тончайшего изменения смещения земной оси при вращении. Точность прибора такова, что он может улавливать биения земной оси в доли угловых минут. Гироскоп - основная часть таких приборов, как указатель курса, поворота, горизонта, сторон света, гирокомпас. Внутри этих приборов вращаются со скоростью в несколько десятков тысяч оборотов в минуту небольшие роторы-волчки, укрепленные в кардановом подвесе. Корпус прибора можно поворачивать как угодно, при этом ось вращающегося гироскопа будет сохранять неизменное положение в пространстве. Большое применение находят гироскопические приборы для автоматического управления движением самолетов и кораблей. Для поддержания заданного курса корабля служит авторулевой, а самолета - автопилот. В приборе авторулевой применен свободный гироскоп с большим собственным моментом импульса и малой силой трения в местах карданова подвеса. Направление движения корабля задается направлением оси свободного гироскопа. При любых отклонениях корабля от курса, ось гироскопа сохраняет свое прежнее пространственное направление, а карданов подвес поворачивается относительно корпуса корабля. Поворот рамы карданова подвеса отслеживается при помощи специальных устройств которые выдают команды автоматам на поворот руля и возвращение корабля на заданный курс. Автопилот снабжен двумя гироскопами. У одного из них ось располагают вертикально и в таком положении раскручивают гироскоп. Вертикально расположенная ось гироскопа задает горизонтальную плоскость. Ось второго гироскопа располагают горизонтально, ориентируя ее вдоль оси самолета. Этот гироскоп постоянно "знает" курс самолета. Оба гироскопа дают соответствующие команды механизмам управления, поддерживающим полет самолета по заданному курсу. Гироскопы применяют так же в системах навигации. Высокоточная интегрированная лазерно-гироскопическая спутниково-навигационная система для комплектации пилотажно-навигационных комплексов отечественных гражданских самолетов (головной разработчик ФГУП НИИ "Полюс"). Интеграция лазерно-гироскопической инерциальной системы со спутниковой системой глобального позиционирования (GPS, USA и ГЛОНАСС, Россия) позволила создать новый перспективный класс навигационных систем для гражданской авиации, в первую очередь, для самолетов предыдущих выпусков: ИЛ-62М, ТУ-134, ТУ-154, ИЛ-76 (транспортный), ИЛ-86, ЯК-40, Як-42 и др., основанный на высоконадежных, малогабаритных лазерных гироскопах, разработанных ранее для спецтехники, и на отечественном комбинированном (GPS/ГЛОНАСС) спутниковом приемнике. Перспективы развития гироскопического приборостроенияСегодня созданы достаточно точные гироскопические системы, удовлетворяющие большой круг потребителей. Сокращение средств, выделяемых для военно-промышленного комплекса в бюджетах ведущих мировых стран, резко повысило интерес к гражданским применениям гироскопической техники. Например, сегодня широко распространено использование микромеханических (МЭМС) гироскопов в системах стабилизации автомобилей или видеокамер. По мнению сторонников таких методов навигации, как GPS и ГЛОНАСС, выдающийся прогресс в области высокоточной спутниковой навигации сделал ненужными автономные средства навигации. Сейчас разрабатывается система навигационных спутников третьего поколения. Она позволит определять координаты объектов на поверхности Земли с точностью до единиц сантиметров в дифференциальном режиме, при нахождении в зоне покрытия корректирующего сигнала DGPS. При этом якобы отпадает необходимость в использовании курсовых гироскопов. Например, установка на крыльях самолета двух приемников спутниковых сигналов, позволяет получить информацию о повороте самолета вокруг вертикальной оси. Однако системы GPS оказываются неспособны точно определять положение в городских условиях, при плохой видимости спутников. Подобные проблемы обнаруживаются и в лесистой местности. В самолётах GPS оказывается точнее акселерометров на длинных участках. Но использование двух GPS-приёмников для измерения углов наклона самолета даёт погрешности до нескольких градусов. Подсчёт курса путём определения скорости самолёта с помощью GPS также не является достаточно точным. Поэтому, в сегодняшних навигационных системах оптимальным решением является комбинация GPS и гироскопических систем. За последние десятилетия, эволюционное развитие гироскопической техники подступило к порогу качественных изменений. Именно поэтому внимание специалистов в области гироскопии сейчас сосредоточилось на поиске нестандартных применений таких приборов. Открылись совершенно новые интересные задачи: разведка полезных ископаемых, предсказание землетрясений, сверхточное измерение положений железнодорожных путей и нефтепроводов, медицинская техника и многие другие. Литература:
|